一种移动无人机机巢及无人机起飞控制方法与流程
本发明涉及电力无人机,特别涉及一种移动无人机机巢及无人机起飞控制方法。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术,并不必然构成现有技术。
2、目前,无人机巡检重点针对的是无人机安全策略类设计,包含航线规划、自主飞行、精准降落等过程,相对于固定式机巢而言,以上关注点基本满足生产经营过程中的需求,但对于移动机巢产品来说,无人机降落点(回中点)不一定是最佳的起飞点。
3、发明人发现,现有的移动无人机机巢存在如下问题:
4、(1)现有机巢产品大多选用杆式回中,通过复位杆刚性对无人机进行复位回中,刚性碰撞的力量较大,对固定式机巢不易产生影响,但是移动无人机机巢处于移动的车辆上,较大的碰撞力量容易引起起飞位置或者角度的偏差;
5、(2)移动机巢的运载车辆在停车执行巡检任务过程中,驾驶作业人员会选择将车辆停在相对空旷区域,由于机巢设备处于后方车斗区域内,驾驶人员在车辆内缺乏机巢上方视角空间,由于巡检线路的复杂性,起降平台上方难免部分区域会存在树枝树叶、路灯等障碍物的遮挡,无法完全保证机巢舱门打开后无人机起飞环境的安全性。
技术实现思路
1、为了解决现有技术的不足,本发明提供了一种移动无人机机巢及无人机起飞控制方法,采用磁吸的方式进行无人机位置移动,选择最佳的起飞区域进行起飞,保证了无人机起飞的安全性。
2、为了实现上述目的,本发明采用如下技术方案:
3、本发明第一方面提供了一种移动无人机机巢。
4、一种移动无人机机巢,包括:起降平台以及位于起降平台上的电磁吸附组件和磁吸脚架;
5、磁吸脚架用于与无人机连接,磁吸脚架用于在电磁吸附组件配合下移动。
6、作为本发明第一方面进一步的限定,电磁吸附组件包括沿第一方向布置且相互平行的第一杆件和第二杆件以及沿第二方向布置的相互平行的第三杆件和第四杆件,第一方向与第二方向垂直;
7、第一杆件、第二杆件、第三杆件和第四杆件上均布置有用于产生磁吸力的线圈。
8、作为本发明第一方面更进一步的限定,磁吸脚架位于第一杆件和第二杆件之间,且磁吸脚架位于第三杆件和第四杆件之间。
9、作为本发明第一方面进一步的限定,起降平台的边沿布置有多个超声传感器,起降平台上布置有至少一个风速传感器。
10、作为本发明第一方面进一步的限定,起降平台上布置有至少一个用于监测起飞区域的摄像装置。
11、本发明第二方面提供了一种多源传感融合的无人机起飞控制方法。
12、一种多源传感融合的无人机起飞控制方法,利用本发明第一方面所述的无人机机巢,包括以下过程:
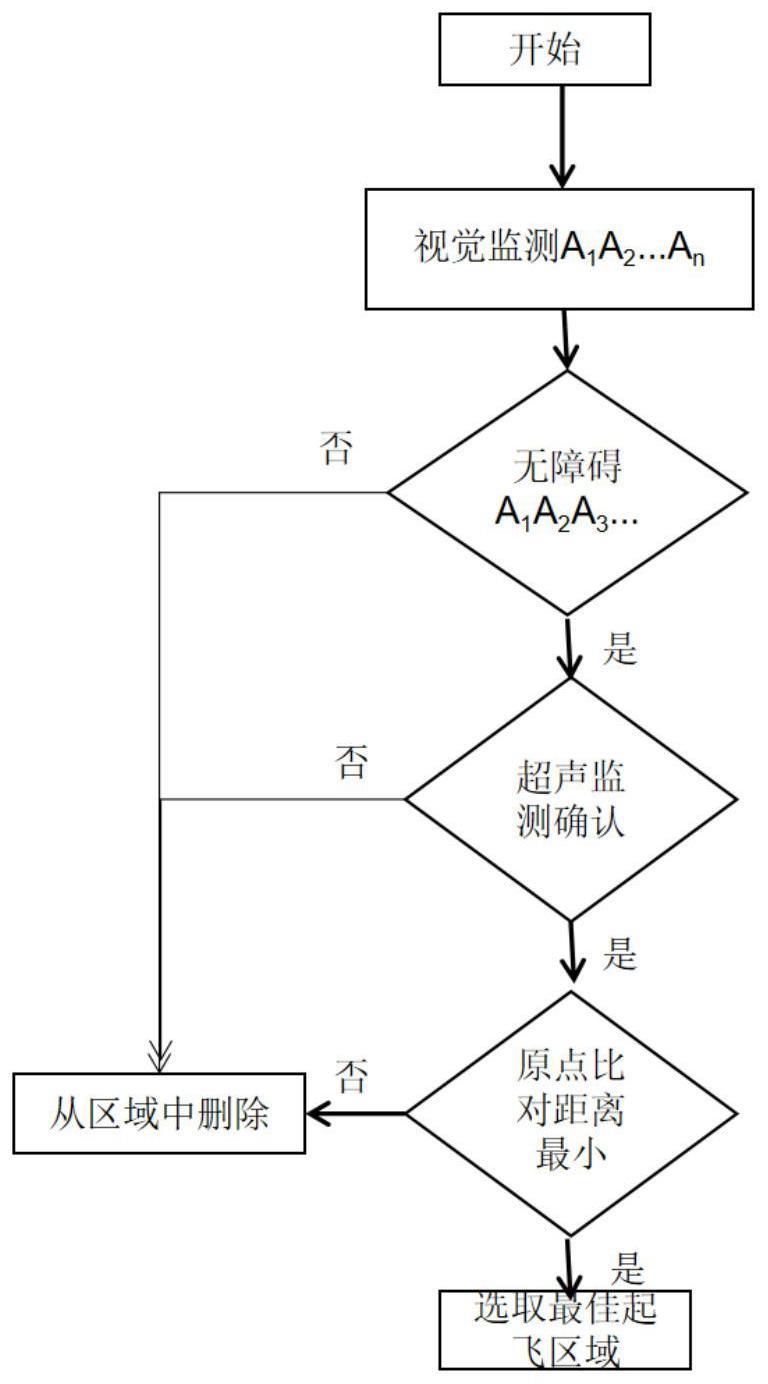
13、根据获取的无人机上方设定区域的图像数据,确定多个无障碍子区域;
14、根据获取的多个无障碍子区域的超声数据,得到多个经核实后的无障碍子区域;
15、获取多个经核实后的无障碍子区域的中心点在起降平台上的投影点,以距离当前无人机中心点距离最小的投影点所在区域为起飞区域;
16、通过电磁吸附组件和磁吸脚架的配合,将无人机移动至起飞区域以控制无人机起飞。
17、作为本发明第二方面进一步的限定,将无人机移动至起飞区域之前,判断当前风速是否大于设定阈值,如是,则不移动无人机且不起飞;如否,则将无人机移动至起飞区域以控制无人机起飞。
