一种基于速度协调的多自主水下航行器协同导引方法及系统
本发明属于水下航行器控制领域,涉及一种基于速度协调的多自主水下航行器协同导引方法。更具体的说是通过调整不同航行器间的速度关系,来实现多条自主水下航行器同时制导动态目标点。
背景技术:
1、在上个世纪中,人类在关于天空、陆地上的无人载具研究取得了大量突破性的进展,产生了无人机、无人车、仿生机器人等高智能化成果;与之相对的,由于海洋环境与陆地环境、天空环境相迥异,直至上世纪末本世纪初,关于水下无人自主航行器的研究才开始步入蓬勃发展阶段。经过过去几十年的迅速发展,水下无人自主航行器取得了长足进展,已经成为开发和利用海洋的一项重要工具,有着极为广泛的应用。
2、随着科学技术的进步与发展,人类正在走向更加深远的海洋,单一的自主水下航行器已越来越满足各项任务的需要,关于水下航行器集群的研究越发成为热点话题,水下航行器协同导引技术,是无人自主水下航行器集群研究中的重点技术。水下航行器协同导引任务,是指水下航行器集群中的单体在满足时间相同等约束的条件下,集群整体完成对动态目标的制导,或集群整体同时抵达动态目标点的任务。
3、目前常见的集群协同导引技术大致可分为有主从与无主从两种形式,它们通常是通过改变集群内单体的导引律来实现。其中有主从协同导引方法在实际试验过程中很容易出现不符合主从约束的情况,进而造成协同导引任务的失败;无主从协同方法不存在上述问题,但采用改变导引律的实现方式,使得集群中离目标近的成员在协同过程中,为了满足时间协同的约束条件,不得不放弃已知最优路线,造成“绕远路以拖时间”的现象。
技术实现思路
1、本发明所要解决的技术问题是:
2、为了避免现有技术的不足之处,本发明提供一种基于速度协调的多自主水下航行器协同导引方法及系统。
3、为了解决上述技术问题,本发明采用的技术方案为:
4、一种基于速度协调的多自主水下航行器协同导引方法,其特征在于步骤如下:
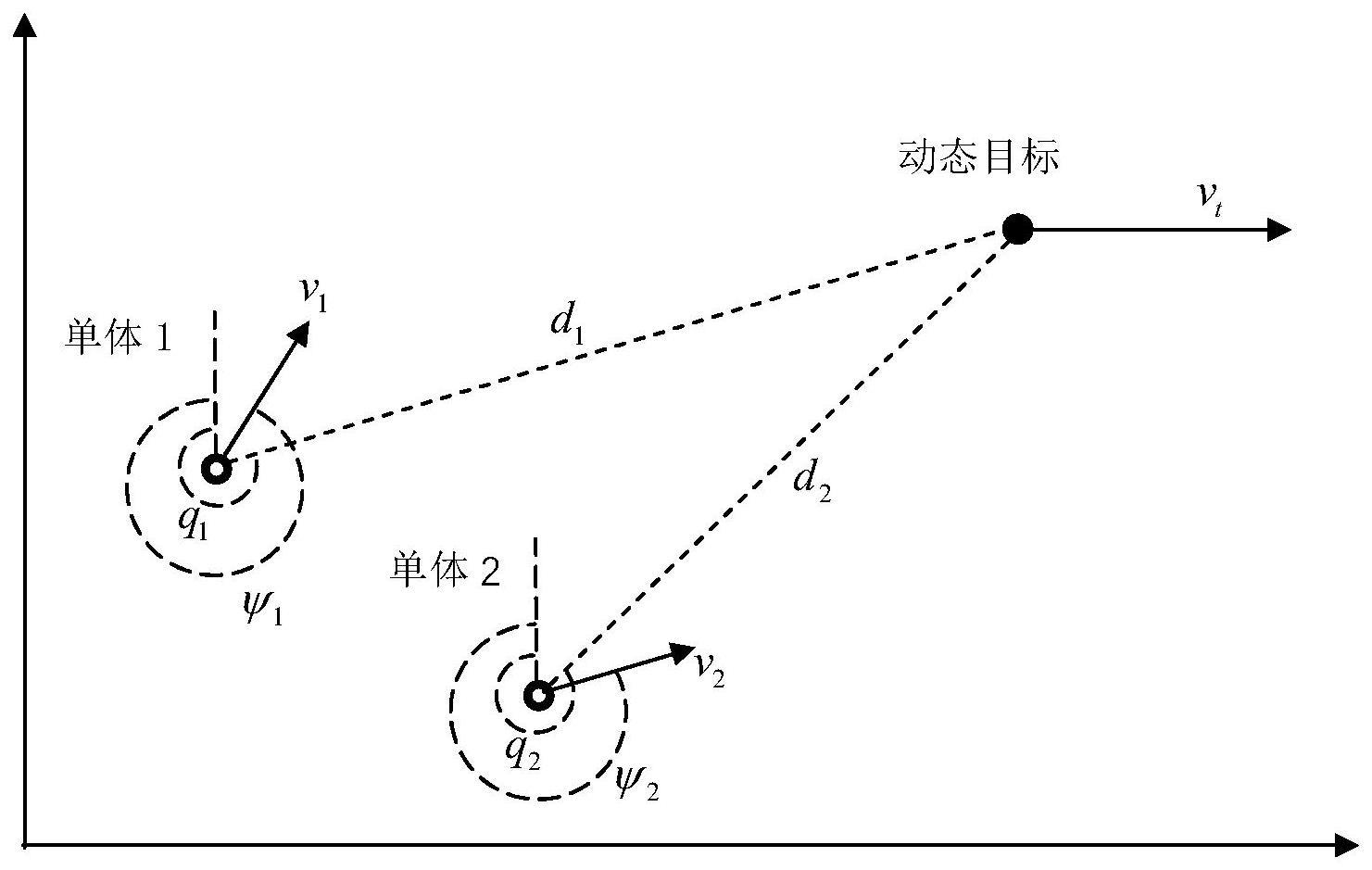
5、步骤1:初始化,在某一初始位置布放航行器集群及目标,集群单体根据传感器采集到的目标位置数据,可得出自身与目标之间的视线角q及其变化率取比例系数为10,按照比例导引方法,由下式计算出航向角ψ的期望角速度并以目标深度为期望深度,进行独立的动态目标导引;
6、
7、步骤2:检查是否满足深度要求,当集群与目标处于同一水平面内时,开始进行速度调整;根据传感器信息采集到的自身位置(x,y)和目标位置(xt,yt),由下式计算出单体与目标之间的相对距离d;
8、
9、步骤3:采集自身速度信息v,根据下式计算出单体的预估时间t;
10、
11、步骤4:根据下式计算出集群单体中最短的预估时间tmin;
12、tmin=min(t1,t2,t3,…)
13、步骤5:集群中与tmin不一致的成员根据下式调整自己的期望速度vr;
14、
15、步骤6:重复步骤2、3、4、5,直至集群中的预估时间渐进一致收敛;当集群中与目标距离的最大值dmax小于给定阈值时,认为成功制导动态目标:
16、dmax=max(d1,d2,d3,…)
17、本发明进一步的技术方案:步骤1中所述的传感器采用主动声呐设备。
