本发明涉及无人集群协同搜索,尤其涉及一种能量约束下uav-usv协同探索海域目标的路径优化方法。
背景技术:
1、近几十年来,对海洋勘探的投资不断增加,导致对海洋技术的关注也越来越高。各种海洋勘探活动涉及许多危险和复杂的任务,如果没有专门工具的协助,往往是不可能完成的。海洋机器人如无人船(usv)、无人机(uav)和自主水下航行器(auv)提供了不同的适合于广泛任务的探测方法,因此被广泛应用于许多领域。然而,单一无人系统的载荷和视觉能力有限,往往难以完成具有大量探测目标的复杂任务,多无人系统的协同可以有效地解决这一问题。目前尚未有关于usv-uav协同系统用于海域目标探索及海域事故监控的研究。
技术实现思路
1、根据现有技术存在的问题,本发明公开了一种能量约束下uav-usv协同探索海域目标的路径优化方法,具体包括如下步骤:
2、基于维诺图规划充电站的位置,使充电站集合覆盖所有的事故高发点;
3、采用贪婪算法减少充电站的基数,从初始充电站集中选择覆盖最多事故高发点的集合,直至覆盖所有的事故高发点;
4、对充电站点的位置做集中处理使其向指挥部靠拢;
5、采用改进的蚁群算法对usv进行航迹规划,其中usv携带uav遍历所有充电站点;
6、基于改进的lazy theta*算法对uav进行航迹规划,确保获得的路径平缓。
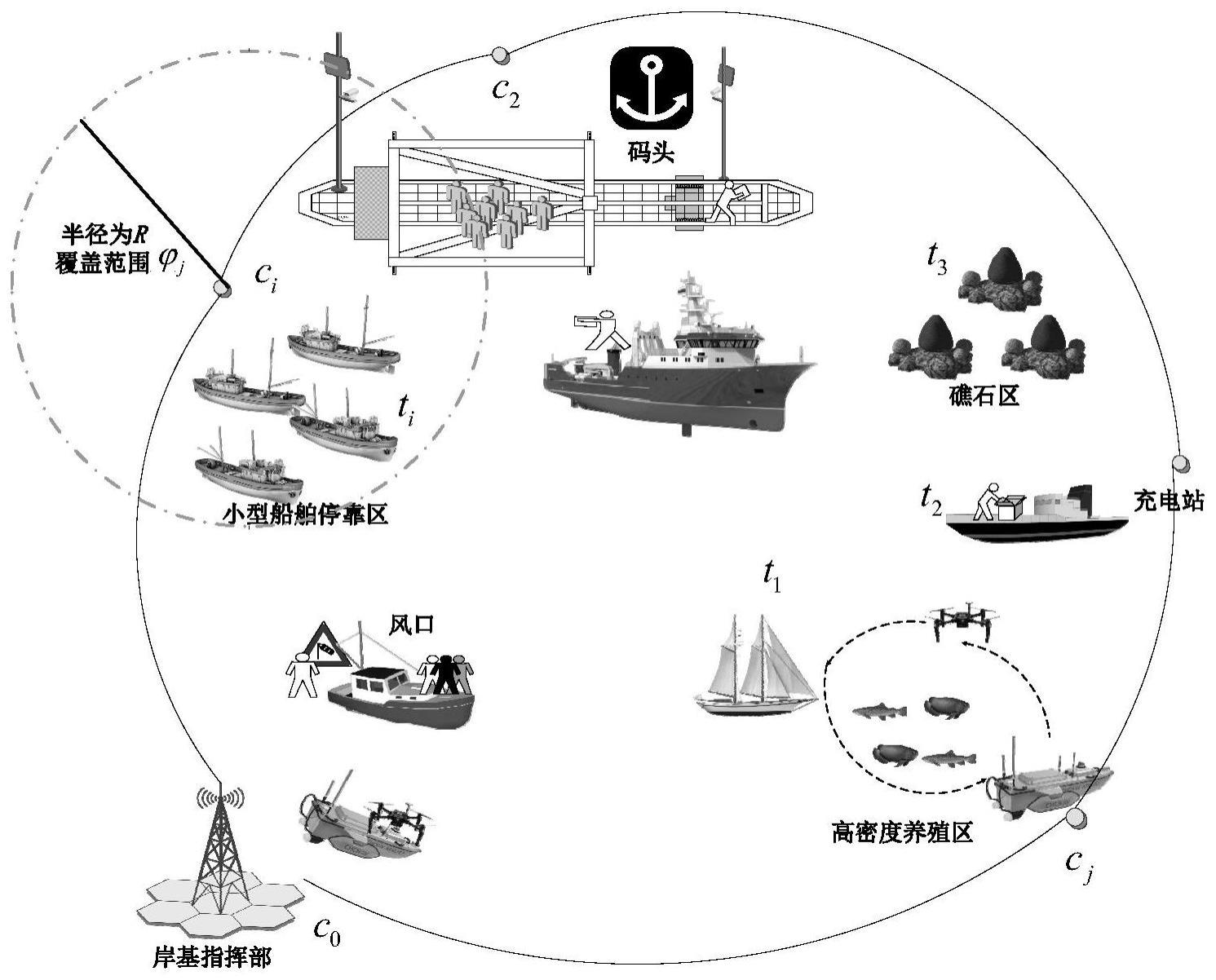
7、进一步的,将usv作为能量受限的uav的移动充电站,对任务海域进行监控搜索,设t为任务海域的事故高发点集合{t1,...,tn},且ti∈t(i=1,...,n),根据事故高发点的位置规划usv充电站位置,设ω为充电站位置集合{c0,...,cm},且cj∈ω(j=0,1,...,m),由于uav能量受限,设最远飞行距离为2r,保证全部事故高发点都被半径为r的圆覆盖,因此设φ为被ω覆盖的事故高发点的集合其中且的半径等于r,基于维诺图规划充电站cj的位置,将事故高发点集视为维诺点集,通过delaunay三角网得到维诺图,从而计算维诺图并规划充电站位置、保证每一个事故高发点都被充电站覆盖。
8、进一步的,对规划的充电站cj的数量进行优化从而减少ω的基数,选取能覆盖所有事故高发点的最小充电站集合,采用贪婪算法减少ω基数,从初始充电站集ω中选择覆盖最多事故高发点的集合,直至覆盖所有的事故高发点。
9、进一步的,usv搭载uav从指挥部c0出发,到达充电站后,uav从usv上启航探索任务海域的事故高发地,usv继续作为充电站原地等待返航uav,根据uav的速度大于usv的速度,在匀速的前提下使uav承担更多探索任务,以指挥部为中心,对经过数量优化过后的充电站的位置做集中处理,使其向指挥部靠拢,从而更新充电站cj的位置,达到缩短usv的航行路线、uav承担更多探索任务的目的。
10、进一步的,usv从c0出发沿优化过后的充电站航行,直至ω中的充电站cj全部遍历结束返回c0,采用改进的蚁群算法对usv进行航迹规划,提出如下信息素更新策略:
11、τij(t+n)=ρ1·τij(t)+ρ2·τij(t+1)+ρn·τij(t+n-1)+δτij(t)
12、由于ρ∈[0,1),因此当(n+t)→∞时,
