一种基于LQR控制的自动驾驶车辆控制方法和装置与流程
本发明属于自动驾驶,具体涉及一种基于lqr控制的自动驾驶车辆控制方法和装置。
背景技术:
1、自动驾驶车辆的轨迹跟踪控制是实现车辆自动驾驶的关键技术之一,轨迹跟踪中的横向控制功能主要是通过控制车辆前轮转角,缩小车辆当前轨迹与目标轨迹之间的横向偏差,实现车辆沿着规划的目标轨迹行驶。
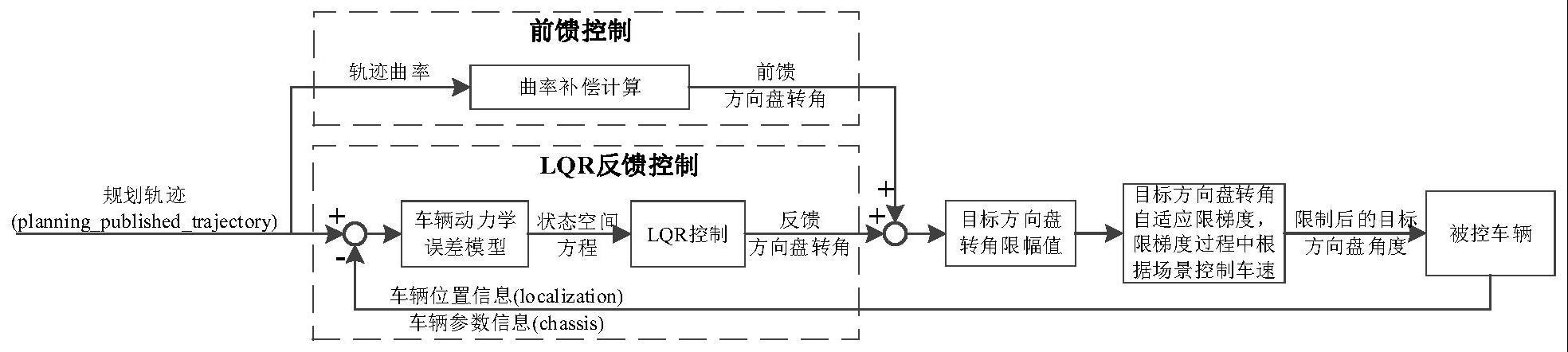
2、线性二次型调节器(linear quadratic regulator,lqr)较常应用于车辆横向控制中。lqr控制是在整个时域进行优化求解黎卡提方程,然后计算反馈矩阵k,根据反馈矩阵k和状态获得最优控制量u。自动驾驶横向lqr控制原理图如下图1所示,根据轨迹曲率计算的前馈方向盘转角加上lqr计算的反馈方向盘转角,然后对相加的目标方向盘转角进行限幅值和限梯度处理得到作用于被控车辆的目标方向盘转角。其中,lqr计算的反馈方向盘转角主要是根据车辆的动力学误差模型进行离散化得到如下状态方程然后根据目标轨迹和车辆参数、实际位置得到当前时刻的状态,定义目标函数其含义是使用最小的控制量u(k)使系统的状态x(k)维持在零值附近,当目标函数最小时通过求解黎卡提方程就得到最优的状态反馈矩阵k,根据反馈矩阵k和状态获得最优反馈控制量u。
3、由于lqr在优化求解过程中不考虑控制量及控制量变化率约束,会导致控制量即目标方向盘转角阶跃变化从而影响横向控制的舒适性。目前通常对lqr求解得到的反馈方向盘转角和根据曲率得到的前馈方向盘转角之和的幅值限制在车辆允许最大方向盘转角范围内,然后对限制后的方向盘转角变化率采用固定梯度进行限制。该方法根据固定梯度限制方向盘转角变化率不能适应不同车速以及不同曲率弯道的场景,无法保证横向控制舒适性。
技术实现思路
1、本发明的目的在于提供一种基于lqr控制的自动驾驶车辆控制方法和装置,用以解决现有技术中的横向lqr控制方法根据固定梯度限制方向盘转角变化率不能适应所有工况导致横向控制舒适性较差的问题。
2、为解决上述技术问题,本发明提供了一种基于lqr控制的自动驾驶车辆控制方法,包括如下步骤:
3、1)根据规划轨迹的目标位置和实际位置之间的差值,进行lqr控制,得到当前时刻的反馈方向盘转角;并根据当前时刻的反馈方向盘转角得到当前时刻的目标方向盘转角;
4、2)计算当前时刻的目标方向盘转角减去上一时刻的方向盘转角后的差值,得到当前时刻的目标方向盘转角变率;
5、3)根据目标轨迹的曲率得到当前曲率的最大方向盘转角变化率限值,根据实际车速得到当前车速的最大方向盘转角变化率限值,求取当前曲率的最大方向盘转角变化率限值和当前车速的最大方向盘转角变化率限值中的较小值,并利用所述较小值对当前时刻的目标方向盘转角变率进行限值处理,得到当前时刻限值后的目标方向盘转角变化率;
6、4)利用当前时刻限值后的目标方向盘转角变化率和上一时刻的方向盘转角,得到当前时刻限值后的目标方向盘转角;利用当前时刻限值后的目标方向盘转角对车辆进行横向控制。
7、其有益效果为:本发明根据不同的工况自适应计算方向盘转角梯度,具体为根据不同曲率和车速计算得到相应的当前曲率的最大方向盘转角变化率限值和当前车速的最大方向盘转角变化率限值,然后利用两者的较小值对求解得到的控制量的变化率进行限制,能满足不同曲率和车速等工况对方向盘转角控制量变化率需求的同时改善横向舒适性。
8、进一步地,若车辆工况为从非自动驾驶进入自动驾驶,则在进入自动驾驶时令目标方向盘转角为车辆当前反馈的实际方向盘转角。
9、其有益效果为:对于刚进入自动驾驶时反馈的实际方向盘转角与目标方向盘转角与目标方向盘转角通常有较大阶跃差值,若直接响应目标方向盘转角会使方向盘会突变到目标转角导致舒适性不好,因而在刚进入自动驾驶时令目标方向盘转角为车辆当前反馈的实际方向盘转角,从当前反馈的实际方向盘转角平滑过渡到目标方向盘转角,以保证车辆驾驶舒适性。
