一种基于电磁循迹与蓝牙Mesh组网的自动驾驶轮椅装置
本发明涉及医疗康复,具体涉及一种基于电磁循迹与蓝牙mesh组网的自动驾驶轮椅装置。
背景技术:
1、目前医院,老人院,残疾人学校等特殊场所下有困难人群的移动仍需通过护理人员等人力帮助才可进行简单的移动,并且需要花费大量时间才能寻找到目的地。目前半自动驾驶轮椅在实际使用时,仍存在有以下问题:路径局限:辨色循迹轮椅只能运用于较为简单的室内环境中使用,其色条循迹必须一路到底,不能在复杂的地形中使用,并且只能实用于平面循迹。因此,无法在医院等地形复杂的场地真正投入实用。外部干扰大:辩色循迹对光照的要求较高,光照不足或者光线受到干扰,就会影响到循迹的准确性。同时,由于辩色循迹需要依赖不同颜色的导航色条进行判断,因此如果周围环境中存在颜色相似的物体或者干扰源,就容易出现误判或者干扰。并且,辨色循迹轮椅较长时间使用后,其色条易发生色变,需要工作者时常维护,因此辨色循迹方法难以长时间使用。控制延迟:辩色循迹轮椅在开始使用后必须抵达终点或手动断开才能进行其他移动,对于使用者路径中途希望更改路径显得十分困难。
技术实现思路
1、本发明的目的是提供一种基于电磁循迹与蓝牙mesh组网的自动驾驶轮椅装置,该装置能够选择自动驾驶模式和手动驾驶模式,自动驾驶根据目的地灵活规划路径,在自动驾驶时面对突发情况能够灵活应变。
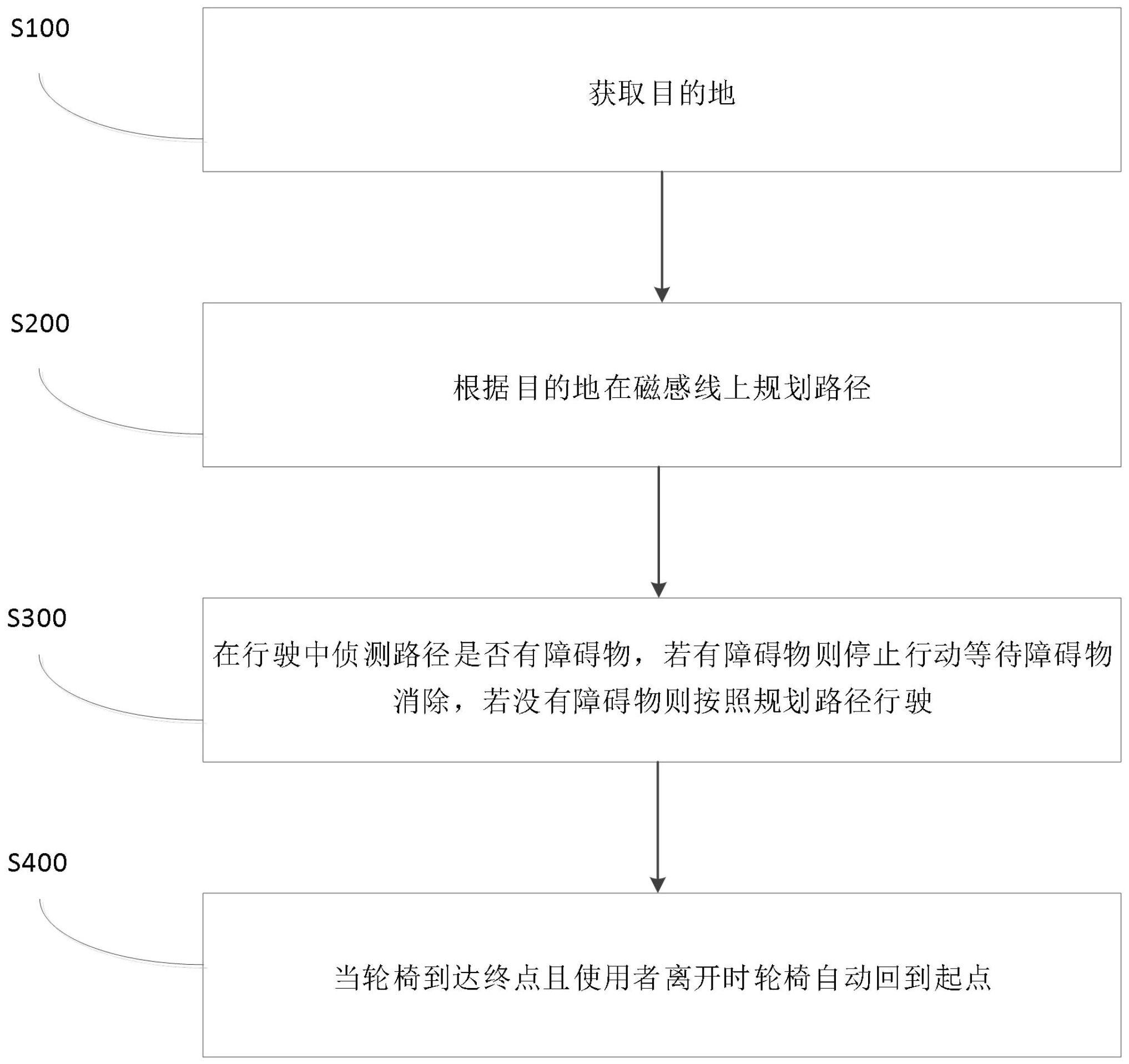
2、一种基于电磁循迹与蓝牙mesh组网的自动驾驶轮椅装置控制方法,包括:
3、获取目的地;
4、根据目的地在磁感线上规划路径;
5、在行驶中侦测路径是否有障碍物,若有障碍物则停止行动等待障碍物消除,若没有障碍物则按照规划路径行驶;
6、当轮椅到达终点且使用者离开时轮椅自动回到起点。
7、优选地,根据目的地在磁感线上规划路径包括:
8、采用优化的基于二叉树的dijkstra算法规划路径:
9、设v是路径中包含全部路径点的集合,将v分成2组,第一组为已求出最优路径的路径点集合,记为s;第二组为未确定最优路径的路径点集合,记为u;
10、算法初始时,s只包含起点a,u包含除a外的路径点;
11、对u中的路径点添加距离权重和岔口权重;
12、根据各个路径点的距离权重和岔口权重从u中挑选路径点规划出最优路径:d[min]=d(s,v)+s[si],并将最优路径上的路径点从u移动到s中,式中d[min]为最佳路径,d(s,v)为从节点s到节点v的距离,s[si]为所需要经过的节点的加权值。
