一种机器人铺丝轨迹规划控制方法与流程
本发明涉及机器人铺丝,尤其涉及一种机器人铺丝轨迹规划控制方法。
背景技术:
1、机器人铺丝是指使用机器人或自动化设备完成金属网、铁丝等材料的铺设过程。在传统的铺丝操作中,通常需要手工定位、计量、剪切和铺放,占用大量的人工和时间,而且难以保证铺设精度和效率。因此,采用机器人铺丝技术可以提高铺设精度和效率,降低人工成本并减少工作风险,同时还能够满足大批量、高质量、复杂形状的铺设需求。机器人铺丝技术应用于多个领域,如道路、桥梁、建筑结构等领域的钢筋具体加工、船舶、飞行器等制造中的金属板覆盖、自行车等运动装备的车轮辐,并在移动智能终端、电子通讯等领域开展了芯片连线、小型电缆组装等一系列应用。
2、但是,现有的机器人铺丝轨迹规划控制方法,不便对铺丝情况进行实时监测与查看,不便对铺丝数据进行保存分析,在使用时存在一定的局限性,使用效果不够理想。
技术实现思路
1、本发明的目的是为了解决现有的机器人铺丝轨迹规划控制方法,不便对铺丝情况进行实时监测与查看,不便对铺丝数据进行保存分析,在使用时存在一定的局限性,使用效果不够理想的缺点,而提出的一种机器人铺丝轨迹规划控制方法。
2、为了实现上述目的,本发明采用了如下技术方案:
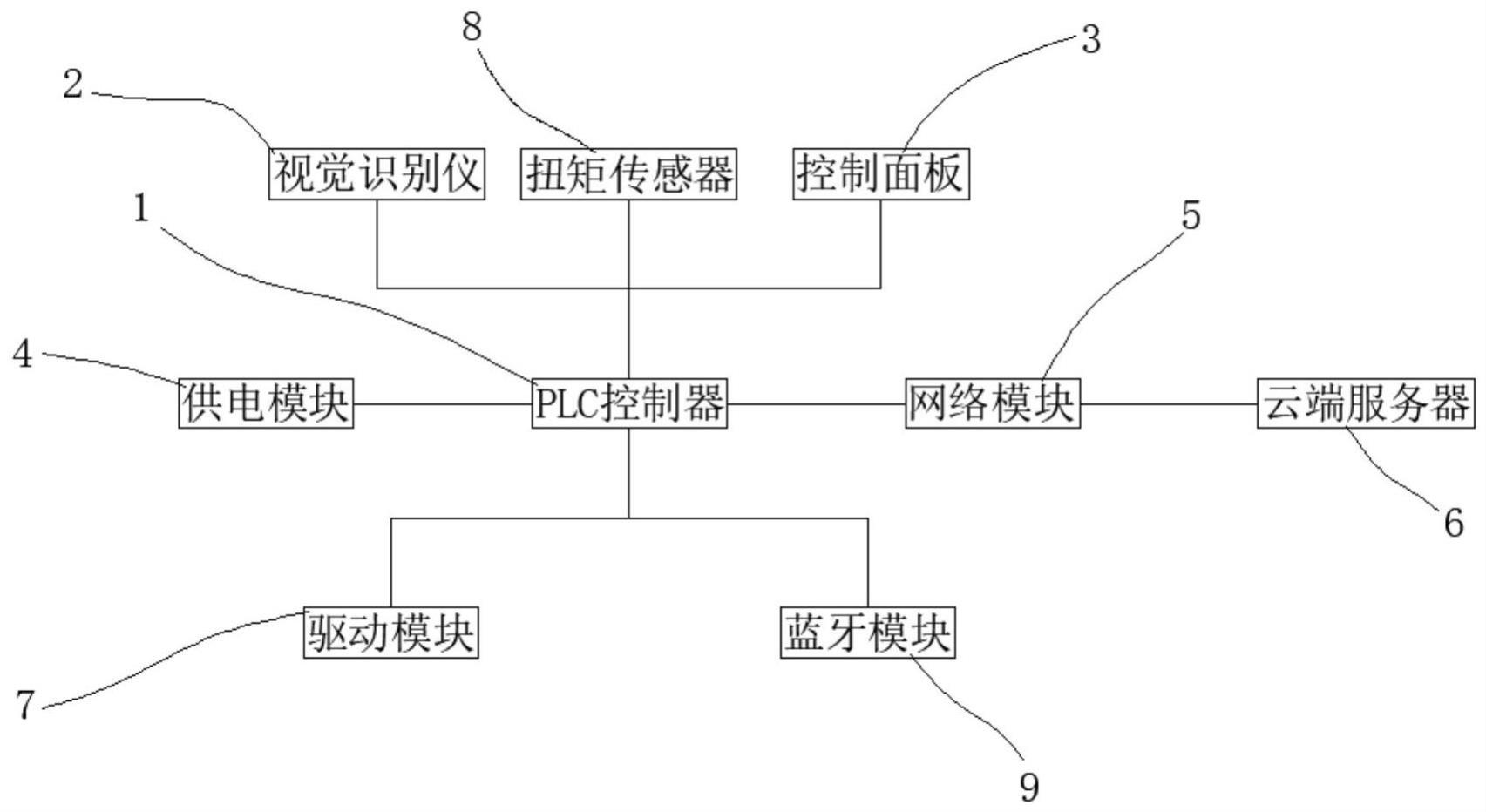
3、一种机器人铺丝轨迹规划控制系统,包括plc控制器、视觉识别仪、控制面板、供电模块、网络模块、云端服务器、驱动模块、扭矩传感器以及蓝牙模块;
4、所述视觉识别仪的输出端、所述控制面板的输出端以及所述扭矩传感器的输出端均与所述plc控制器的输入端相连接,所述供电模块的输出端与所述plc控制器的输入端相连接,所述plc控制器的输出端与所述网络模块的输入端相连接,所述网络模块的输出端与所述云端服务器的输入端相连接,所述plc控制器的输出端与所述驱动模块的输入端以及所述蓝牙模块的输入端相连接。
5、在一个优选的实施方式中,一种机器人铺丝轨迹规划控制方法,包括以下步骤:
6、s1:规划铺丝路径并通过控制面板设置铺丝任务;
7、s2:控制面板将铺丝任务数据传递至plc控制器,由plc控制器进行运动学模拟;
8、s3:plc控制器通过驱动模块进行铺丝,视觉识别仪对铺设情况进行识别分析,扭矩传感器对铺丝过程中的张力进行检测;
9、s4:视觉识别仪与扭矩传感器将获取到的数据传递至plc控制器,由plc控制器对数据进行分析,再将数据指令传递至驱动模块;
10、s5:plc控制器将获取到的数据传输至网络模块,网络模块将获取到的数据传输至云端服务器进行存储;