10、进一步地,若方向盘转角变化率大于自适应梯度限值,则需限制车速,且控制车速为目标轨迹的参考车速与设定车速的较小值;其中,所述自适应梯度限值为所述当前曲率的最大方向盘转角变化率限值和当前车速的最大方向盘转角变化率限值中的较小值。
11、其有益效果为:纵向上直接响应目标轨迹的期望速度,但是也不能静止转向回正,这样会导致轮胎磨损,因而在方向盘回正期间控制纵向响应较低车速,以保证驾驶舒适性。
12、进一步地,若方向盘转角变化率小于等于正常梯度限值,则无需限制车速,控制车辆响应目标轨迹的车速;其中,正常梯度限值小于自适应梯度限值。
13、进一步地,若方向盘转角变化率大于正常梯度限值且小于等于自适应梯度限值,则是否限速与上一状态一致。
14、进一步地,步骤1)中当前时刻的目标方向盘转角为当前时刻的反馈方向盘转角与当前时刻的前馈方向盘转角之和,且当前时刻的前馈方向盘转角为对目标轨迹的曲线进行曲率补偿计算得到。
15、其有益效果为:利用前馈控制可以抵消反馈控制的滞后性。
16、为解决上述技术问题,本发明还提供了一种基于lqr控制的自动驾驶车辆控制装置,包括存储器和处理器,所述处理器用于执行存储在存储器中的计算机程序指令以实现上述介绍述的基于lqr控制的自动驾驶车辆控制方法,并能达到与该方法相同的有益效果。
技术特征:
1.一种基于lqr控制的自动驾驶车辆控制方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的基于lqr控制的自动驾驶车辆控制方法,其特征在于,若车辆工况为从非自动驾驶进入自动驾驶,则在进入自动驾驶时令目标方向盘转角为车辆当前反馈的实际方向盘转角。
3.根据权利要求1所述的基于lqr控制的自动驾驶车辆控制方法,其特征在于,若方向盘转角变化率大于自适应梯度限值,则需限制车速,且控制车速为目标轨迹的参考车速与设定车速的较小值;其中,所述自适应梯度限值为所述当前曲率的最大方向盘转角变化率限值和当前车速的最大方向盘转角变化率限值中的较小值。
4.根据权利要求3所述的基于lqr控制的自动驾驶车辆控制方法,其特征在于,若方向盘转角变化率小于等于正常梯度限值,则无需限制车速,控制车辆响应目标轨迹的车速;其中,正常梯度限值小于自适应梯度限值。
5.根据权利要求4所述的基于lqr控制的自动驾驶车辆控制方法,其特征在于,若方向盘转角变化率大于正常梯度限值且小于等于自适应梯度限值,则是否限速与上一状态一致。
6.根据权利要求1~5任一项所述的基于lqr控制的自动驾驶车辆控制方法,其特征在于,步骤1)中当前时刻的目标方向盘转角为当前时刻的反馈方向盘转角与当前时刻的前馈方向盘转角之和,且当前时刻的前馈方向盘转角为对目标轨迹的曲线进行曲率补偿计算得到。
7.一种基于lqr控制的自动驾驶车辆控制装置,其特征在于,包括存储器和处理器,所述处理器用于执行存储在存储器中的计算机程序指令以实现如权利要求1~6任一项所述的基于lqr控制的自动驾驶车辆控制方法。
技术总结
本发明属于自动驾驶技术领域,具体涉及一种基于LQR控制的自动驾驶车辆控制方法和装置。本发明根据不同的工况自适应计算方向盘转角梯度,然后对求解得到的控制量的变化率进行限制,在满足不同工况对控制量变化率需求的同时改善横向舒适性;另外对于刚进入自动驾驶时从实际方向盘转角向目标方向盘转角平滑且控制车辆在平滑过程中缓慢行驶,既避免方向盘原地回正期间磨损轮胎又改善方向盘控制舒适性。
技术研发人员:严亮,董海涛,胡钱洋
受保护的技术使用者:宇通客车股份有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!