13、一种基于电磁循迹与蓝牙mesh组网的自动驾驶轮椅装置,包括:
14、目的选择单元,用于获取目的地;
15、循迹单元,用于捕获电磁导线位置控制轮椅前进方向;
16、电路控制单元,用于根据目的地在磁感线上规划路径;
17、障碍侦测单元,用于在行驶中侦测路径是否有障碍物;
18、刹车单元,用于在行驶中有障碍物则停止行动等待障碍物消除;
19、控制单元,用于当轮椅到达终点且使用者离开时轮椅自动回到起点。
20、优选地,控制单元中内置归一化算法函数,具体为:
21、通过(x-min)/(max-min)将电磁传感器测得电磁值处理成相对电磁传感器最大电压和最小电压使电磁传感器输出电压值系数保持在0到100之间;
22、式中,min为电磁传感器采集到的最小电压值,max为电磁传感器采集到的最大电压值。
23、优选地,磁敏传感单元,所述磁敏传感单元为电容电感电磁传感器,具体为三联配频配幅电感电容电感;
24、电容电感电磁传感器以chevronv形排列。
25、优选地,障碍侦测单元为超声波传感器和警报器;
26、所述超声波传感器用于侦测路径;
27、所述警报器用于当超声波传感器侦测到路径有障碍物时发出警报。
28、优选地,云端控制单元,用于实时监控轮椅状态和实时更改轮椅目的地。
29、优选地,充电单元,用于实时检测电池电量和连接充电基站。
30、优选地,蓝牙mesh单元,蓝牙mesh单元安装在每一个岔口;
31、控制单元将规划的路径信息传送到蓝牙mesh单元;
32、蓝牙mesh单元根据路径信息控制岔口的电磁线的通断;
33、当岔口电磁线是通路轮椅正常通行,岔口电磁线是断路轮椅不能通行。
34、优选地,控制单元采用mcu单片机作为主控模块,内置wi-fi晶片和蓝牙晶片,通过连接互联网接入云端lot平台;
35、使用c/c++对控制单元进行编辑。
36、本发明通过外置的复数电磁导线之控制电路实现路径规划算法,得出前往目的地的路径信息,并通过蓝牙mesh网络向每个节点发送控制命令,控制交叉口各个节点的通电情况。通过控制在每个交叉口的节点上信号控制器的通断,实现智能轮椅的路径规划和控制。仅需通过微小的电流所激发出的电感即可被安装于装置两端的对称的电磁传感器所切割从而产生电感,通过运放放大后传输到控制电路ad采集口,即可获得路线信息。控制器可通过并串多个继电器的办法,使一个结点即可控制多个前进线路,并随时可接入新增路线,保证轮椅使用的灵活性,以及路径的可拓展性,保证其对复杂情况的处理能力,同时循迹导线所使用电流微弱,在能为mesh组网供电正常工作的情况下能保证发生意外时使用的安全性。