13、
14、其中ρ表示信息素蒸发系数,取值为[0,1);δτij(t)表示本次循环中路径[i,j)上的信息素增量;δτijk(t)表示第k只蚂蚁在本次循环中留在路径(i,j)上的信息量。
15、进一步的,usv按照设计航行到达每一个充电站cj时,uav从移动充电站usv上启航探索事故高发点,设s为uav子路径集,s={s1,...,sk},若探索中uav电量充足,则子路径si∈s表示为{cj,ti,ti+1,...,tq,cj};若探索中uav电量不足,则中途返回usv上进行充电后重新启航探索,则子路径si∈s表示为{cj,ti,cj,ti+1,...,tq,cj},基于改进的lazy theta*算法对uav探索事故高发点进行航迹规划,使得到的路径会更加平缓,对lazy theta*算法成本函数进行如下改进加权,即获取比起从出发点到当前点的距离,当前点到终点的距离的估值影响更大,即“更想接近终点”:
16、f(m)=g(m)+ε×h(m)
17、其中,g(m)为从初始节点到当前节点m的实际成本;h(m)为从当前节点m到目标节点的估计成本;ε为启发式加权因子(ε≥1)。
18、本发明uav-usv协同系统的效能函数如下:
19、usv的效能函数fusv、tusv分别为:
20、
21、
22、其中为usv从ci到cj行驶的距离,为usv从最后一个充电站cm返回指挥部c0行驶的距离,vusv为usv航行速度;
23、uav的效能函数fuav、tuav为:
24、
25、
26、
27、其中为uav从cj到ti航行距离;为uav探索途中电量不足,需要从ti返回到cj充电航行的距离,表示uav充电后从cj到下一个事故高发点ti+1航行的距离,为uav电量充足,不经过充电站,直接从ti航行到ti+1的距离;为uav探索完最后一个事故高发点tp返回到充电站cj航行的距离;vuav为uav航行速度。
28、综上,总效能函数ftotal,ttotal为:
29、ftotal=fusv+fuav
30、ttotal=tuav+tusv
31、通过优化ftotal和ttotal从而提高uav-usv协同探索任务海域事故高发点的效率。
32、由于采用了上述技术方案,本发明提供的一种能量约束下uav-usv协同探索海域目标的路径优化方法,离线优化部分充分考虑了海域内事故高发点分布状况以及减少资源浪费的目的,使用最少的充电站覆盖全部事故高发点;在线部分对lazy theta*算法和蚁群算法进行改进,结合二者的优点,对usv-uav协同系统的路径进行优化,使得规划路径的速度更快,路径更平滑;此优化策略可以同时解决无人船灵活性差和无人机能量有限的问题,充分发挥各自的优势对海域内事故高发点进行有效搜索,达成持续监控。
技术特征:1.一种能量约束下uav-usv协同探索海域目标的路径优化方法,其特征在于,包括以下步骤:
