一种数据驱动车辆队列容错跟踪控制追踪方法及系统
本发明属于车辆队列控制,涉及一种数据驱动车辆队列容错跟踪控制追踪方法及系统,以解决遭受传感器故障和非周期性拒绝服务攻击影响的车辆队列的安全控制问题。
背景技术:
1、车辆队列控制作为一种协调车辆运行过程的智能交通方法,在提高车辆安全性和提高道路通行能力方面具有广阔的前景,受到了广泛的关注。而在车队运行过程中,可能会面临许多来自内部与外部的挑战,如通信网络带来的网络攻击风险问题,车辆物理与电子部件可能出现的故障、车辆复杂结构导致的模型复杂性与不确定性等诸多因素。这些问题极大地阻碍了社会进步和可持续发展的道路。智能交通系统作为交通控制领域的一个重要发展方向,正是为了解决这些问题而诞生的,其应用也日益迫切,它可以减少交通拥堵,提高交通效率。
2、然而,上述关于车辆控制的研究大多基于相对精确的系统模型。事实上,由于实际系统结构复杂,具有一定的时变特性和非线性,在实际系统中几乎不可能获得准确的模型。随着信息科学技术的发展,化工、机械、运输等实际过程也发生着天翻地覆的变化。这些行业的生产技术和设备规模较大,生产工艺更加复杂。使用第一性原理或基于识别的过程建模变得更加困难。因此,传统的基于模型控制理论对于这类控制问题已经不太适用。针对这些复杂过程发展基于数据的数据驱动控制理论和应用已然成为亟待解决的课题。
3、作为数据驱动控制方法的一种,无模型自适应控制技术近年来受到了较多学者的关注并取得了丰硕的研究成果,提供了控制系统设计的理论框架以及稳定性分析。
4、综上,在车辆队列控制中通信网络会带来网络攻击的潜在风险,有必要将网络问题纳入考虑范围。另外考虑到车辆的电子元件(传感器)在长期运行中可能会出现故障,在行驶过程中,一辆或多辆车辆的故障都可能导致严重后果。因此,实现车辆的容错控制是车辆队列系统顺利运行的必要条件。同时车辆模型的复杂性和不确定性也会阻碍建模和控制过程。
技术实现思路
1、本发明的目的在于提出一种数据驱动车辆队列容错跟踪控制追踪方法,以便能够在车辆队列系统遭受到传感器故障和非周期性拒绝服务攻击的影响下,实现对车辆队列系统的弹性容错无模型自适应队列安全控制。
2、本发明为了实现上述目的,采用如下技术方案:
3、一种数据驱动车辆队列容错跟踪控制追踪方法,包括如下步骤:
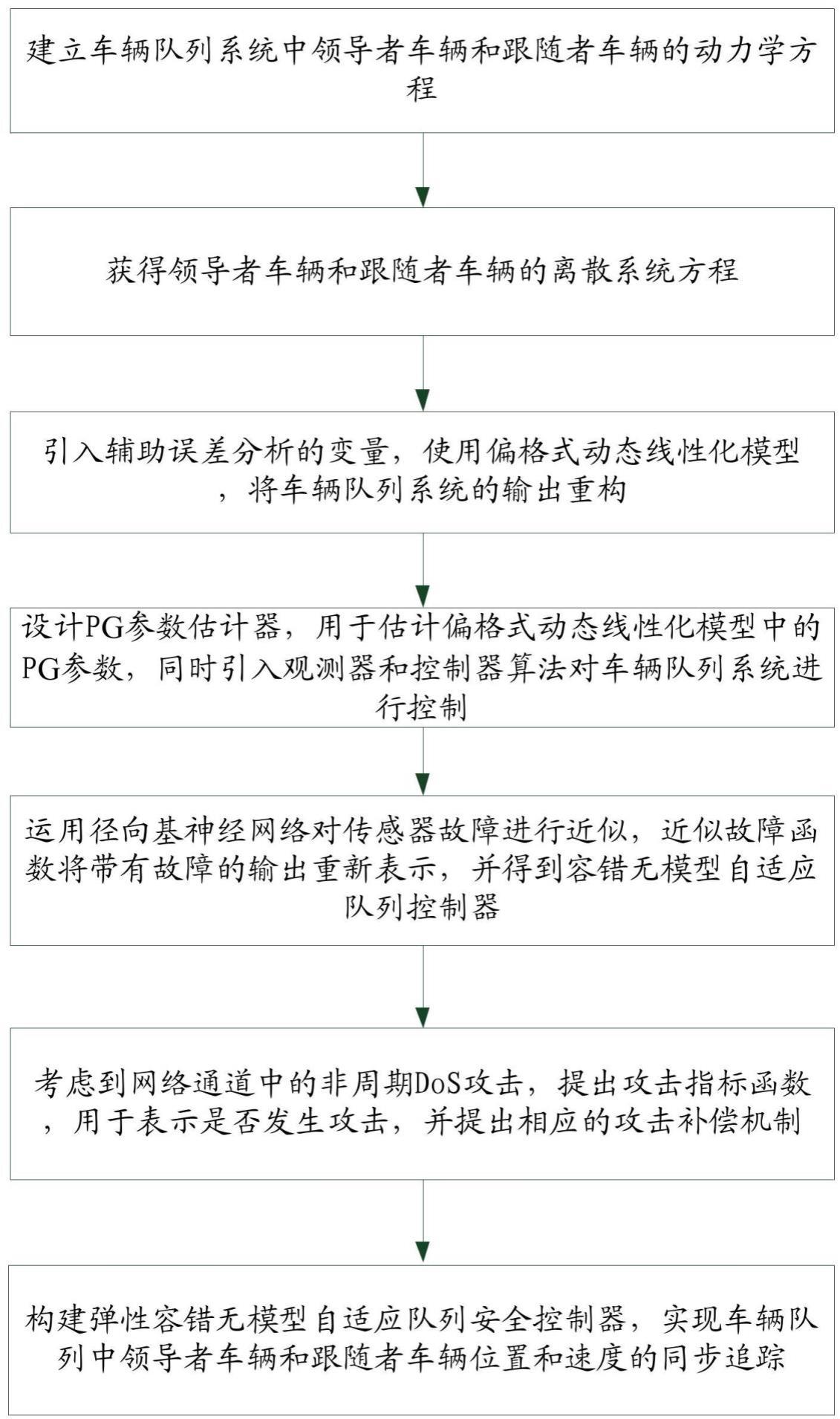
4、步骤1. 建立车辆队列系统中领导者车辆和跟随者车辆的动力学方程;
5、步骤2. 基于步骤1得到的动力学方程获得领导者车辆和跟随者车辆的离散系统方程;
