一种矿山无人运输的协同装载运输系统及方法
本技术属于智慧矿山开采,具体涉及一种矿山无人运输的协同装载运输系统及方法。
背景技术:
1、智慧矿山应用了人工智能、物联网、大数据等新型技术,通过多模态传感器、人工智能算法、卫星定位、实时通信及相关硬件实现无人驾驶与设备协同,有望解决矿山行业人力成本提升、事故多发、司机短缺等诸多痛点。
2、尽管无人驾驶技术在城市道路的应用已得到长足发展,但矿山道路地形不平整、道路标识缺失、作业内容多样,无人驾驶技术难以直接应用至矿山环境;
3、针对这一现状,已有一些无人驾驶方案被提出。例如,专利《一种露天矿山无人化运输的绕障规划系统及方法》提出无人化运输的绕障规划系统及方法,以解决露天矿山无人化运输受到突发障碍物的影响;专利《一种露天矿山无人化运输系统的矿用卡车卸载方法及系统》通过机群调度中心引导矿卡自动化卸载;专利《基于5g的矿区无人运输系统及其矿铲车的协同控制方法》基于5g通信实现矿车与铲车的协同自动化控制。
4、矿山道路环境复杂,多挡墙、斜坡、石堆等障碍物,与传统有人驾驶方式相比,远程操控系统缺失震动反馈与车内驾驶位视角,不利于驾驶员估计路况信息与车身尺寸,不利于精确控制车辆速度与位姿。
5、为此,本技术提供一种矿山无人运输的协同装载运输系统及方法以解决上述问题。
技术实现思路
1、本技术实施例的目的是提供一种矿山无人运输的协同装载运输系统及方法,其引入局部路径规划、增强现实、全景影像等功能,引导操作者安全快速抵达装载位置并精确调整位姿,提高作业安全性与效率,从而可以解决背景技术中涉及的至少一个技术问题。
2、为了解决上述技术问题,本技术是这样实现的:
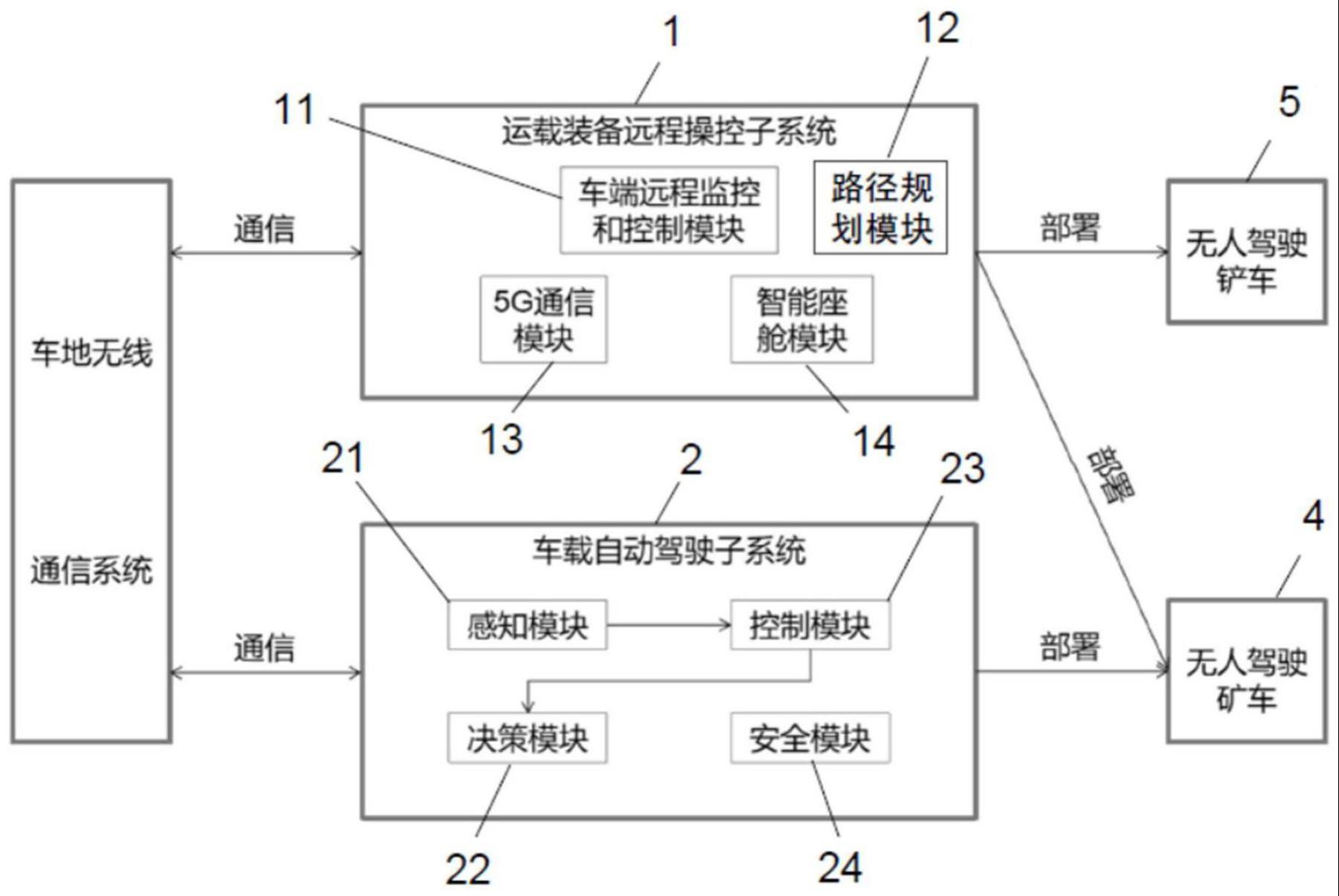
3、本技术实施例提供了一种矿山无人运输的协同装载运输系统,包括运载装备远程操控子系统、车载自动驾驶子系统、车地无线通信系统和无人驾驶矿车,其中,
4、所述运载装备远程操控子系统包括:
5、车端远程监控和控制模块,设置于无人驾驶矿车上,用于监测矿车状态与环境信息,响应远程接管请求并执行远程驾驶命令;
6、路径规划模块,用于接受地图、起始终止点以及位姿信息,并基于混合a*算法规划最优可行路径;
7、5g通信模块,用于实现远程驾驶座舱与矿车之间的实时通信,高效传输数据与命令;以及
8、智能座舱模块,由驾驶员操作,为驾驶员提供矿车周边环境信息,接收驾驶员操控命令,并将操控命令通过所述5g通信模块传输给矿车;
9、所述车载自动驾驶子系统包括:
10、感知模块,用于通过多模态传感器获取矿车周围环境信息,通过导航模块进行自身定位与导航;
11、决策模块,用于根据人工智能算法对感知模块获取到的矿车周围环境信息进行分析,并结合矿车自身动力学特性、行驶任务与通行规则,确定矿车行驶的方向、距离与速度,并下达决策命令;
12、控制模块,用于接收决策命令,将决策命令落实到矿车的命令执行硬件设备上,实现对矿车状态的精准操控,使矿车完成自动驾驶任务;以及
13、安全模块,用于识别与应对紧急状况,根据紧急情况实现急停、动力中断或远程接管;
14、所述车地无线通信系统,用于控制台与矿车通信,监测矿车状态并反馈给管理者,实现控制台与矿车之间命令和数据的实时传输;
