基于轻量级卷积神经网络的舵机控制与诊断方法、装置与流程
本申请涉及舵机操控,尤其涉及一种基于轻量级卷积神经网络的舵机控制与诊断方法、装置。
背景技术:
1、舵机是一种在驾驶仪的操纵面转动的执行部件,舵机作为一种位置(角度)伺服的驱动器,适用于一些需要角度不断变化并可以保持的控制系统,在船舶、航天方面被广泛应用。
2、在舵机操纵控制系统中,由于舵机实际工作情况存在复杂动态的情况,舵机运动信号会存在信号噪声大、多层干扰叠加等问题,从而根据获取的舵机运动信号对舵机进行控制的精确性较低,并且,由于舵机自身及周围振源较多,导致舵机故障对应的振动分量被较强的非高斯噪声干扰信号覆盖,从而导致故障诊断的准确性较低;此外,由于舵机操纵控制系统受限于舵机尺寸,且边缘设备算力相对较低、可利用内存资源相对较少,使得对算法部署的实时性能要求严苛。
3、因此,如何实现舵机的高精度、实时智能控制与诊断是本领域技术人员亟需解决的问题。
技术实现思路
1、本申请的主要目的在于提供一种基于轻量级卷积神经网络的舵机控制与诊断方法、装置,至少能够解决相关技术中舵机的控制及故障诊断准确性较低的问题。
2、为实现上述目的,本申请第一方面提供了一种基于轻量级卷积神经网络的舵机控制与诊断方法,该方法包括:
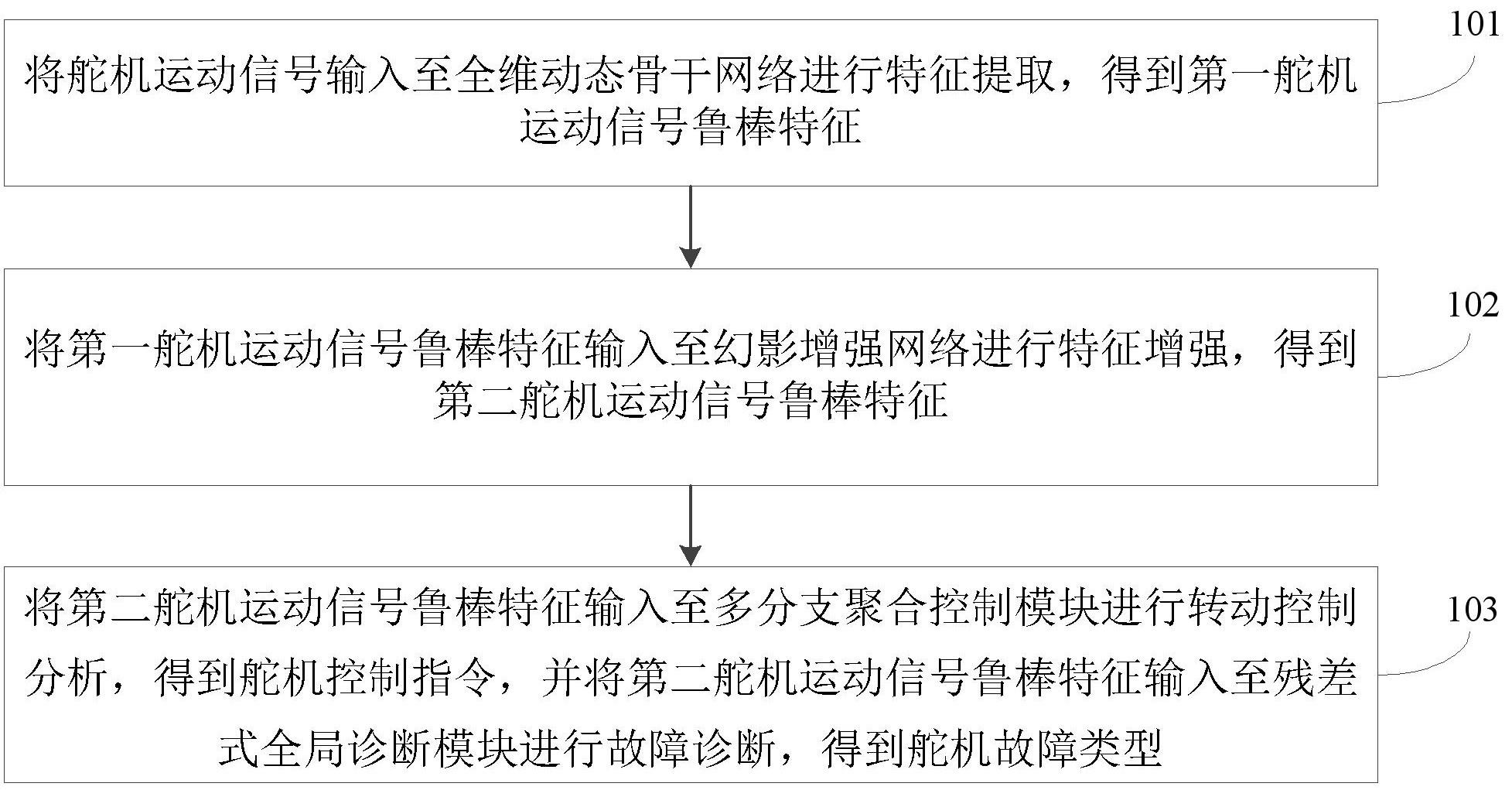
3、将舵机运动信号输入至全维动态骨干网络进行特征提取,得到第一舵机运动信号鲁棒特征;
4、将所述第一舵机运动信号鲁棒特征输入至幻影增强网络进行特征增强,得到第二舵机运动信号鲁棒特征;
5、将所述第二舵机运动信号鲁棒特征输入至多分支聚合控制模块进行转动控制分析,得到舵机控制指令,并将所述第二舵机运动信号鲁棒特征输入至残差式全局诊断模块进行故障诊断,得到舵机故障类型。
6、本申请第二方面提供了一种基于边缘计算的工业级舵机边缘智能处理装置,包括:存储器及处理器,其中,处理器用于执行存储在存储器上的计算机程序,处理器执行计算机程序时,实现上述本申请第一方面提供的基于轻量级卷积神经网络的舵机控制与诊断方法中的各步骤。
7、本申请第三方面提供了一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时,实现上述本申请第一方面提供的基于轻量级卷积神经网络的舵机控制与诊断方法中的各步骤。
8、由上可见,根据本申请方案所提供的基于轻量级卷积神经网络的舵机控制与诊断方法、装置,将舵机运动信号输入至全维动态骨干网络进行特征提取,得到第一舵机运动信号鲁棒特征;将第一舵机运动信号鲁棒特征输入至幻影增强网络进行特征增强,得到第二舵机运动信号鲁棒特征;将第二舵机运动信号鲁棒特征输入至多分支聚合控制模块进行转动控制分析,得到舵机控制指令,并将第二舵机运动信号鲁棒特征输入至残差式全局诊断模块进行故障诊断,得到舵机故障类型。通过本申请方案的实施,将给定的舵机输入信号经由全维动态骨干网络进行特征提取,再经幻影增强网络进行特征增强后得到舵机输入信号鲁棒特征,通过卷积神经网络的复杂映射表征能力挖掘信号隐含特征,以进行通道和信号维度上的动态特征提取与增强,再分别进行转动控制分析和故障诊断得到控制指令和故障类型,有效实现舵机鲁棒控制及精确故障判别。
