路径规划方法、计算设备、装置、设备及介质与流程
本公开涉及人工智能领域,尤其涉及路径规划方法、计算设备、装置、设备及介质。
背景技术:
1、智能机器人已经渗透到人类生活的方方面面,用于在室内或者室外场景中服务人类,执行任务;然而对于智能机器人而言,路径规划是所述智能机器人在一定环境中完成既定任务的基础。目前,智能机器人根据路径规划算法在环境中规划出一条从源地址至目的地址的最优路径,智能机器人在根据该最优路径移动的过程,往往容易出现位置偏差,导致无法按照规划的最优路径执行任务。极大的削弱了智能机器人的作业能力以及风险管控能力,因此,当智能机器人在移动至目的地址的过程中出现位置偏差时,及时调整位置、规划路径成为本领域技术人员亟待解决的技术问题。
技术实现思路
1、有鉴于此,本公开实施例提供了一种路径规划方法、计算设备、装置、设备及介质,以解决现有技术中智能机器人移动至目的地过程中出现位置偏差时难以重新调整位置,规划路径移动至目的地址的问题。
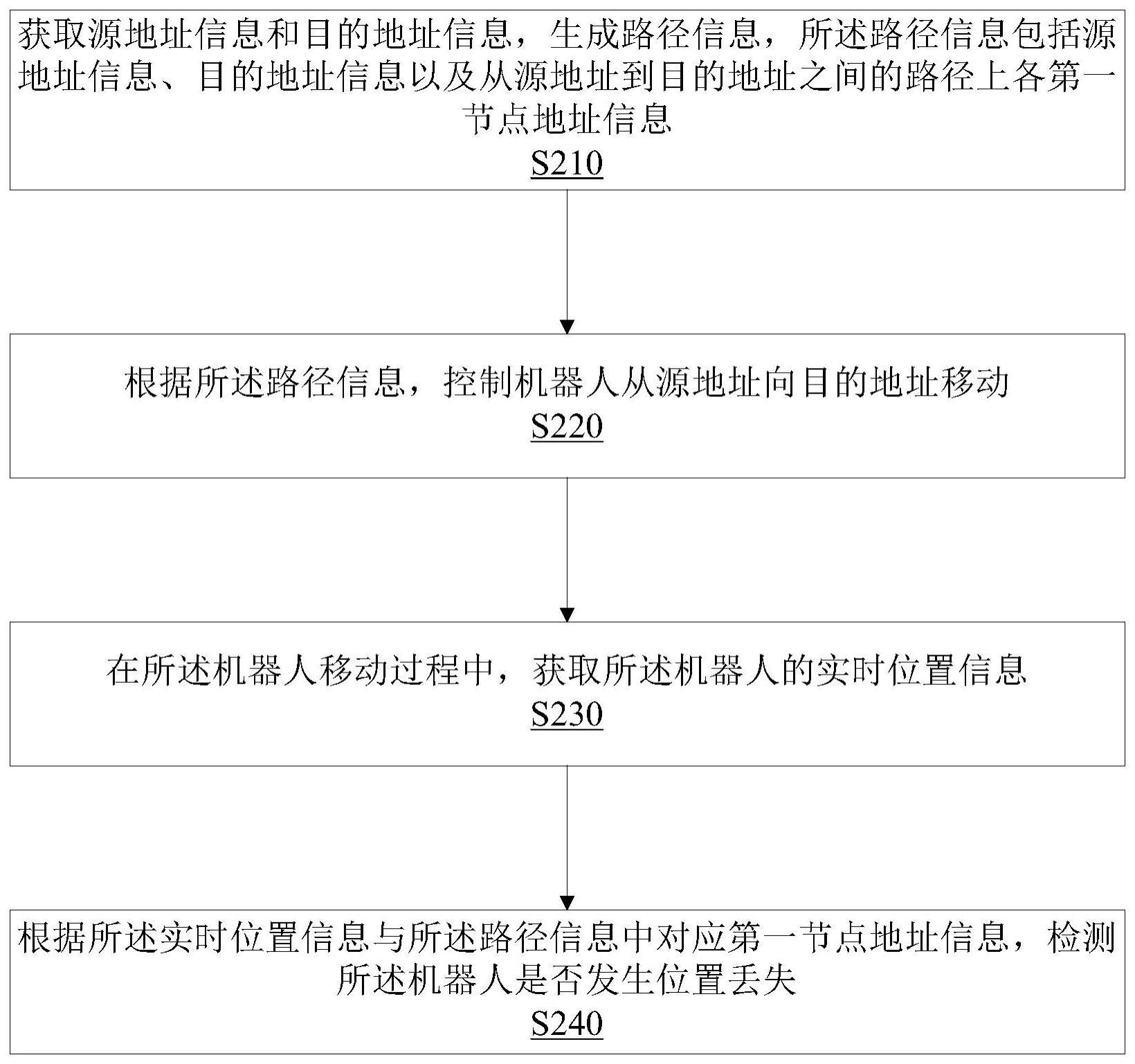
2、本公开实施例的第一方面,提供了一种路径规划方法,包括:获取源地址信息和目的地址信息,生成路径信息,所述路径信息包括源地址信息、目的地址信息以及从源地址到目的地址之间的路径上各第一节点地址信息;根据所述路径信息,控制机器人从源地址向目的地址移动;在所述机器人移动过程中,获取所述机器人的实时位置信息;根据所述实时位置信息与所述路径信息中对应第一节点地址信息,检测所述机器人是否发生位置丢失。
3、本公开实施例的第二方面,提供了一种路径规划的计算设备,包括:存储器,收发机,处理器:存储器,用于存储计算机程序;收发机,用于在所述处理器的控制下收发数据;处理器,用于读取所述存储器中的计算机程序并执行以下操作:获取源地址信息和目的地址信息,生成路径信息,所述路径信息包括源地址信息、目的地址信息以及从源地址到目的地址之间的路径上各第一节点地址信息;根据所述路径信息,控制机器人从源地址向目的地址移动;在所述机器人移动过程中,获取所述机器人的实时位置信息;根据所述实时位置信息与所述路径信息中对应第一节点地址信息,检测所述机器人是否发生位置丢失。
4、本公开实施例的第三方面,提供了一种路径规划装置,包括:信息单元,被配置成获取源地址信息和目的地址信息,生成路径信息,所述路径信息包括源地址信息、目的地址信息以及从源地址到目的地址之间的路径上各第一节点地址信息;控制单元,被配置成根据所述路径信息,控制机器人从源地址向目的地址移动;位置单元,被配置成在所述机器人移动过程中,获取所述机器人的实时位置信息;检测单元,被配置成根据所述实时位置信息与所述路径信息中对应第一节点地址信息,检测所述机器人是否发生位置丢失。
5、本公开实施例的第四方面,提供了一种电子设备,包括储存器、处理器以及储存在储存器中并且可以在处理器上运行的计算机程序,该处理器执行计算机程序时实现上述方法的步骤。
