一种蚁群算法的优化方法
本发明涉及agv路径规划,具体涉及一种蚁群算法的优化方法。
背景技术:
1、自动导引车(automatedguidedvehicle,agv)是一种无人驾驶的运输车辆。因其具有动化程度高、系统运行稳定可靠、运行灵活等特点被广泛应用于仓储物流领域,相比于传统仓储物流运输大大节省了人力成本、提高工作效率。因此,如何高效规划agv路径已成为一个重要的研究课题;路径规划是指移动机器人从起点开始规划出一条到终点的最佳移动路径,且有能力避开环境中存在的障碍物,不与其发生碰撞,防止危险的发生;对于agv路径规划问题,国内外学者做了大量的研究工作,形成了较多成熟的规划方法,其中智能路径规划方法包括有遗传算法、模拟退火算法、粒子群算法和蚁群算法等。蚁群算法(antcolonyoptimization,aco)是一种正反馈群智能优化算法,具有并行性、强鲁棒性、适应性、易与其他算法相结合等特点;蚁群算法最初应用于解决tsp问题,后被应用于其它组合优化问题,如指派问题、车辆路由问题等,但在求解路径时存在搜索效率低、参数较多、易出现算法停滞和陷入局部最优解等缺点,因此许多学者在原蚁群算法基础上进行优化改进:
2、任红格、胡鸿长和史涛提出了基于改进蚁群算法的移动机器人全局路径规划,基于时间空间的信息素更新策略是将路径信息与迭代次数同时应用在信息挥发系数ρ上,动态调整ρ,使信息素满足蚁群在不同时刻,不同区域的取值需求,可以有效避免劣质解的干扰;
3、张天瑞、吴宝库和周福强提出了面向机器人全局路径规划的改进蚁群算法,提出信息素挥发因子自适应更新策略,扩大算法搜索范围,提高收敛速度,但同样也使得运行时间延长;
4、虽然众多学者已经在原蚁群算法基础上进行优化改进,但是现有的蚁群算法在移动机器人路径规划中存在的收敛速度慢、转角次数过多以及易陷入局部最优的问题。
技术实现思路
1、本发明目的是针对背景技术中存在的问题,提出一种蚁群算法的优化方法。
2、本发明的技术方案:一种蚁群算法的优化方法,包括以下具体步骤:
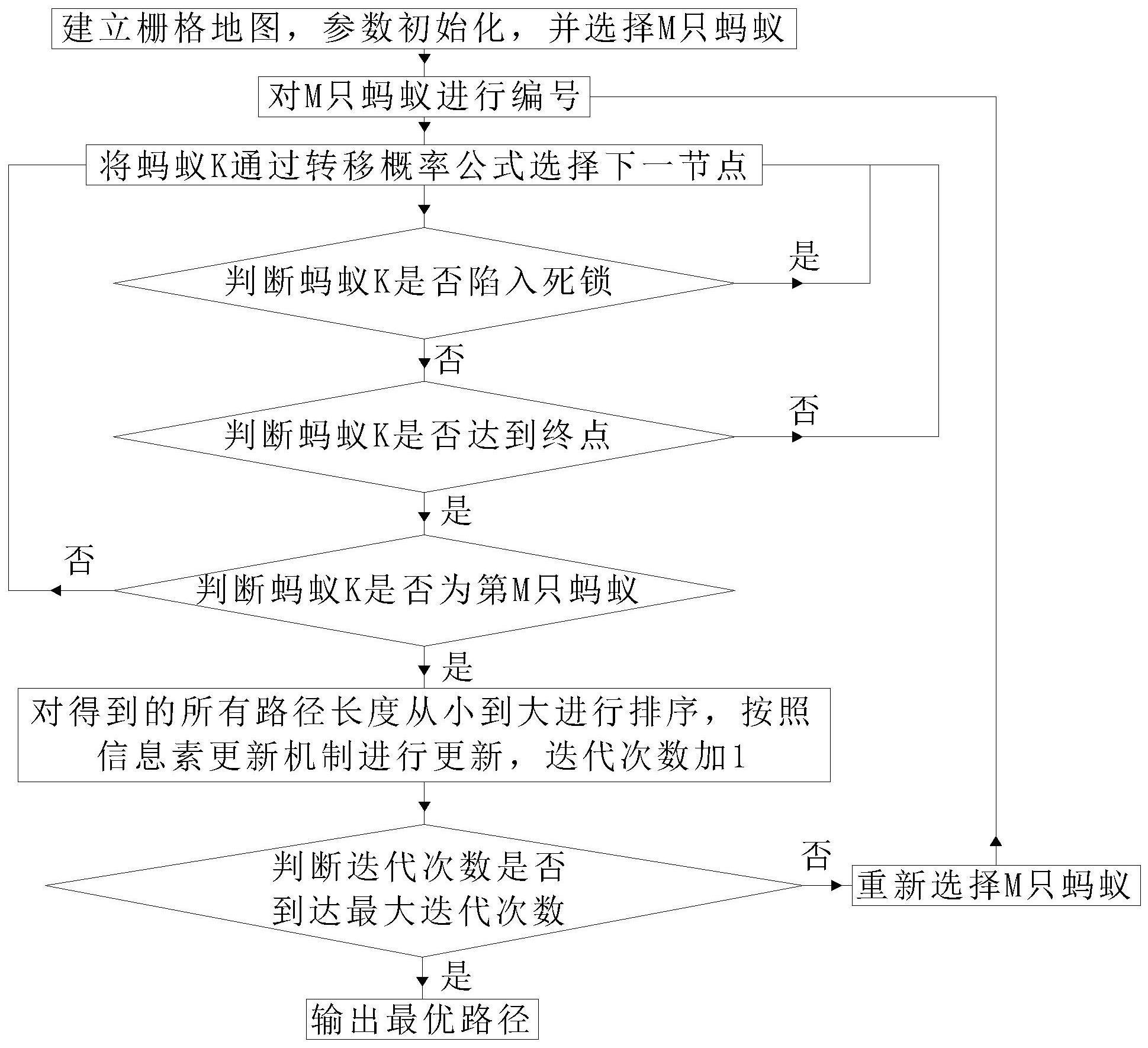
3、s1、建立栅格地图,参数初始化,并选择m只蚂蚁;
4、s2、对m只蚂蚁进行编号排序,定义为蚂蚁k1、蚂蚁k2....蚂蚁km;
5、s3、蚂蚁k通过转移概率公式选择下一节点;
6、s4、判断蚂蚁k是否陷入死锁,
7、若是,则放弃蚂蚁k,选用下一只蚂蚁k继续执行s3;
8、若否,则继续执行s5;
9、s5、判断蚂蚁k是否达到终点,
10、若否,则放弃蚂蚁k,选用下一只蚂蚁k继续执行s3;
11、若是,则记录蚂蚁k行走的路径,并继续判断蚂蚁k是否为第m只蚂蚁;
12、若是,则继续执行s6;
13、若否,则放弃蚂蚁k,选用下一只蚂蚁k继续执行s3;
14、s6、对得到的所有路径长度从小到大进行排序,按照信息素更新机制进行更新,迭代次数加1;
15、s7、判断迭代次数是否到达最大迭代次数;
16、若是,则继续执行s8;
17、若否,则重新选择m只蚂蚁,并继续执行s2;
18、s8、输出最优路径。
19、优选的,s1中初始化的参数包括蚂蚁总数m、信息素浓度因子α、启发信息强度因子β、信息素初始强度值q、信息素挥发系数ρ、需要更新信息素的蚂蚁比例u和最大迭代次数kmax。
