一种飞行包线环境下航空器稳定控制方法、系统及介质与流程
本申请涉及航空器飞行状态切换领域,具体而言,涉及一种飞行包线环境下航空器稳定控制方法、系统及介质。
背景技术:
1、随着科学技术的不断发展,无人驾驶航空器的应用得到了空前的发展,航空器往往更适合一些重复机械性任务,或者危险性高的任务,飞行包线,是指以飞行速度、高度、过载、环境温度等参数为坐标,表示飞机飞行范围和飞机使用限制条件的封闭几何图形。现有的航空器无法通过对航空器飞行姿态进行解算,进行精准判断航空器飞行姿态偏差,进而无法进行精准的控制航空器飞行姿态与飞行控制精度,针对上述问题,目前亟待有效的技术解决方案。
技术实现思路
1、本申请实施例的目的在于提供一种飞行包线环境下航空器稳定控制方法、系统及介质,可以通过对航空器飞行姿态进行解算,进行精准判断航空器飞行姿态偏差,从而可以对航空器飞行稳定性进行智能控制,提高控制精度。
2、本申请实施例还提供了一种飞行包线环境下航空器稳定控制方法,包括:
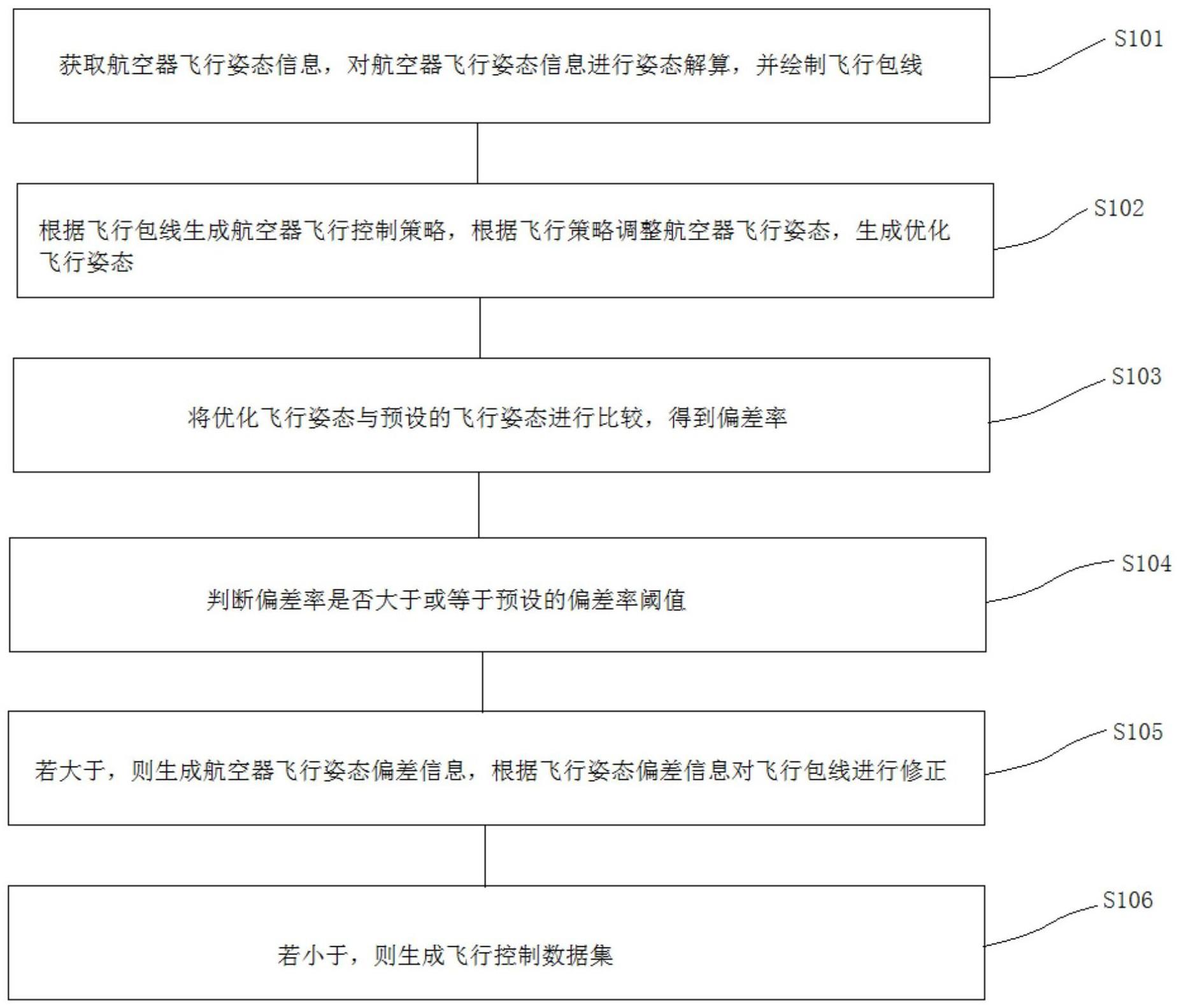
3、获取航空器飞行姿态信息,对航空器飞行姿态信息进行姿态解算,并绘制飞行包线;
4、根据飞行包线生成航空器飞行控制策略,根据飞行策略调整航空器飞行姿态,生成优化飞行姿态;
5、将优化飞行姿态与预设的飞行姿态进行比较,得到偏差率;
6、判断所述偏差率是否大于或等于预设的偏差率阈值;
7、若大于,则生成航空器飞行姿态偏差信息,根据飞行姿态偏差信息对飞行包线进行修正;
8、若小于,则生成飞行控制数据集。
9、可选地,在本申请实施例所述的飞行包线环境下航空器稳定控制方法中,获取航空器飞行姿态信息,对航空器飞行姿态信息进行姿态解算,并绘制飞行包线,包括:
10、获取航空器飞行姿态信息,将航空器飞行姿态信息进行解算,生成航空器坐标;
11、获取飞行空间坐标,将航空器坐标进行转换生成航空器空间坐标;
12、根据航空器空间坐标计算航空器飞行参数,并建立航空器飞行包线;
13、其中航空器飞行参数包括航空器飞行高度、航空器飞行速度、航空器飞行角度。
14、可选地,在本申请实施例所述的飞行包线环境下航空器稳定控制方法中,所述飞行包线包括平飞速度包线、速度过载包线与飞行高度与环境温度包线;
15、所述平飞速度包线通过航空器飞行速度作为横坐标,以航空器飞行高度作为纵坐标,将不同飞行高度下的速度上限和下限进行描述,构成边界线。
16、可选地,在本申请实施例所述的飞行包线环境下航空器稳定控制方法中,获取航空器飞行速度,将航空器飞行速度与预设的飞行速度进行差值计算,得到速度差值;
17、当速度差值大于第一阈值且小于第二阈值时,生成第一速度过载量,根据第一速度过载量生成第一速度修正信息,根据第一修正信息费航空器飞行稳定进行调整。
18、当速度差值大于第二阈值时,生成第二速度过载量,根据第二速度过载量生成第二速度修正信息,根据第二修正信息对航空器飞行稳定进行调整。
19、可选地,在本申请实施例所述的飞行包线环境下航空器稳定控制方法中,获取航空器飞行角度,将航空器飞行角度与预设的飞行角度进行比较,得到角度偏差率;
