一种电动轮椅恒速控制系统及其方法与流程
本发明属于轮椅控制系统,具体涉及一种电动轮椅恒速控制系统及其方法。
背景技术:
1、目前市场上智能轮椅控制系统的硬件电机部分,大多采用的技术手段有两种:第一种采用无速度传感器的直流有刷电机,此种控制方式由于没有电机转速的反馈,无法对负载变化做出相应的调整,因此在崎岖不平整路面或者上下坡运行时会出现速度不均匀的情况;第二种采用直流无刷电机,且在直流无刷电机中设置有编码器,通过编码器实时反馈电机的转速来调节轮椅的控制速度,但是采用直流无刷电机相对于直流有刷电机使得轮椅整体的成本较高。
2、综上所述,亟需提供一种电动轮椅恒速控制系统及其方法,以解决现有技术中恒速控制缺陷和成本较高的问题。
技术实现思路
1、为解决现有技术中存在的上述问题,本发明提供了一种电动轮椅恒速控制系统及其方法,通过采集的轮椅姿态数据,对轮椅在平整路面、斜坡路面以及崎岖路面运行时进行速度补偿,实现匀速控制;通过采用无编码器的直流有刷电机,成本低且易于实现。
2、本发明的目的可以通过以下技术方案实现:
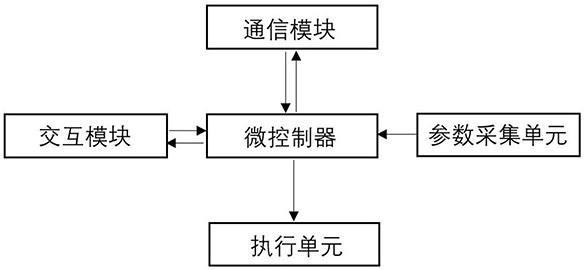
3、本发明提供了一种电动轮椅恒速控制系统,包括交互模块、执行单元、参数采集单元、通信模块和微控制器,所述交互模块、执行单元、参数采集单元和通信模块均与微控制器建立数据通信;
4、所述参数采集单元,包括电机电流传感器、电机温度传感器、电源状态传感器、轮椅姿态监测传感器和轮椅状态监测传感器,用于实时采集轮椅的运行参数;
5、所述微控制器,用于分析和处理来自参数采集单元的轮椅运行参数,从而执行控制策略;同时将轮椅运行参数上传至上位机进行远程监控和控制;
6、所述控制策略,具体为:
7、微控制器根据参数采集单元反馈的角速度进行卡尔曼滤波后计算出的姿态数据判断轮椅的姿态:
8、当轮椅处于坡面行驶时,根据采集的角度数据的不同,通过降低或增加占空比进行相应角度的补偿;同时通过对轮椅前进方向的判断,通过角度数据的变化大小对两个轮毂电机进行差速补偿,以保证轮椅能够保持与坡面垂直的方向行驶;
9、当轮椅处于崎岖不平的路面行驶时,根据采集角度数据的变化大小通过增加占空比进行相应角度的补偿;
10、当接收到上下楼的指令时,微控制器根据参数采集单元反馈的电源参数获取电源的可用电量,通过动力余量决策是否要启用履带;
11、当启用履带上下楼时,如果检测出楼梯角度大于40度,则停止电机输出;如果检测出翻滚角大于10度,说明设备在楼梯上没有直线行驶,降低行驶速度;如果检测出翻滚角大于15度,则停止电机输出,防止倾翻;
12、轮椅在运行的过程中,微控制器通过对比参数采集单元反馈的轮椅运行参数和预设值范围,发出故障预警与驻停命令。
13、作为本发明的一种优选技术方案,所述参数采集单元采集的运行参数包括电机的负载电流、电机的温度、电源参数、姿态数据和振动频率。
14、作为本发明的一种优选技术方案,所述交互模块,包括语音模块和触摸屏模块,用于向微控制器发出指令、请求或查询,同时接收来自微控制器的反馈信息。
15、作为本发明的一种优选技术方案,所述执行单元,包括电机驱动模块和直流有刷电机,所述电机驱动模块通过接收来自微控制器的pwm信号驱动直流有刷电机运行。
16、作为本发明的一种优选技术方案,所述电机电流传感器,用于采集直流无刷电机在运行中的负载电流数据并传输至微控制器中进行分析和处理;
17、所述电机温度传感器,用于采集电机轴承的温度数据并传输至微控制器中进行分析和处理。
18、作为本发明的一种优选技术方案,所述电源状态传感器,用于采集电源的电压、电流和温度参数并传输至微控制器中进行分析和处理。
19、作为本发明的一种优选技术方案,所述轮椅姿态监测传感器,包括陀螺仪,通过将测量的角速度传输至微控制器中获取姿态数据;其中,姿态数据包括俯仰角、翻滚角和偏航角。
20、作为本发明的一种优选技术方案,所述轮椅状态监测传感器,包括加速度传感器,用于采集电机的振动频率并发送至微控制器进行分析和处理。
21、作为本发明的一种优选技术方案,所述通信模块,通过无线或有线的方式建立与其他设备的通信连接并与微控制器进行数据交换。
22、本发明还提供了一种电动轮椅恒速控制方法,包括以下步骤:
23、s1、采集运行参数:通过参数采集单元获取轮椅的运行参数,包括电机的负载电流、电机的温度、电源参数、姿态数据和振动频率;
24、s2、数据处理与识别:根据运行参数的预设范围,通过电机的温度和振动频率判断轮椅的故障状况,通过姿态数据判断轮椅的行驶路况,通过电源参数判断轮椅的动力及行程;
25、s3、发送控制指令:通过识别的轮椅的运行状态和交互模块获取的信息生成相应的控制指令,发送至执行单元;
26、s4、修正控制命令:将参数采集单元反馈的负载电流数据发送至微控制器,根据负载电流与转速的特性曲线,修正占空比使得电机的转速保持恒定;
27、s5、监测运行状态:循环步骤s1~s4,通过不断监测运行参数,实时调整控制命令。
28、本发明的有益效果为:
29、(1)通过采用无编码器的直流有刷电机,根据姿态数据调节pwm信号完成匀速控制和保护控制,成本低且易于实现。
30、(2)通过陀螺仪提供的姿态数据,具有较高的鲁棒性,对于外界的干扰有非常高的稳定性,可以实现快速响应,在不同路面的应用场景下可以充分发挥陀螺仪对速度补偿的效果。
31、(3)通过负载电流的反馈,完成了转速的精细化调控,同时配合姿态数据调控保障了系统的稳定性;通过故障预警及驻停功能进一步提高了轮椅在运行过程中的安全性。
技术特征:
1.一种电动轮椅恒速控制系统,其特征在于:包括交互模块、执行单元、参数采集单元、通信模块和微控制器,所述交互模块、执行单元、参数采集单元和通信模块均与微控制器建立数据通信;
2.根据权利要求1所述的一种电动轮椅恒速控制系统,其特征在于:所述参数采集单元采集的运行参数包括电机的负载电流、电机的温度、电源参数、姿态数据和振动频率。
3.根据权利要求1所述的一种电动轮椅恒速控制系统,其特征在于:所述交互模块,包括语音模块和触摸屏模块,用于向微控制器发出指令、请求或查询,同时接收来自微控制器的反馈信息。
4.根据权利要求1所述的一种电动轮椅恒速控制系统,其特征在于:所述执行单元,包括电机驱动模块和直流有刷电机,所述电机驱动模块通过接收来自微控制器的pwm信号驱动直流有刷电机运行。
5.根据权利要求1所述的一种电动轮椅恒速控制系统,其特征在于:所述电机电流传感器,用于采集直流无刷电机在运行中的负载电流数据并传输至微控制器中进行分析和处理;
6.根据权利要求1所述的一种电动轮椅恒速控制系统,其特征在于:所述电源状态传感器,用于采集电源的电压、电流和温度参数并传输至微控制器中进行分析和处理。
7.根据权利要求1所述的一种电动轮椅恒速控制系统,其特征在于:所述轮椅姿态监测传感器,包括陀螺仪,通过将测量的角速度传输至微控制器中获取姿态数据;其中,姿态数据包括俯仰角、翻滚角和偏航角。
8.根据权利要求1所述的一种电动轮椅恒速控制系统,其特征在于:所述轮椅状态监测传感器,包括加速度传感器,用于采集电机的振动频率并发送至微控制器进行分析和处理。
9.根据权利要求1所述的一种电动轮椅恒速控制系统,其特征在于:所述通信模块,通过无线或有线的方式建立与其他设备的通信连接并与微控制器进行数据交换。
10.一种电动轮椅恒速控制方法,应用于如权利要求1至9任一项所述的一种电动轮椅恒速控制系统,其特征在于:包括以下步骤:
技术总结
本发明涉及一种电动轮椅恒速控制系统及其方法,属于轮椅控制系统技术领域。包括交互模块、执行单元、参数采集单元、通信模块和微控制器,其中交互模块、执行单元、参数采集单元和通信模块均与微控制器建立数据通信;参数采集单元包括电机电流传感器、电机温度传感器、电源状态传感器、轮椅姿态监测传感器、轮椅状态监测传感器,用于实时采集轮椅的运行参数;微控制器用于分析和处理来自参数采集单元的轮椅运行参数执行控制策略;同时将运行参数上传至上位机进行远程监控和控制。本发明通过采集的姿态数据,对轮椅在平整路面、斜坡路面以及崎岖路面运行时进行速度补偿,实现匀速控制;通过采用无编码器的直流有刷电机,成本低且易于实现。
技术研发人员:赵勇,任海军,梁国寿,梁灶基,徐明宇,包士维,于富强
受保护的技术使用者:小神童创新科技(广州)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!