6、步骤3. 在得到的领导者车辆和跟随者车辆的离散系统方程中,引入辅助误差分析的变量pg参数,使用偏格式动态线性化模型,将车辆队列系统的输出重构;
7、步骤4. 设计 pg参数估计器,用于估计偏格式动态线性化模型中的pg参数,同时引入观测器和控制器算法对车辆队列系统进行控制;
8、步骤5. 运用径向基神经网络对传感器故障进行近似,近似故障函数将带有故障的输出重新表示,并得到容错无模型自适应队列控制器;
9、步骤6. 在步骤5的基础上考虑到网络通道中的非周期dos攻击,提出一个攻击指标函数,用于表示是否发生攻击,并提出相应的攻击补偿机制;
10、步骤7. 结合步骤5和步骤6,构建弹性容错无模型自适应队列安全控制器,实现车辆队列系统中领导者车辆和跟随者车辆位置和速度的同步追踪。
11、此外,在数据驱动车辆队列容错跟踪控制追踪方法的基础上,本发明还提出了一种与之相适应的数据驱动车辆队列容错跟踪控制追踪系统,其采用如下技术方案:
12、一种数据驱动车辆队列容错跟踪控制追踪系统,包括:
13、动力学方程构建模块,用于建立车辆队列系统中领导者车辆和跟随者车辆的动力学方程;
14、离散系统方程构建模块,用于获得领导者车辆和跟随者车辆的离散系统方程;
15、系统输出重构模块,用于根据领导者车辆和跟随者车辆的离散系统方程中,引入辅助误差分析的变量pg参数,使用偏格式动态线性化模型,将车辆队列系统的输出重构;
16、系统模型参数求解模块,设计 pg参数估计器,用于估计偏格式动态线性化模型中的pg参数,同时引入观测器和控制器算法对车辆队列系统进行控制;
17、容错无模型自适应队列控制模块,用于根据径向基神经网络对传感器故障进行近似,近似故障函数将带有故障的输出重新表示,并得到容错无模型自适应队列控制器;
18、攻击补偿机制构建模块,用于根据网络通道中的非周期dos攻击,提出一个攻击指标函数,用于表示是否发生攻击,并提出相应的攻击补偿机制;
19、以及同步追踪控制模块,用于构建弹性容错无模型自适应队列安全控制器,实现车辆队列系统中跟随者车辆对领导者车辆的位置和速度的同步追踪控制。
20、此外,在上述数据驱动车辆队列容错跟踪控制追踪方法的基础上,本发明还提出了一种计算机设备,该计算机设备包括存储器和一个或多个处理器。
21、所述存储器中存储有可执行代码,所述处理器执行所述可执行代码时,用于实现上面述及的数据驱动车辆队列容错跟踪控制追踪方法的步骤。
22、此外,在上述数据驱动车辆队列容错跟踪控制追踪方法的基础上,本发明还提出了一种计算机可读存储介质,其上存储有程序。该程序被处理器执行时,用于实现上面述及的数据驱动车辆队列容错跟踪控制追踪方法的步骤。
