一种基于行为克隆和协同性系数的三体协同搬运方法及系统与流程
本发明属于人机协作,具体涉及一种基于行为克隆和协同性系数的三体协同搬运方法及系统。
背景技术:
1、如今,随着元宇宙兴起,人工智能、大数据、移动互联网等新一代信息技术快速发展和普及应用,融合虚拟现实、增强现实、深度学习、语义理解、语音识别等多种 ai 技术的数字虚拟人正成为人工智能应用最广泛、最有发展潜力的领域之一。
2、在搬运、避障等人机协作(hrc)领域,当任务较为复杂,机器人和人类感知信息的差异性可能会导致人类在完成某一具体任务时出现和机器人决策的相悖行为。以搬运过程为例,人会不可避免地对搬运任务额外地克服机器人决策差异而做功。
3、因此,本发明在整个协同系统中加入虚拟人角色,构成人-虚拟人-机器人协同(hvrc)系统,因其感知信息的全面性,结合数字孪生技术,用以平衡人机认知差异,作出智能决策,实时调整机器人行为以提高协同效率。
技术实现思路
1、发明目的:本发明在传统的人机协作系统上加入虚拟人,旨在弥补人机协作在应对复杂情形时的低效性,这种低效性主要来自于人和机器人由于对环境感知的差异导致的决策差异,主要体现在人机在参与搬运过程中的不协调性,从而导致协同过程中人的舒适度降低。
2、技术方案:为实现上述目的,本发明提供一种基于行为克隆和协同性系数的三体协同搬运方法,包括以下步骤:
3、为了研究整个协同搬运过程,首先将整个搬运过程分为几个特定阶段,如抬升、放下、加速、减速、匀速、转弯等,对每个阶段单独研究。
4、针对不同的搬运阶段,虚拟人虚拟人通过感知设备学习人类搬运习惯,并反馈到行为克隆鼓励策略算法更新机器人搬运策略,同时通过平滑函数调整机器人行为,使得人机协作进入稳定状态;
5、所述行为克隆鼓励策略算法的目标函数定义为:
6、 ;
7、其中表示搬运阶段,表示人类搬运行为,是机器人搬运策略,为损失函数,通过最小化目标函数更新机器人搬运策略。
8、进一步地,所述搬运阶段的判断通过以下任意一种或多种方式结合实现:
9、①虚拟人对人类行为意图的识别(如语音交互、手势识别等);
10、②虚拟人对环境感知参数的分析。
11、进一步地,所述机器人搬运策略定义为:,其中表示机器人控制参数,包括以下任意一种或多种参数:抬升高度(针对抬升或放下阶段)、加速度(针对加速或减速阶段)、平均速度(针对匀速阶段)、路径曲率、拐弯速度(针对转弯阶段)。
12、进一步地,在机器人搬运策略的执行过程中,进一步通过平滑函数调整机器人控制参数的偏差值,实现控制参数的平滑调整,使得协同性系数,所述平滑函数定义为:
13、 ;
14、其中为控制参数的初始偏差值,令得出预计调整时间:
15、 ;
16、其中为阈值。
17、进一步地,所述协同性系数定义为:
18、;
19、其中根据机器人控制参数和实际感知参数确定,实际感知参数包括以下任意一种或多种参数:抬升高度、力传感器数据、平均速度、路径曲率、拐弯速度。
20、进一步地,在搬运过程中,虚拟人根据环境感知模块得到的点云地图,构建二维平面栅格地图,由此进行路径规划。
21、进一步地,所述路径规划方法具体包括:
22、1)已知搬运起始点和终点,使用a*算法计算出初始路径;
23、2)在初始路径的基础上,应用三角形顶点筛查法进行路径优化。
24、进一步地,所述三角形顶点筛查法具体包括:
25、假设初始路径上的三个连续节点,即:起始节点、中间节点、以及末端节点构成三角形,且障碍物坐标为,则作如下限定:
26、 ;