技术特征:
1.一种基于电磁循迹与蓝牙mesh组网的自动驾驶轮椅装置控制方法,其特征在于,包括:
2.根据权利要求1所述的一种基于电磁循迹与蓝牙mesh组网的自动驾驶轮椅装置控制方法,其特征在于,所述根据目的地在磁感线上规划路径包括:
3.一种基于电磁循迹与蓝牙mesh组网的自动驾驶轮椅装置,其特征在于,包括:
4.根据权利要求3所述的一种基于电磁循迹与蓝牙mesh组网的自动驾驶轮椅装置,其特征在于,所述控制单元中内置归一化算法函数,具体为:
5.根据权利要求3所述的一种基于电磁循迹与蓝牙mesh组网的自动驾驶轮椅装置,其特征在于,还包括磁敏传感单元,所述磁敏传感单元为电容电感电磁传感器,具体为三联配频配幅电感电容电感;
6.根据权利要求3所述的一种基于电磁循迹与蓝牙mesh组网的自动驾驶轮椅装置,其特征在于,所述障碍侦测单元为超声波传感器和警报器;
7.根据权利要求3所述的一种基于电磁循迹与蓝牙mesh组网的自动驾驶轮椅装置,其特征在于,还包括云端控制单元,用于实时监控轮椅状态和实时更改轮椅目的地。
8.根据权利要求3所述的一种基于电磁循迹与蓝牙mesh组网的自动驾驶轮椅装置,其特征在于,还包括充电单元,用于实时检测电池电量和连接充电基站。
9.根据权利要求3所述的一种基于电磁循迹与蓝牙mesh组网的自动驾驶轮椅装置,其特征在于,还包括蓝牙mesh单元,蓝牙mesh单元安装在每一个岔口;
10.根据权利要求3所述的一种基于电磁循迹与蓝牙mesh组网的自动驾驶轮椅装置,其特征在于,所述控制单元采用mcu单片机作为主控模块,内置wi-fi晶片和蓝牙晶片,通过连接互联网接入云端lot平台;
技术总结
本发明的目的是提供一种基于电磁循迹与蓝牙Mesh组网的自动驾驶轮椅装置,该装置包括:目的选择单元,用于获取目的地;循迹单元,用于捕获电磁导线位置控制轮椅前进方向;电路控制单元,用于根据目的地在磁感线上规划路径;障碍侦测单元,用于在行驶中侦测路径是否有障碍物;刹车单元,用于在行驶中有障碍物则停止行动等待障碍物消除;控制单元,用于当轮椅到达终点且使用者离开时轮椅自动回到起点。本发明能够选择自动驾驶模式和手动驾驶模式,自动驾驶根据目的地灵活规划路径,在自动驾驶时面对突发情况能够灵活应变。
技术研发人员:刘力斌,李声乐,高裕洪,林嘉洁,陈佳榕,曹望舒
受保护的技术使用者:广东工业大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!