一种基于光电导引的无人机着陆系统
本发明涉及无人机,特别涉及一种基于光电导引的无人机着陆系统。
背景技术:
1、无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞行器。无人机实际上是无人驾驶飞行器的统称,从技术角度定义可以分为:无人固定翼飞机、无人垂直起降飞机、无人飞艇、无人直升机、无人多旋翼飞行器、无人伞翼机等。与载人飞机相比,它具有体积小、造价低、使用方便、对作战环境要求低、战场生存能力较强等优点。
2、无人机着陆控制是无人机控制的重要部分,无人机体积小,更容易受气候条件、地面效应等因素影响,从而无法安全着陆。随着无人机行业的迅猛发展,对无人机着陆的自主性和精确性的要求越来越高。由于gps信号容易被遮挡物干扰和精确度较低的特点,无人机仅仅依靠gps位置信息实现固定位置着陆的精度,无法满足现在对无人机自主精准着陆的需要。随着技术的发展,无人机引导系统的发展趋势,光电引导系统工作于光频,测量精度高、抗电子干扰能力强,具有高分辨率成像能力,而且适装性好,在引导过程中引入光电引导系统,组成多种引导手段互相匹配,互补共存的着陆引导系统,已经成为一种发展趋势。
技术实现思路
1、为了解决上述问题,本发明提供了一种基于光电导引的无人机着陆系统,保证无人机能够更加平稳、更加精准的着陆。
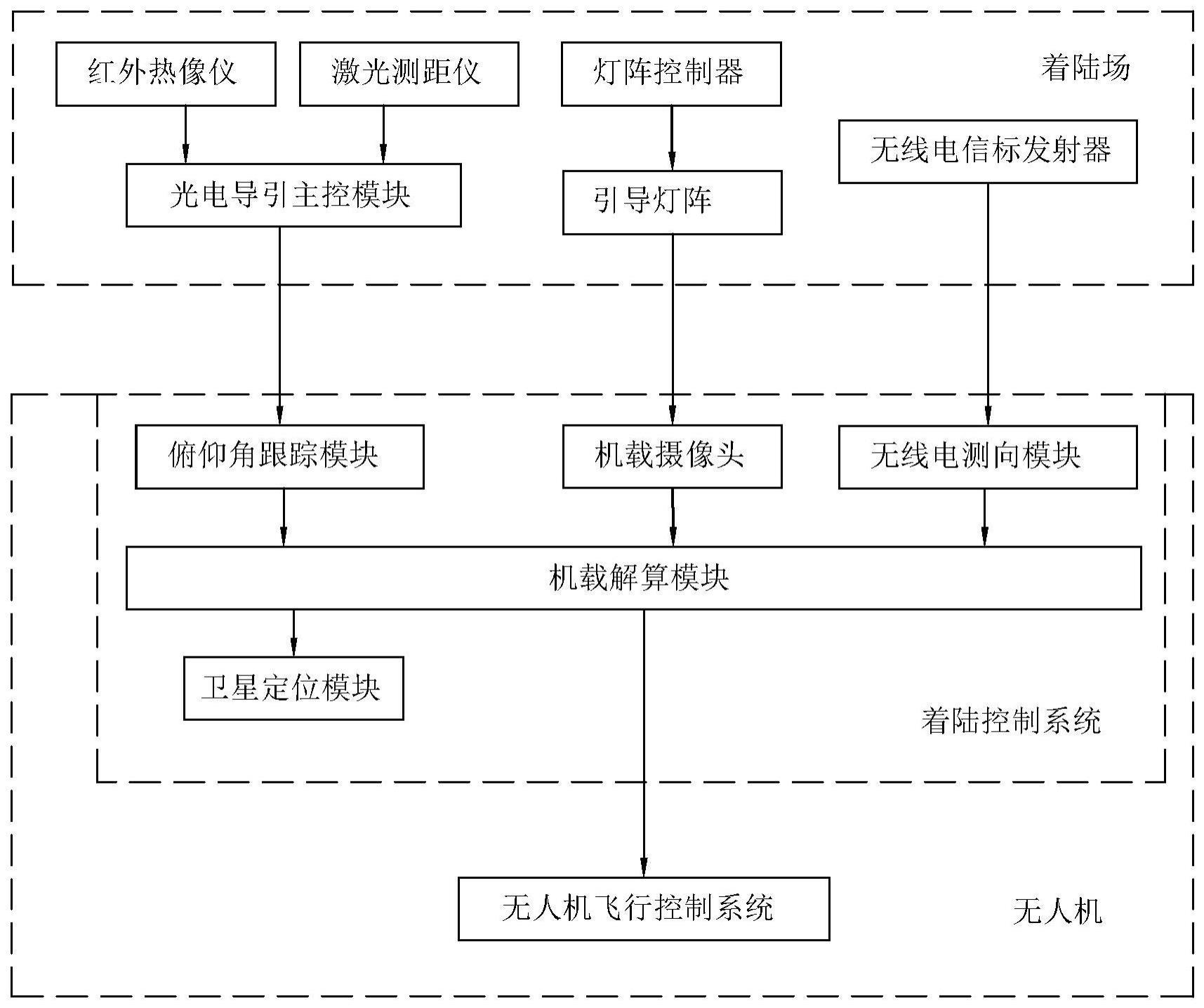
2、为此,本发明的技术方案是:一种基于光电导引的无人机着陆系统,包括:着陆场和无人机,着陆场上设有光电导引系统,
3、所述光电导引系统包括光电导引主控模块、红外热像仪和激光测距仪,红外热像仪用于测量无人机的俯仰信息和方位信息,并将俯仰方位信息发送至光电导引主控模块;
4、激光测距仪用于获取无人机的精确高度和着陆过程中的下降速度,并将其发送至光电导引主控模块;
5、光电导引主控模块根据接收到的俯仰方位和距离信息计算出无人机俯仰光电导引信号,并发送至无人机;
6、所述无人机上设有着陆控制系统,着陆控制系统包括俯仰角跟踪模块、机载解算模块、机载摄像头和无线电测向模块;
7、俯仰角跟踪模块用于接收光电导引系统发送的无人机俯仰光电导引信号;
8、机载摄像头用于获取着陆场图像信息;
9、无线电测向模块,用于接收和检测无线电信标信号及其强度,并发送给机载解算模块;