2.根据权利要求1所示的一种能量约束下uav-usv协同探索海域目标的路径优化方法,其特征在于:将usv作为能量受限的uav的移动充电站,对任务海域进行监控搜索,设t为任务海域的事故高发点集合{t1,...,tn},且ti∈t(i=1,...,n),根据事故高发点的位置规划usv充电站位置,设ω为充电站位置集合{c0,...,cm},且cj∈ω(j=0,1,...,m),由于uav能量受限,设最远飞行距离为2r,保证全部事故高发点都被半径为r的圆覆盖,因此设φ为被ω覆盖的事故高发点的集合其中且的半径等于r,基于维诺图规划充电站cj的位置,将事故高发点集视为维诺点集,通过delaunay三角网得到维诺图,从而计算维诺图并规划充电站位置、保证每一个事故高发点都被充电站覆盖。
3.根据权利要求2所示的一种能量约束下uav-usv协同探索海域目标的路径优化方法,其特征在于:对规划的充电站cj的数量进行优化从而减少ω的基数,选取能覆盖所有事故高发点的最小充电站集合,采用贪婪算法减少ω基数,从初始充电站集ω中选择覆盖最多事故高发点的集合,直至覆盖所有的事故高发点。
4.根据权利要求3所示的一种能量约束下uav-usv协同探索海域目标的路径优化方法,其特征在于:usv搭载uav从指挥部c0出发,到达充电站后,uav从usv上启航探索任务海域的事故高发地,usv继续作为充电站原地等待返航uav,根据uav的速度大于usv的速度,在匀速的前提下使uav承担更多探索任务,以指挥部为中心,对经过数量优化过后的充电站的位置做集中处理,使其向指挥部靠拢,从而更新充电站cj的位置,达到缩短usv的航行路线、uav承担更多探索任务的目的。
5.根据权利要求4所示的一种能量约束下uav-usv协同探索海域目标的路径优化方法,其特征在于:usv从c0出发沿优化过后的充电站航行,直至ω中的充电站cj全部遍历结束返回c0,采用改进的蚁群算法对usv进行航迹规划,提出如下信息素更新策略:
6.根据权利要求1所示的一种能量约束下uav-usv协同探索海域目标的路径优化方法,其特征在于:usv按照设计航行到达每一个充电站cj时,uav从移动充电站usv上启航探索事故高发点,设s为uav子路径集,s={s1,...,sk},若探索中uav电量充足,则子路径si∈s表示为{cj,ti,ti+1,...,tq,cj};若探索中uav电量不足,则中途返回usv上进行充电后重新启航探索,则子路径si∈s表示为{cj,ti,cj,ti+1,...,tq,cj},基于改进的lazy theta*算法对uav探索事故高发点进行航迹规划,使得到的路径会更加平缓,对lazy theta*算法成本函数进行如下改进加权:
技术总结本发明公开了一种能量约束下UAV‑USV协同探索海域目标的路径优化方法,包括以下步骤:基于维诺图规划充电站的位置,使充电站集合覆盖所有的事故高发点;采用贪婪算法减少充电站的基数,从初始充电站集中选择覆盖最多事故高发点的集合,直至覆盖所有的事故高发点;对充电站点的位置做集中处理使其向指挥部靠拢;采用改进的蚁群算法对USV进行航迹规划,其中USV携带UAV遍历所有充电站点;基于改进的Lazy Theta*算法对UAV进行航迹规划,确保获得的路径平缓。该方法采用优化策略可以同时解决无人船灵活性差和无人机能量有限的问题,充分发挥各自的优势对海域内事故高发点进行有效搜索,达成持续监控。
技术研发人员:岳伟,韩悦,李莉莉,刘中常,邹存名,王丽媛
受保护的技术使用者:大连海事大学
技术研发日:技术公布日:2024/1/15