一种机枪武器站冲击扰动抑制方法、装置及武器站与流程
本文属于武器,具体涉及一种机枪武器站冲击扰动抑制方法、装置及武器站。
背景技术:
1、武器站是可配置多种武器和不同武器组合的模块化武器系统,具备目标搜索、瞄准和射击的遥控操作功能,可安装在多种军用车辆平台上,主要配置各种中、小口径机枪、自动榴弹发射器、反坦克导弹等武器。
2、机枪武器站系统中,机枪在射击时产生的冲击力矩扰动对系统俯仰轴方向的角位置影响较大,目前常用的pid控制对其抑制能力有限,面临恢复时间长、角度偏离大的问题,影响了系统连续精确射击的能力。
技术实现思路
1、针对现有技术的上述问题,本文的目的在于,提供一种机枪武器站冲击扰动抑制方法、装置及武器站,可以提高武器站系统中机枪连续射击的准确性。
2、为了解决上述技术问题,本文的具体技术方案如下:
3、一方面,本文提供一种机枪武器站冲击扰动抑制方法,所述方法包括:
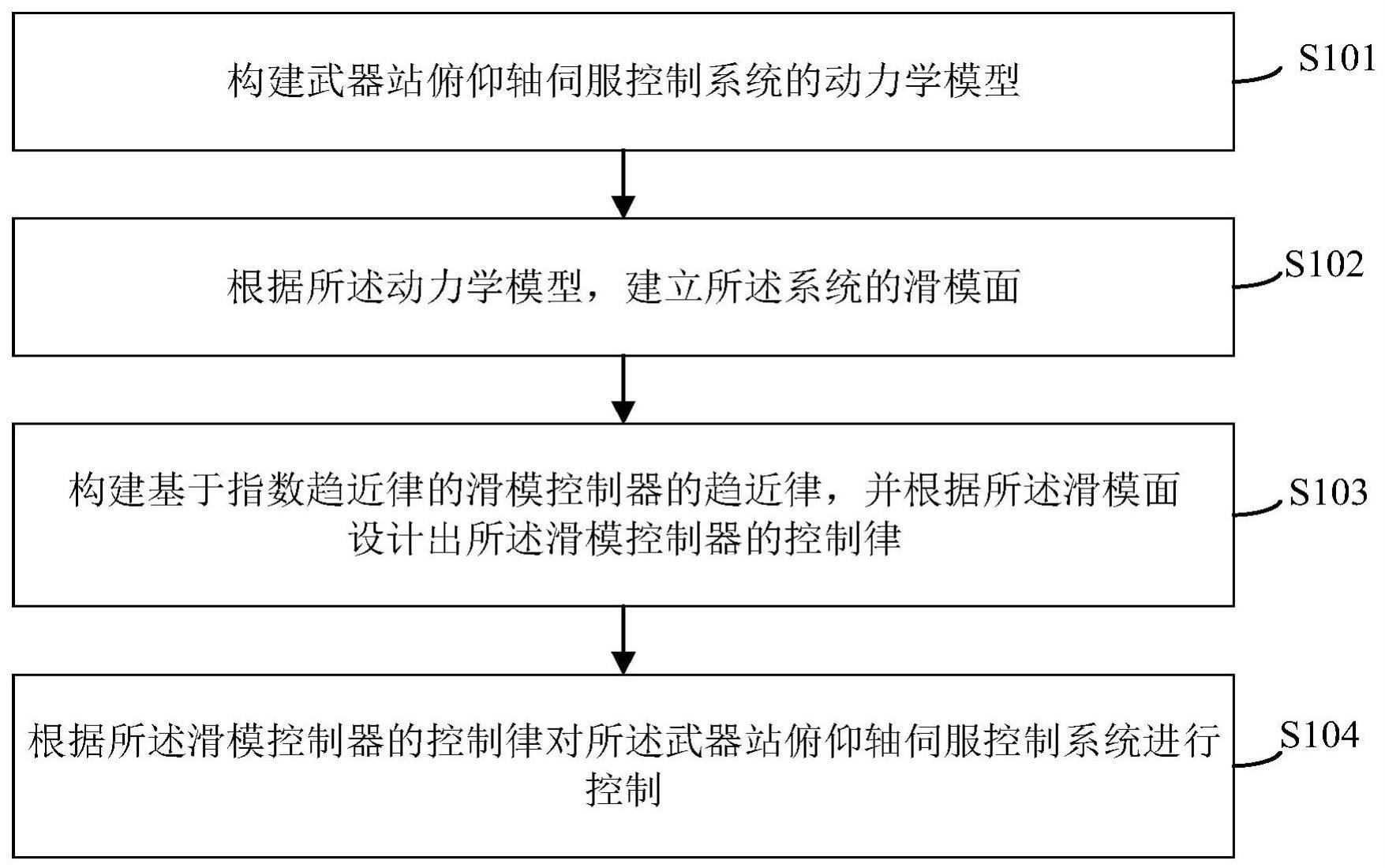
4、构建武器站俯仰轴伺服控制系统的动力学模型;
5、根据所述动力学模型,建立所述系统的滑模面;
6、构建基于指数趋近律的滑模控制器的趋近律,并根据所述滑模面设计出所述滑模控制器的控制律;
7、根据所述滑模控制器的控制律对所述武器站俯仰轴伺服控制系统进行控制。
8、进一步地,构建武器站俯仰轴伺服控制系统的动力学模型,包括:
9、
10、其中,x1为武器站俯仰轴的角位置,x2为俯仰轴的角速度,y为系统的输出,u为控制器的输入,f(x1,x2)为武器站俯仰轴机械部分结构的动力学模型,d(t)为系统的冲击力矩扰动。
11、进一步地,根据所述动力学模型,建立所述系统的滑模面,包括:
12、确定系统的跟踪误差及跟踪误差的变化率,表示为:
13、xd为系统的目标指令,x1为系统的实际角位置,e为系统的跟踪误差及为误差的变化率;
14、根据系统的跟踪误差及跟踪误差的变化率,确定系统的滑模面函数,表示为:其中滑模面参数c>0,以满足hurwitz条件;
15、根据系统的所述动力学模型,对所述滑模面函数进行求导整理,得到所述系统的滑模面函数的导数,表示为:
16、进一步地,构建基于指数趋近律的滑模控制器的趋近律,并根据所述滑模面设计出所述滑模控制器的控制律,包括:
17、构建基于指数趋近律的滑模控制器的趋近律,表示为:
18、根据所述系统的滑模面函数的导数和所述滑模控制器的趋近律,得到所述滑模控制器的控制律,表示为:
19、进一步地,所述方法还包括:
20、确定所述冲击力矩扰动的上下限,表示为:dl≤|d(t)|≤du;
21、根据所述冲击力矩扰动的上下限,设计所述冲击力矩扰动的替代值,表示为:
22、进一步地,所述方法还包括:
23、根据所述冲击力矩扰动的替代值,对所述滑模控制器的控制律进行优化,得到目标控制律,表示为:或是,
24、另一方面,本文还提供一种机枪武器站冲击扰动抑制装置,所述装置包括:
25、动力学模型构建模块,用于构建武器站俯仰轴伺服控制系统的动力学模型;
26、滑模面建立模块,用于根据所述动力学模型,建立所述系统的滑模面;