10、机载解算模块用于根据根据无线电测向模块检测到的无线电信标信号及其强度、机载摄像头获取的图像信息、俯仰角跟踪模块接收的无人机俯仰光电导引信号,进行数据融合计算,生成朝向目标停机位的着陆引导飞行路线,并将着陆引导飞行路线发送至无人机飞行控制系统。
11、在上述方案的基础上并作为上述方案的优选方案:
12、所述光电导引主控模块通过俯仰信息和无人机离着陆场的距离信息,计算无人机垂向近似偏差信号;
13、所述光电导引主控模块通过方位信息和无人机离着陆场的距离信息,计算无人机侧向近似偏差信号;
14、对无人机垂向近似偏差信号和无人机侧向近似偏差信号处理计算得到无人机俯仰光电导引信号。
15、在上述方案的基础上并作为上述方案的优选方案:机载解算模块的数据融合计算逻辑如下:
16、1)从无线电测向模块检测到的无线电信标信号及其强度中计算无人机与该无线电信标发射器之间的相对位置关系;
17、2)从机载摄像头拍摄的图像中获取着陆场信息,生成朝向目标停机位的着陆引导飞行路线;
18、3)根据俯仰角跟踪模块接收的无人机俯仰光电导引信号,进一步修正着陆引导飞行,并将修正后的着陆引导飞行路线发送至无人机飞行控制系统,实现无人机的垂向自动着陆。
19、在上述方案的基础上并作为上述方案的优选方案:所述着陆场上设有多个停机位,各个停机位上均设有引导灯阵,引导灯阵用于配合无人机着陆控制系统引导无人机着陆。
20、在上述方案的基础上并作为上述方案的优选方案:所述引导灯阵包括灯阵控制器,引导灯阵由多个发光体组成,灯阵控制器用于控制发光体的亮灭,各个点亮状态的发光体形成不同的排列组合。
21、在上述方案的基础上并作为上述方案的优选方案:机载解算模块用于接收机载摄像头拍摄的着陆场图像,并判断着陆场图像上引导灯阵的信息是否与预存的引导信息符合。
22、在上述方案的基础上并作为上述方案的优选方案:所述停机位上还设有无线电信标发射器,用于发射特定规律的无线电信号供无人机的无线电测向模块接收和检测。
23、在上述方案的基础上并作为上述方案的优选方案:还包括通信模块,通信模块用于与无人机飞行控制系统、着陆控制系统、光电导引系统进行数据交换。
24、与现有技术相比,本发明的有益效果是:利用光电导引系统获取无人机俯仰光电导引信号,获取当前无人机的俯仰方位信息和与着陆场距离信息;并在无人机下降过程中根据机载摄像头拍摄的图像、无人机俯仰光电导引信号、与引导灯阵的位置关系持续进行迭代计算,通过通信模块实时发送给无人机飞行控制系统,使其调整无人机的高度和姿态,直至无人机着陆。利用光电导引系统弥补了补惯性导航、gps导航的缺陷,提高无人机自主着陆的精度和可靠性,减少了盲降的风险,具有良好的抗干扰性。