20、判断所述角度偏差率是否大于或等于预设的偏差率阈值;
21、若大于或等于,则生成角度修正信息,根据角度修正信息对航空器的飞行角度进行调整;
22、若小于,则航空器按照当前飞行角度进行飞行。
23、可选地,在本申请实施例所述的飞行包线环境下航空器稳定控制方法中,获取气象信息,根据气象信息生成气流干扰信息;
24、根据气流干扰信息生成飞行角度干扰信息;
25、根据飞行角度干扰信息生成航空器飞行角度偏离叠加值;
26、根据角度偏离叠加值对飞行包线进行修正。
27、第二方面,本申请实施例提供了一种飞行包线环境下航空器稳定控制系统,该系统包括:存储器及处理器,所述存储器中包括飞行包线环境下航空器稳定控制方法的程序,所述飞行包线环境下航空器稳定控制方法的程序被所述处理器执行时实现以下步骤:
28、获取航空器飞行姿态信息,对航空器飞行姿态信息进行姿态解算,并绘制飞行包线;
29、根据飞行包线生成航空器飞行控制策略,根据飞行策略调整航空器飞行姿态,生成优化飞行姿态;
30、将优化飞行姿态与预设的飞行姿态进行比较,得到偏差率;
31、判断所述偏差率是否大于或等于预设的偏差率阈值;
32、若大于,则生成航空器飞行姿态偏差信息,根据飞行姿态偏差信息对飞行包线进行修正;
33、若小于,则生成飞行控制数据集。
34、可选地,在本申请实施例所述的飞行包线环境下航空器稳定控制系统中,获取航空器飞行姿态信息,对航空器飞行姿态信息进行姿态解算,并绘制飞行包线,包括:
35、获取航空器飞行姿态信息,将航空器飞行姿态信息进行解算,生成航空器坐标;
36、获取飞行空间坐标,将航空器坐标进行转换生成航空器空间坐标;
37、根据航空器空间坐标计算航空器飞行参数,并建立航空器飞行包线;
38、其中航空器飞行参数包括航空器飞行高度、航空器飞行速度、航空器飞行角度。
39、可选地,在本申请实施例所述的飞行包线环境下航空器稳定控制系统中,所述飞行包线包括平飞速度包线、速度过载包线与飞行高度与环境温度包线;
40、所述平飞速度包线通过航空器飞行速度作为横坐标,以航空器飞行高度作为纵坐标,将不同飞行高度下的速度上限和下限进行描述,构成边界线。
41、第三方面,本申请实施例还提供了一种计算机可读存储介质,所述计算机可读存储介质中包括飞行包线环境下航空器稳定控制方法程序,所述飞行包线环境下航空器稳定控制方法程序被处理器执行时,实现如上述任一项所述的飞行包线环境下航空器稳定控制方法的步骤。
42、由上可知,本申请实施例提供的一种飞行包线环境下航空器稳定控制方法、系统及介质,通过获取航空器飞行姿态信息,对航空器飞行姿态信息进行姿态解算,并绘制飞行包线;根据飞行包线生成航空器飞行控制策略,根据飞行策略调整航空器飞行姿态,生成优化飞行姿态;将优化飞行姿态与预设的飞行姿态进行比较,得到偏差率;判断所述偏差率是否大于或等于预设的偏差率阈值;若大于,则生成航空器飞行姿态偏差信息,根据飞行姿态偏差信息对飞行包线进行修正;若小于,则生成飞行控制数据集;通过对航空器飞行姿态进行解算,进行精准判断航空器飞行姿态偏差,从而可以对航空器飞行稳定性进行智能控制,提高控制精度的技术。