27、其中,s是最小安全距离,若(表示、之间的路径可避开障碍物),则去除节点,直接连接节点和作为新的路径(两点之间直线最短),否则从节点沿着节点方向逐单位栅格距离进行试探(沿-方向找最短路径),即:将更新为,,,其中为单位栅格距离,更新后重新计算并进行下一轮判断,重复以上过程,最终得到最少节点数和最短路径。
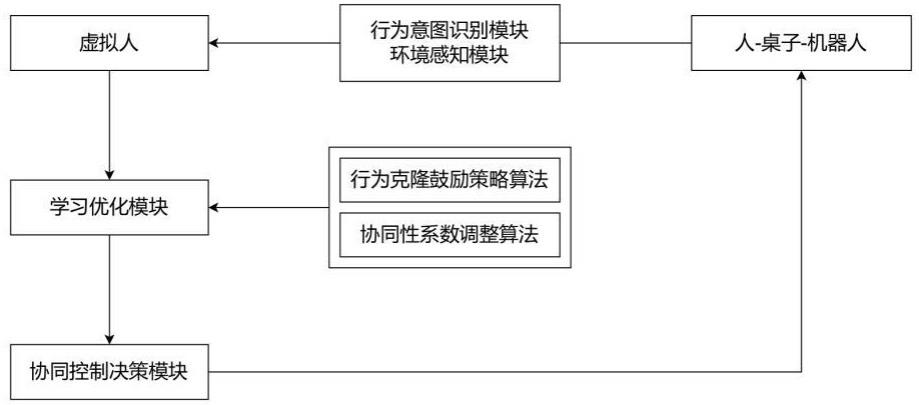
28、此外,本发明还提供了一种基于行为克隆和协同性系数的三体协同搬运系统,包括虚拟人、机器人、真人三个参与主体和多源感知模块,该系统利用上述三体协同搬运方法执行人机协作搬运任务,其中虚拟人为分布式云端智能体。
29、进一步的,所述多源感知模块包括:
30、环境感知模块,用于采集地图信息;
31、行为意图识别模块,用于获取真人行为和意图。
32、有益效果:本发明在传统的人机协作任务中加入可交互、多途径感知信息、智能平衡人机行为差异、智能决策的虚拟人,运用行为克隆网络使机器人在不同阶段做出与人相近的行为动作,通过协同性系数调整算法(即平滑函数)使人机行为达成一致,使得系统进入稳态,有效提高了任务协作效率。
技术特征:
1.一种基于行为克隆和协同性系数的三体协同搬运方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的三体协同搬运方法,其特征在于,所述搬运阶段的判断通过以下任意一种或多种方式结合实现:
3.根据权利要求1所述的三体协同搬运方法,其特征在于,所述机器人搬运策略定义为:,其中表示机器人控制参数,包括以下任意一种或多种参数:抬升高度、加速度、平均速度、路径曲率、拐弯速度。
4.根据权利要求3所述的三体协同搬运方法,其特征在于,在机器人搬运策略的执行过程中,进一步通过平滑函数调整机器人控制参数的偏差值,使得协同性系数,所述平滑函数定义为:
5.根据权利要求4所述的三体协同搬运方法,其特征在于,所述协同性系数定义为:
6.根据权利要求1所述的三体协同搬运方法,其特征在于,在搬运过程中,虚拟人根据环境感知模块得到的点云地图,构建二维平面栅格地图,由此进行路径规划。
7.根据权利要求6所述的三体协同搬运方法,其特征在于,所述路径规划方法具体包括:
8.根据权利要求7所述的三体协同搬运方法,其特征在于,所述三角形顶点筛查法具体包括:
9.一种基于行为克隆和协同性系数的三体协同搬运系统,其特征在于,包括虚拟人、机器人、真人三个参与主体和多源感知模块,该系统利用权利要求1-8中任一所述三体协同搬运方法执行人机协作搬运任务,其中虚拟人为分布式云端智能体。
10.根据权利要求9所述的三体协同搬运系统,其特征在于,所述多源感知模块包括:
技术总结
本发明公开了一种基于行为克隆和协同性系数的三体协同搬运方法及系统,该方法包括:根据搬运状态,将搬运任务划分为各个搬运阶段,包括抬升阶段、放下阶段、加速阶段、匀速阶段、减速阶段、转弯阶段;针对不同的搬运阶段,虚拟人通过感知设备学习人类搬运习惯,并反馈到行为克隆鼓励策略算法更新机器人搬运策略,同时通过平滑函数调整机器人行为,使得人机协作进入稳定状态。本发明在传统的人机协作任务中加入可交互、多途径感知信息、智能平衡人机行为差异、智能决策的虚拟人,运用行为克隆网络使机器人在不同阶段做出与人相近的行为动作,通过协同性系数调整算法使人机行为达成一致,使得系统进入稳态,有效提高了任务协作效率。
技术研发人员:李新德,钱玉航,吕志伟
受保护的技术使用者:南京泛美利机器人科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!