20、优选的,转移概率公式为:
21、其中,q为取自集合(0,1)的随机数;为自适应的动态变量;
22、j1为随机选择的下一节点,j2为采用公式b选择的下一节点,公式b为:
23、其中,a为蚂蚁下一可选节点的集合;表示第k只蚂蚁在i节点时,选择下一节点j的概率;
24、τij(t)为t时刻节点i到j的信息素浓度;
25、ηij(t)表示距离启发函数:
26、
27、其中,dij为节点i与节点j的欧氏距离;djd为节点j与目标点的欧式距离;
28、其中θ为当前节点i与下一节点j的直线和当前节点i与上一节点的直线所组成的夹角。
29、优选的,信息素更新机制的计算公式为:
30、τij(t+1)=(1-ρ)τij(t)+δτij;
31、
32、
33、z=μm;
34、其中,δτij表示两节点上蚂蚁释放信息素的和;表示两节点上信息素增量;lk表示蚂蚁kn经过路径长度;q为常数,表示信息素强度初值;lg为该次迭代的最优路径长度,krank为排序后第kn只蚂蚁序号,z为需进行信息素二次更新的蚂蚁数量;u表示进行信息素二次更新的蚂蚁比例,取值为(0,1)。
35、与现有技术相比,本发明的上述技术方案具有如下有益的技术效果:
36、本发明提供的蚁群算法的优化方法中引入转角启发函数,增加了路径选择的指向性,有效地缩短机器人在转弯过程中不必要时间;重新改进蚁群算法的距离启发函数,有效地缩短了算法的运行时间和最优移动路径的距离;改进了转移概率公式,在迭代前期增加搜索空间,迭代后期加快收敛速度;制定对信息素进行有区别的更新策略,加快寻优速度;设置信息素阈值,避免算法陷入局部最优;本发明提供的蚁群算法的优化方法能在最短路径长度,拐点数量和收敛速度方面都体现出来明显的优势,在复杂程度不同的环境中均能保持极高的收敛速度,本发明提供的算法明显具有优越性和稳健性。
技术特征:
1.一种蚁群算法的优化方法,其特征在于,包括以下具体步骤:
2.根据权利要求1所述的一种蚁群算法的优化方法,其特征在于,s1中初始化的参数包括蚂蚁总数m、信息素浓度因子α、启发信息强度因子β、信息素初始强度值q、信息素挥发系数ρ、需要更新信息素的蚂蚁比例u和最大迭代次数kmax。
3.根据权利要求2所述的一种蚁群算法的优化方法,其特征在于,转移概率公式为:
4.根据权利要求3所述的一种蚁群算法的优化方法,其特征在于,信息素更新机制的计算公式为:
技术总结
本发明涉及AGV路径规划技术领域,具体为一种蚁群算法的优化方法,步骤为S1、建立栅格地图,参数初始化,并选择M只蚂蚁;S2、对M只蚂蚁进行编号排序;S3、蚂蚁通过转移概率公式选择下一节点;S4、判断蚂蚁是否陷入死锁,若是则放弃蚂蚁继续执行S3;若否则继续判断蚂蚁是否达到终点,若否则放弃蚂蚁继续执行S3;若是则记录蚂蚁行走的路径,并继续判断蚂蚁是否为第M只蚂蚁;若是则对得到的所有路径长度从小到大进行排序,按照信息素更新机制更新;若否则执行S3;S5、判断迭代次数是否到达最大迭代次数;若是则输出最优路径;若否则重新选择M只蚂蚁并继续执行S2。本发明提供的算法能提高蚁群算法的收敛速度,减少拐点数量。
技术研发人员:罗子灿,何广
受保护的技术使用者:湖南工业大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!