18、本发明进一步的技术方案:步骤3中采用声学传感器采集速度信息。
19、本发明进一步的技术方案:步骤6给定阈值d=10。
20、一种基于速度协调的多自主水下航行器协同导引系统,其特征在于包括:相对距离计算模块、预估时间计算模块、速度调整模块;
21、所述的相对距离计算模块:当集群与目标处于同一水平面内时,根据自身位置和目标位置,计算出单体与目标之间的相对距离;
22、所述的预估时间计算模块:根据采集自身速度信息、单体与目标之间的相对距离、单体与目标之间的视线角及其变化率,计算单体的预估时间,且在所有单体的预估时间挑选出时间最短;
23、所述的速度调整模块:当集群中预估最短时间不一致的单体,根据单体与目标之间的相对距离、预估最短时间调整速度,使集群所有单体预估时间一致。
24、本发明的有益效果在于:
25、本发明提供的一种基于速度协调的多自主水下航行器协同导引方法及系统,在保持集群中单体导引律不变的情况下,通过调节彼此之间的速度关系,来满足时间相同的约束条件,达到同时抵达动态目标的效果。相较于传统协同技术,具有以下技术优点:
26、1.本发明无需主从条件,减少了主从约束,在协同过程中依据最短预估时间进行速度调节。
27、2.本发明不改变集群单体的导引律,有效避免了“绕远路以拖时间”这种问题,节约了集群整体航行时间与距离。
28、3.本发明依据分布式的思想,每个成员根据约束条件自行调节自身速度,不存在负责集中协调的个体,有效减少了运算时间,提升了集群协同的智能化程度。
技术特征:
1.一种基于速度协调的多自主水下航行器协同导引方法,其特征在于步骤如下:
2.根据权利要求1所述的基于速度协调的多自主水下航行器协同导引方法,其特征在于:步骤1中所述的传感器采用主动声呐设备。
3.根据权利要求1所述的基于速度协调的多自主水下航行器协同导引方法,其特征在于:步骤3中采用声学传感器采集速度信息。
4.根据权利要求1所述的基于速度协调的多自主水下航行器协同导引方法,其特征在于:步骤6给定阈值d=10。
5.一种基于速度协调的多自主水下航行器协同导引系统,其特征在于包括:相对距离计算模块、预估时间计算模块、速度调整模块;
技术总结
本发明涉及一种基于速度协调的多自主水下航行器协同导引方法及系统,属于水下航行器控制领域。所述方法包括当集群与目标处于同一水平面内时,根据自身位置和目标位置,计算出单体与目标之间的相对距离;根据采集自身速度信息、单体与目标之间的相对距离、单体与目标之间的视线角及其变化率,计算单体的预估时间,且在所有单体的预估时间挑选出时间最短;当集群中预估最短时间不一致的单体,根据单体与目标之间的相对距离、预估最短时间调整速度,使集群所有单体预估时间一致。所述系统为实现上述方法的多个模块。本发明依据分布式的思想,每个成员根据约束条件自行调节自身速度,有效减少了运算时间,提升了集群协同的智能化程度。
技术研发人员:高剑,程学超,王昭,陈依民,潘光,张福斌,彭星光
受保护的技术使用者:西北工业大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!