6、本公开实施例的第五方面,提供了一种计算机可读储存介质,该计算机可读储存介质储存有计算机程序,该计算机程序被处理器执行时实现上述方法的步骤。
7、本公开实施例提供了一种路径规划方法、计算设备、装置、设备及介质。该方法包括:获取源地址信息和目的地址信息,生成路径信息,所述路径信息包括源地址信息、目的地址信息以及从源地址到目的地址之间的路径上各第一节点地址信息;根据所述路径信息,控制机器人从源地址向目的地址移动;在所述机器人移动过程中,获取所述机器人的实时位置信息;根据所述实时位置信息与所述路径信息中对应第一节点地址信息,检测所述机器人是否发生位置丢失。采用本发明实施例的方法,利用所述实时位置信息控制机器人规划路线到达目的地址;能够及时调整机器人移动过程中的位置偏移,提高了机器人路径规划的能力,高效的引导机器人移动至目的地址。
技术特征:
1.一种路径规划方法,其特征在于,所述方法包括:
2.根据权利要求1所述的路径规划方法,其特征在于,所述方法还包括:
3.根据权利要求2所述的路径规划方法,其特征在于,所述方法还包括:
4.根据权利要求1所述的路径规划方法,其特征在于,所述方法还包括:
5.根据权利要求1所述的路径规划方法,其特征在于,所述获取所述机器人的实时位置信息,包括:
6.根据权利要求1所述的路径规划方法,其特征在于,所述获取所述机器人的实时位置信息,包括:
7.一种计算设备,其特征在于,所述计算设备包括:
8.一种路径规划装置,其特征在于,包括:
9.一种电子设备,包括储存器、处理器以及储存在所述储存器中并且可以在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至6中任一项所述方法的步骤。
10.一种计算机可读储存介质,所述计算机可读储存介质储存有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6中任一项所述方法的步骤。
技术总结
本公开涉及人工智能领域,提供了路径规划方法、计算设备、装置、设备及介质。该方法包括:获取源地址信息和目的地址信息,生成路径信息,所述路径信息包括源地址信息、目的地址信息以及从源地址到目的地址之间的路径上各第一节点地址信息;根据所述路径信息,控制机器人从源地址向目的地址移动;在所述机器人移动过程中,获取所述机器人的实时位置信息;根据所述实时位置信息与所述路径信息中对应第一节点地址信息,检测所述机器人是否发生位置丢失。采用本发明实施例的方法,利用所述实时位置信息控制机器人规划路线到达目的地址;能够及时调整机器人移动过程中的位置偏移,提高了机器人路径规划的能力,高效的引导机器人移动至目的地址。
技术研发人员:龚汉越,支涛
受保护的技术使用者:河南云迹智能技术有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!