18、作为本发明第二方面进一步的限定,根据获取的无人机上方设定区域的图像数据,确定多个无障碍子区域,包括:
19、根据获取的无人机上方设定区域的图像数据,进行区域划分,得到多个子区域;
20、查找每个子区域附近的多个临近特征点,得到当前子区域的最近障碍物距离;
21、根据各子区域的最近障碍物距离进行代价分配,对任一子区域,当临近特征点的数量低于临近特征点数量临界值,或者,区域代价值小于区域代价值临界值时,判定此子区域无障碍物。
22、作为本发明第二方面更进一步的限定,采用pnp算法进行区域划分,利用kd-tree查找每个子区域附近的多个临近特征点。
23、作为本发明第二方面进一步的限定,根据获取的多个无障碍子区域的超声数据,得到多个经核实后的无障碍子区域,包括:
24、对多个无障碍子区域的超声数据,采用模糊网格算法进行各个子区域的判定,判定确定无障碍后,得到多个经核实后的无障碍子区域。
25、与现有技术相比,本发明的有益效果是:
26、1、本发明创新性的研制了一种移动无人机机巢,布置有视觉摄像装置、超声波传感器、风速传感器等多种传感器,实现了移动无人机机巢的上方起飞区域的更全面监测,采用电磁吸附的方式,实现了无人机快速和稳定的移动到起飞区域,保证了无人机的起飞安全。
27、2、本发明创新性的提出了一种多源传感融合的无人机起飞控制方法,对无人机机巢的上方区域进行划分,对每个区域进行障碍物判断,进而根据与无人机原始位置的距离判断最佳的起飞区域,结合风速信息,提高了起飞的安全性和稳定性,避免了障碍物对无人机起飞的影响。
技术特征:
1.一种移动无人机机巢,其特征在于,
2.如权利要求1所述的移动无人机机巢,其特征在于,
3.如权利要求2所述的移动无人机机巢,其特征在于,
4.如权利要求1-3任一项所述的移动无人机机巢,其特征在于,
5.如权利要求1-3任一项所述的移动无人机机巢,其特征在于,
6.一种多源传感融合的无人机起飞控制方法,其特征在于,利用权利要求1-5任一项所述的移动无人机机巢,包括以下过程:
7.如权利要求6所述的多源传感融合的无人机起飞控制方法,其特征在于,
8.如权利要求6所述的多源传感融合的无人机起飞控制方法,其特征在于,
9.如权利要求8所述的多源传感融合的无人机起飞控制方法,其特征在于,
10.如权利要求6所述的多源传感融合的无人机起飞控制方法,其特征在于,
技术总结
本发明提供了一种移动无人机机巢及多源传感融合的无人机起飞控制方法。所述移动无人机机巢,包括:起降平台以及位于起降平台上的电磁吸附组件和磁吸脚架;磁吸脚架用于与无人机连接,磁吸脚架用于在电磁吸附组件配合下移动。所述方法,包括:根据获取的无人机上方设定区域的图像数据,确定多个无障碍子区域;根据获取的多个无障碍子区域的超声数据,得到多个经核实后的无障碍子区域;获取多个经核实后的无障碍子区域的中心点在起降平台上的投影点,以距离当前无人机中心点距离最小的投影点所在区域为起飞区域;通过电磁吸附组件和磁吸脚架的配合,将无人机移动至起飞区域以控制无人机起飞;本发明保证了无人机起飞的安全性和稳定性。
技术研发人员:孙磊,刘天立,刘俍,崔其会,左新斌,张飞,徐金琨,杨朝,董庆,姜可孟,杨晓伟,苑雨薇,王景武
受保护的技术使用者:国网智能科技股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!