43、本申请的其他特征和优点将在随后的说明书阐述,并且,本申请的优点部分地从说明书中变得显而易见,或者通过实施本申请实施例了解。本申请的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
技术特征:
1.一种飞行包线环境下航空器稳定控制方法,其特征在于,包括:
2.根据权利要求1所述的飞行包线环境下航空器稳定控制方法,其特征在于,获取航空器飞行姿态信息,对航空器飞行姿态信息进行姿态解算,并绘制飞行包线,包括:
3.根据权利要求2所述的飞行包线环境下航空器稳定控制方法,其特征在于,所述飞行包线包括平飞速度包线、速度过载包线与飞行高度与环境温度包线;
4.根据权利要求3所述的飞行包线环境下航空器稳定控制方法,其特征在于,获取航空器飞行速度,将航空器飞行速度与预设的飞行速度进行差值计算,得到速度差值;
5.根据权利要求4所述的飞行包线环境下航空器稳定控制方法,其特征在于,获取航空器飞行角度,将航空器飞行角度与预设的飞行角度进行比较,得到角度偏差率;
6.根据权利要求5所述的飞行包线环境下航空器稳定控制方法,其特征在于,获取气象信息,根据气象信息生成气流干扰信息;
7.一种飞行包线环境下航空器稳定控制系统,其特征在于,该系统包括:存储器及处理器,所述存储器中包括飞行包线环境下航空器稳定控制方法的程序,所述飞行包线环境下航空器稳定控制方法的程序被所述处理器执行时实现以下步骤:
8.根据权利要求7所述的飞行包线环境下航空器稳定控制系统,其特征在于,获取航空器飞行姿态信息,对航空器飞行姿态信息进行姿态解算,并绘制飞行包线,包括:
9.根据权利要求8所述的飞行包线环境下航空器稳定控制系统,其特征在于,所述飞行包线包括平飞速度包线、速度过载包线与飞行高度与环境温度包线;
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中包括飞行包线环境下航空器稳定控制方法程序,所述飞行包线环境下航空器稳定控制方法程序被处理器执行时,实现如权利要求1至6中任一项所述的飞行包线环境下航空器稳定控制方法的步骤。
技术总结
本申请实施例提供了一种飞行包线环境下航空器稳定控制方法、系统及介质,该方法包括:获取航空器飞行姿态信息,对航空器飞行姿态信息进行姿态解算,并绘制飞行包线;根据飞行包线生成航空器飞行控制策略,根据飞行策略调整航空器飞行姿态,生成优化飞行姿态;将优化飞行姿态与预设的飞行姿态进行比较,得到偏差率;判断所述偏差率是否大于或等于预设的偏差率阈值;若大于,则生成航空器飞行姿态偏差信息,根据飞行姿态偏差信息对飞行包线进行修正;若小于,则生成飞行控制数据集;通过对航空器飞行姿态进行解算,进行精准判断航空器飞行姿态偏差,从而可以对航空器飞行稳定性进行智能控制,提高控制精度。
技术研发人员:胡华智,繆志豪
受保护的技术使用者:亿航智能设备(广州)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!