技术特征:
1.一种基于轻量级卷积神经网络的舵机控制与诊断方法,其特征在于,包括:
2.根据权利要求1所述的舵机控制与诊断方法,其特征在于,所述全维动态骨干网络包括多个网络单元,各所述网络单元均包括全维动态幻影卷积层、第一激活函数以及长度-通道转换层;其中,所述全维动态幻影卷积层为包括幻影卷积、全维动态卷积和恒等映射的卷积层;
3.根据权利要求1所述的舵机控制与诊断方法,其特征在于,所述幻影增强网络包括正则化层、多个递归层、第一幻影自注意力模块以及多层感知机;
4.根据权利要求3所述的舵机控制与诊断方法,其特征在于,各所述递归层均包括第二幻影自注意力模块以及自适应加权融合模块;
5.根据权利要求4所述的舵机控制与诊断方法,其特征在于,幻影注意力模块包括线性层、全维动态幻影卷积层、相似度操作层以及归一化操作层;
6.根据权利要求4所述的舵机控制与诊断方法,其特征在于,所述自适应加权融合模块包括平均池化层、最大池化层、通道维度上连接操作层、卷积层、全维动态幻影卷积层;
7.根据权利要求1所述的舵机控制与诊断方法,其特征在于,所述多分支聚合控制模块包括多个全连接层、全维动态幻影卷积层、多个卷积层、聚合操作层以及第二激活函数;
8.根据权利要求1所述的舵机控制与诊断方法,其特征在于,所述残差式全局诊断模块包括全维动态幻影卷积层、全局平均池化层、全局最大池化层、全连接层、通道维度上连接操作层、第三激活函数以及卷积层;
9.一种基于边缘计算的工业级舵机边缘智能处理装置,其特征在于,包括存储器及处理器,其中:
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时,实现权利要求1至8中的任意一项所述基于轻量级卷积神经网络的舵机控制与诊断方法中的步骤。
技术总结
本申请提供了一种基于轻量级卷积神经网络的舵机控制与诊断方法、装置。所述方法包括:将舵机运动信号输入至全维动态骨干网络进行特征提取,得到第一鲁棒特征;将第一鲁棒特征输入至幻影增强网络进行特征增强,得到第二鲁棒特征;将第二鲁棒特征输入至多分支聚合控制模块进行转动控制分析,得到舵机控制指令,并将第二鲁棒特征输入至残差式全局诊断模块进行故障诊断,得到舵机故障类型。通过本申请方案的实施,利用卷积神经网络的复杂映射表征能力挖掘信号隐含特征,以进行通道和信号维度上的动态特征提取与增强,再分别进行转动控制分析和故障诊断得到控制指令和故障类型,从而有效实现舵机鲁棒控制及精确故障判别。
技术研发人员:曹恒胜,路振旺,左浩博
受保护的技术使用者:深圳市瓴鹰智能科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!