11、s6:plc控制器将数据传输至蓝牙模块,工作人员可通过移动设备获取蓝牙模块传输的数据,对铺丝情况进行远程查看。
12、在一个优选的实施方式中,所述视觉识别仪用于进行视觉导航,所述扭矩传感器用于监测铺丝过程中的力控情况。
13、在一个优选的实施方式中,所述控制面板用于输入铺丝任务,所述供电模块用于进行供电。
14、在一个优选的实施方式中,所述网络模块用于传输数据,所述云端服务器用于存储模块。
15、在一个优选的实施方式中,所述驱动模块用于驱动铺丝,所述蓝牙模块用于传输数据。
16、本发明中,的一种机器人铺丝轨迹规划控制方法,plc控制器将获取到的数据传输至网络模块,网络模块将获取到的数据传输至云端服务器进行存储,便于对铺设数据进行保存分析;
17、本发明设计合理,可以对铺丝情况进行实时监测与查看,便于对铺丝数据进行保存分析,使用效果好,工作效率高,值得推广使用。
技术特征:
1.一种机器人铺丝轨迹规划控制系统,其特征在于,包括:
2.根据权利要求1所述的一种机器人铺丝轨迹规划控制方法,其特征在于,包括以下步骤:
3.根据权利要求1所述的一种机器人铺丝轨迹规划控制方法,其特征在于:所述视觉识别仪(2)用于进行视觉导航,所述扭矩传感器(8)用于监测铺丝过程中的力控情况。
4.根据权利要求1所述的一种机器人铺丝轨迹规划控制方法,其特征在于:所述控制面板(3)用于输入铺丝任务,所述供电模块(4)用于进行供电。
5.根据权利要求1所述的一种机器人铺丝轨迹规划控制方法,其特征在于:所述网络模块(5)用于传输数据,所述云端服务器(6)用于存储模块。
6.根据权利要求1所述的一种机器人铺丝轨迹规划控制方法,其特征在于:所述驱动模块(7)用于驱动铺丝,所述蓝牙模块(9)用于传输数据。
技术总结
本发明公开了一种机器人铺丝轨迹规划控制方法,涉及机器人铺丝技术领域,针对现有的机器人铺丝轨迹规划控制方法,不便对铺丝情况进行实时监测与查看,不便对铺丝数据进行保存分析,在使用时存在一定的局限性,使用效果不够理想的问题,现提出如下方案,包括PLC控制器、视觉识别仪、控制面板、供电模块、网络模块、云端服务器、驱动模块、扭矩传感器以及蓝牙模块;所述视觉识别仪的输出端、所述控制面板的输出端以及所述扭矩传感器的输出端均与所述PLC控制器的输入端相连接。本发明设计合理,可以对铺丝情况进行实时监测与查看,便于对铺丝数据进行保存分析,使用效果好,工作效率高,值得推广使用。
技术研发人员:李貌,曾聚,曾严
受保护的技术使用者:苏州泛北智能科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!