一种飞机智能飞行安全保护方法与流程
本申请属于飞机智能飞行控制领域,特别涉及一种飞机智能飞行安全保护方法。
背景技术:
1、飞机智能飞行态势瞬息万变,要求飞机具有较强的机动能力,以适应飞行的需求。飞行员在没有多余的精力关注飞机飞行的状态时,需要飞行安全保护方法,其在关键时刻不但能挽救耗费大量人力物力培养的飞行员的生命,也能保护作为国家重要财产的飞机的安全。
技术实现思路
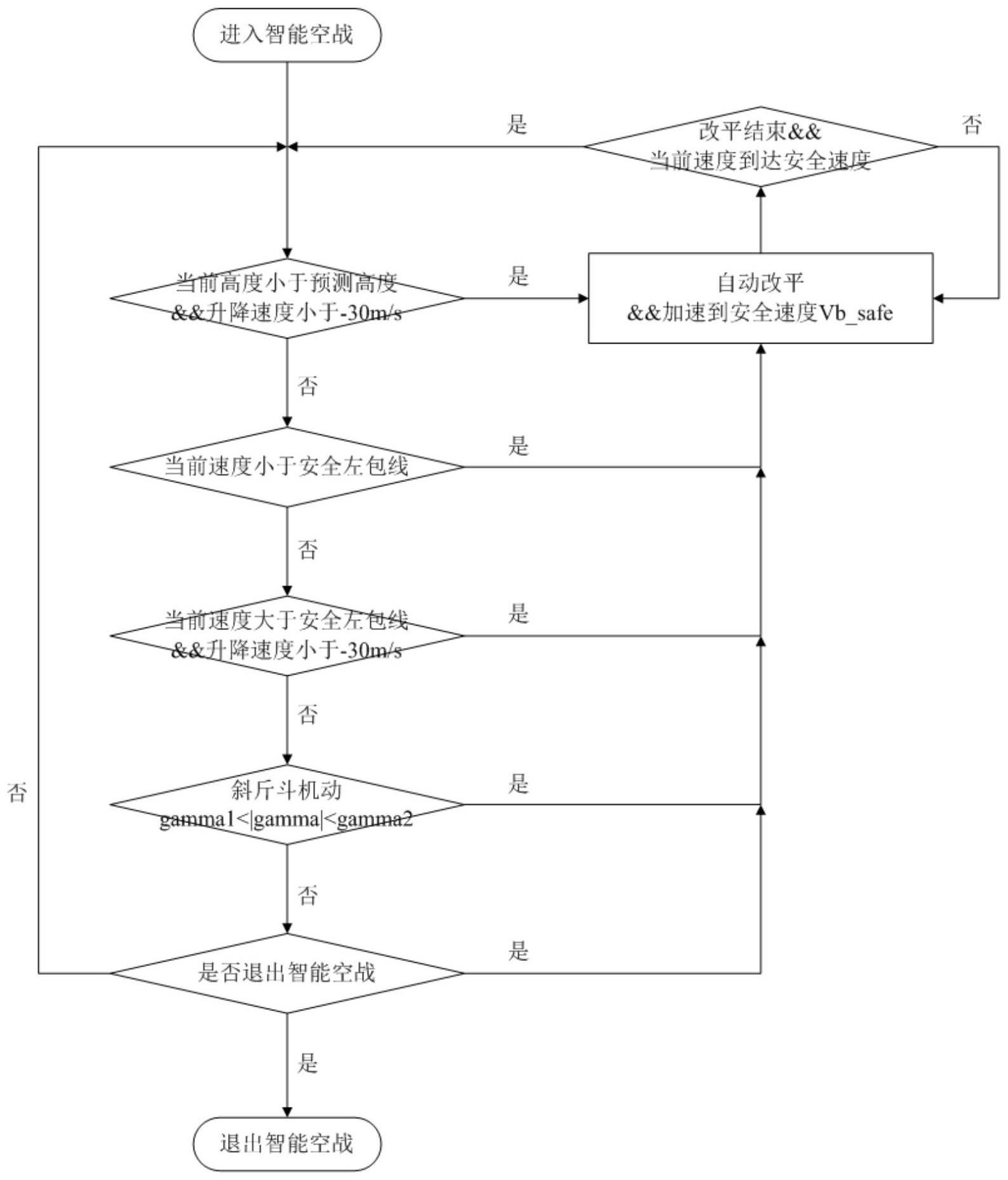
1、为了解决上述问题,本申请提供了一种飞机智能飞行安全保护方法,包括:
2、当飞机的当前高度小于预测高度,并且飞机有向下运动趋势时,启动飞机自动改平模式,改平飞机;
3、飞机表速小于安全左包线vb_low,启动飞机自动改平模式,改平飞机;飞机表速大于安全右包线vb_high,并且飞机有向下运动趋势时,启动飞机自动改平模式,改平飞机;
4、当飞机作斜斤斗机动,滚转角超出滚转角安全边界时,启动飞机自动改平模式,改平飞机。
5、优选的是,所述预测高度h_predict为基础高度h_base、拉起高度损失deltah以及安全余量的和。
6、优选的是,拉起高度损失deltah计算方法为:
7、deltah=max(r1×(1-cos(theta))-(2+t1)×vy,0)
8、r1=vtrue2/4/9.8
9、
10、其中,vtrue为真空速度,vy为升降速度,theta为航迹倾角,ma为马赫数,gamma为滚转角,r1为拉起的半径,t1为飞机滚转至机翼水平需要的时间,max为取大函数。
11、优选的是,安全余量取值50。
12、优选的是,安全左包线vb_low与安全右包线vb_high的获取方法包括:
13、获取飞机典型飞行包线,将飞机典型飞行包线向内偏移安全余量,获取飞机典型飞行包线左包线偏移后的安全左包线vb_low,获取飞机典型飞行包线右包线偏移后的安全右包线vb_high。
14、优选的是,所述滚转角gamma满足安全边界时与安全边界的关系式为:
15、gamma1<|gamma|<gamma2;
16、其中,gamma1为安全边界的下边界,gamma2为安全边界的上边界。优选的是,所述滚转角安全边界计算公式为:
17、gamma1=acos(cos(zeta)/ny_cmd)-zeta-20
18、gamma2=acos(cos(zeta)/ny_cmd)+zeta+30
19、其中,zeta为斜斤斗轨迹倾斜面与水平面的夹角,ny_cmd为斜斤斗机动所用的法向过载指令。