27、控制律设计模块,用于构建基于指数趋近律的滑模控制器的趋近律,并根据所述滑模面设计出所述滑模控制器的控制律;
28、控制模块,用于根据所述滑模控制器的控制律对所述武器站俯仰轴伺服控制系统进行控制。
29、另一方面,本文还提供一种武器站,所述武器站包括上述所述的装置。
30、另一方面,本文还提供一种武器站,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述所述的方法。
31、最后,本文还提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上述所述的方法。
32、采用上述技术方案,本文所述的一种机枪武器站冲击扰动抑制方法,所述方法包括:构建武器站俯仰轴伺服控制系统的动力学模型;根据所述动力学模型,建立所述系统的滑模面;构建基于指数趋近律的滑模控制器的趋近律,并根据所述滑模面设计出所述滑模控制器的控制律;根据所述滑模控制器的控制律对所述武器站俯仰轴伺服控制系统进行控制,本文提供的技术方案可以提高武器站系统中机枪连续射击的准确性。
33、为让本文的上述和其他目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附图式,作详细说明如下。
技术特征:
1.一种机枪武器站冲击扰动抑制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,构建武器站俯仰轴伺服控制系统的动力学模型,包括:
3.根据权利要求1所述的方法,其特征在于,根据所述动力学模型,建立所述系统的滑模面,包括:
4.根据权利要求3所述的方法,其特征在于,构建基于指数趋近律的滑模控制器的趋近律,并根据所述滑模面设计出所述滑模控制器的控制律,包括:
5.根据权利要求4所述的方法,其特征在于,所述方法还包括:
6.根据权利要求5所述的方法,其特征在于,所述方法还包括:
7.一种机枪武器站冲击扰动抑制装置,其特征在于,所述装置包括:
8.一种武器站,其特征在于,所述武器站包括权利要求7所述的装置。
9.一种武器站,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至6任一项所述的方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述的方法。
技术总结
本文提供了一种机枪武器站冲击扰动抑制方法、装置及武器站,所述方法包括:构建武器站俯仰轴伺服控制系统的动力学模型;根据所述动力学模型,建立所述系统的滑模面;构建基于指数趋近律的滑模控制器的趋近律,并根据所述滑模面设计出所述滑模控制器的控制律;根据所述滑模控制器的控制律对所述武器站俯仰轴伺服控制系统进行控制,本文提供的技术方案可以提高武器站系统中机枪连续射击的准确性。
技术研发人员:高旭黎,陈泽宇,胡文俊
受保护的技术使用者:湖南兵器资江机器有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!