23、与现有技术相比,本发明具有如下优点:
24、如上所述,本发明述及了一种数据驱动车辆队列容错跟踪控制追踪方法及系统。本发明针对传感器故障和dos攻击的实际非线性车辆队列系统,根据实际物理意义建立了偏格式动态线性化模型即pfdl模型,将复杂的非线性的车辆队列系统采用动态线性化技术转换成等效的pfdl模型,针对车辆队列中的传感器故障采用径向基函数神经网络方法对传感器故障进行逼近,并在此基础上最终建立了弹性容错无模型自适应队列安全控制器ft-mfapsc,针对网络通道中很有可能存在的非周期dos攻击问题,本发明提出了攻击补偿机制,解决了非周期性dos攻击下的车辆队列跟踪控制问题。本发明实现了车辆队列系统中领导者车辆和跟随者车辆位置和速度同步跟踪的目标。
技术特征:
1.一种数据驱动车辆队列容错跟踪控制追踪方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的数据驱动车辆队列容错跟踪控制追踪方法,其特征在于,
3.根据权利要求2所述的数据驱动车辆队列容错跟踪控制追踪方法,其特征在于,
4.根据权利要求3所述的数据驱动车辆队列容错跟踪控制追踪方法,其特征在于,
5.根据权利要求4所述的数据驱动车辆队列容错跟踪控制追踪方法,其特征在于,
6.根据权利要求5所述的数据驱动车辆队列容错跟踪控制追踪方法,其特征在于,
7.根据权利要求6所述的数据驱动车辆队列容错跟踪控制追踪方法,其特征在于,
8.根据权利要求7所述的数据驱动车辆队列容错跟踪控制追踪方法,其特征在于,
9.一种数据驱动车辆队列容错跟踪控制追踪系统,其特征在于,包括:
技术总结
本发明属于车辆队列控制技术领域,公开了一种数据驱动车辆队列容错跟踪控制追踪方法及系统。本发明针对传感器故障和DoS攻击的实际非线性车辆队列系统,建立了偏格式动态线性化模型即PFDL模型,将复杂的非线性的车辆队列系统采用动态线性化技术转换成等效的PFDL模型,针对车辆队列中的传感器故障采用径向基函数神经网络方法对传感器故障进行逼近,并在此基础上最终建立了弹性容错无模型自适应队列安全控制器,针对网络通道中很有可能存在的非周期DoS攻击问题,本发明提出了攻击补偿机制,解决了非周期性DoS攻击下的车辆队列跟踪控制问题。本发明实现了车辆队列系统中领导者车辆和跟随者车辆位置和速度同步跟踪的目标。
技术研发人员:车伟伟,朱琳,岳柏帆,金小峥
受保护的技术使用者:青岛大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!