技术特征:
1.一种基于光电导引的无人机着陆系统,其特征在于:包括着陆场和无人机,着陆场上设有光电导引系统,
2.如权利要求1所述的一种基于光电导引的无人机着陆系统,其特征在于:
3.如权利要求1所述的一种基于光电导引的无人机着陆系统,其特征在于:机载解算模块的数据融合计算逻辑如下:
4.如权利要求1所述的一种基于光电导引的无人机着陆系统,其特征在于:所述着陆场上设有多个停机位,各个停机位上均设有引导灯阵,引导灯阵用于配合无人机着陆控制系统引导无人机着陆。
5.如权利要求4所述的一种基于光电导引的无人机着陆系统,其特征在于:所述引导灯阵包括灯阵控制器,引导灯阵由多个发光体组成,灯阵控制器用于控制发光体的亮灭,各个点亮状态的发光体形成不同的排列组合。
6.如权利要求5所述的一种基于光电导引的无人机着陆系统,其特征在于:机载解算模块用于接收机载摄像头拍摄的着陆场图像,并判断着陆场图像上引导灯阵的信息是否与预存的引导信息符合。
7.如权利要求4所述的一种基于光电导引的无人机着陆系统,其特征在于:所述停机位上还设有无线电信标发射器,用于发射特定规律的无线电信号供无人机的无线电测向模块接收和检测。
8.如权利要求1所述的一种基于光电导引的无人机着陆系统,其特征在于:还包括通信模块,通信模块用于与无人机飞行控制系统、着陆控制系统、光电导引系统进行数据交换。
技术总结
本发明公开了一种基于光电导引的无人机着陆系统,包括着陆场和无人机,着陆场上设有光电导引系统,用于测量无人机的俯仰方位距离信息,并计算出无人机俯仰光电导引信号,所述无人机上设有着陆控制系统,着陆控制系统包括俯仰角跟踪模块、机载解算模块、机载摄像头和无线电测向模块;机载解算模块进行数据融合计算,生成朝向目标停机位的着陆引导飞行路线,并将着陆引导飞行路线发送至无人机飞行控制系统。本发明利用光电导引系统弥补了补惯性导航、GPS导航的缺陷,提高无人机自主着陆的精度和可靠性,减少了盲降的风险,具有良好的抗干扰性。
技术研发人员:苗宗成,王海洋
受保护的技术使用者:西北工业大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!