20、优选的是,飞机自动改平模式通过将控制飞机速度至安全速度vb_safe使飞机改平。
21、本申请的优点包括:本发明主要应用于飞机智能空中飞行,具有应用性强、鲁棒性强、使用方便等特点,该方法可以实现机动过程中自动安全保护,对于挽救飞行员和飞机安全具有重要的工程意义,为我国智能智能空中飞行提供一定的安全保护策略。
22、本申请适用性强,不仅适用于后续新研型号,同样适用于现有部分使用数字电传的三代机,只需要根据不同飞机更改相应的使用包线和滚转角控制范围即可实现,本发明涉及的控制算法鲁棒性强,信号故障瞬态极小,使用安全风险极低。本项目可通用性强,可在多种型号飞机移植使用。
技术特征:
1.一种飞机智能飞行安全保护方法,其特征在于,包括:
2.如权利要求1所述的飞机智能飞行安全保护方法,其特征在于,所述预测高度h_predict为基础高度h_base、拉起高度损失deltah以及安全余量的和。
3.如权利要求2所述的飞机智能飞行安全保护方法,其特征在于,其中,拉起高度损失deltah计算方法为:
4.如权利要求3所述的飞机智能飞行安全保护方法,其特征在于,安全余量取值50。
5.如权利要求1所述的飞机智能飞行安全保护方法,其特征在于,安全左包线vb_low与安全右包线vb_high的获取方法包括:
6.如权利要求1所述的飞机智能飞行安全保护方法,其特征在于
7.如权利要求1所述的飞机智能飞行安全保护方法,其特征在于,所述滚转角安全边界计算公式为:
8.如权利要求1所述的飞机智能飞行安全保护方法,其特征在于,飞机自动改平模式通过将控制飞机速度至安全速度vb_safe使飞机改平。
技术总结
本申请属于飞机智能飞行控制领域,特别涉及一种飞机智能飞行安全保护方法,当飞机的当前高度小于预测高度,并且飞机有向下运动趋势时,启动飞机自动改平模式,改平飞机;飞机表速小于安全左包线Vb_low,启动飞机自动改平模式,改平飞机;飞机表速大于安全右包线Vb_high,并且飞机有向下运动趋势时,启动飞机自动改平模式,改平飞机;当飞机作斜斤斗机动,滚转角超出滚转角安全边界时,启动飞机自动改平模式,改平飞机,本申请主要应用于飞机智能空中飞行,应用性强、鲁棒性强、使用方便。
技术研发人员:王志刚,丁岩,朱家兴,王业光,王家兴
受保护的技术使用者:中国航空工业集团公司沈阳飞机设计研究所
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!