15、所述无人驾驶矿车,用于搭载所述运载装备远程操控子系统、所述车载自动驾驶子系统和所述车地无线通信系统,可根据不同任务实现矿车远程驾驶与自动驾驶模式切换,提高作业效率。
16、可选的,所述矿车周边环境信息包括矿车前方相机画面、基于增强现实的最优可行路径可视化信息以及车身周边全景影像信息。
17、可选的,所述无人驾驶矿车的车身四周搭载至少四个激光雷达,通过激光束扫描周围环境获取点云信息;车身四周还搭载至少八个可见光摄像头,采集环境图像;车头车尾搭载至少两个毫米波雷达,通过发射毫米波并分析回波来感知环境信息;车头上方搭载通信天线和卫星天线,通信天线可实现于控制台的信息通信,卫星天线用于接受定位卫星载波从而实现矿车的卫星定位。
18、可选的,所述摄像头通过gmsl接口与车载嵌入式工控机连接,所述激光雷达通过网口与车载嵌入式工控机连接,所述毫米波雷达通过can总线与车载嵌入式工控机连接。
19、可选的,所述无人驾驶矿车的底部设有用于在装载过程中获取矿料重量信息的载重压力传感器。
20、可选的,还包括无人驾驶铲车,所述无人驾驶铲车搭载所述远程操控子系统和所述车地无线通信系统,由位于智能座舱模块的驾驶员进行远程操控,实现按既定路线行进,调整铲车姿态以及协同矿车进行装载作业功能;所述车地无线通信系统将铲车状态及位置信息反馈给控制台,并接受控制台指令。
21、可选的,所述无人驾驶铲车加装有高精度卫星定位天线,分别布置在铲臂底座旋转盘中心以及铲臂与铲斗铰接处。
22、本技术实施例还提供了一种基于所述的系统的矿山无人运输的协同装载运输方法,该方法包括:
23、步骤s1:无人驾驶铲车激活远程驾驶模式,驾驶员通过智能座舱控制铲车进入装载位置;
24、步骤s2:驾驶员调整铲车姿态及铲臂方位;
25、步骤s3:空载的无人驾驶矿车收到控制台发送的装载指令,启用自动驾驶模式,根据目的地规划路线,遵守既定的交通规则,到达并进入装载前等待区停止,发送信号至控制台,表示已就位,等待下一步指令;
26、步骤s4:控制台收到矿车已就位信号,获取矿车的就位先后信息,按照既定调度规则,向矿车发送装载作业指令;
27、步骤s5:矿车收到装载作业指令,切换至远程驾驶模式,路径规划模块接受装载作业区高精地图、起点、终点位置信息,明确起点位姿与终点位姿要求,使用混合a*算法引入以上约束并得到最优可行路径;
28、步骤s6:智能座舱模块通过增强现实技术将最优可行路径映射至相机实景画面上,并呈现于智能座舱显示屏上;位于智能座舱内的驾驶员根据增强现实路径引导进行远程操控,进一步行驶至终点位置;到达终点后,智能座舱模块通过矿车周身相机图像生成全景影像鸟瞰图,结合铲车铲臂的卫星天线定位信号,引导驾驶员精确微调自身姿态,方便后续铲车装载;
29、步骤s7:远程操控子系统切换操作对象,激活无人驾驶铲车的远程驾驶模式,由同一个驾驶员对铲车进行远程操控,进行矿料采集,并根据矿车位置执行装载作业;
30、步骤s8:装载作业完成后,铲车复位待命,等待下一辆矿车就位;如需移动,可由驾驶员远程驾驶无人驾驶铲车,驶离当前作业位置,进入下一个作业位置;
31、步骤s9:远程操控子系统切换操作对象,激活无人驾驶矿车的远程驾驶模式,驾驶员根据所述的全景影像鸟瞰图与增强现实路径进行倒车和行驶操作,操控满载的无人驾驶矿车驶离装载区,进入装载后等待区;
32、步骤s10:满载的无人驾驶矿车退出远程驾驶模式,通过车载自动驾驶子系统进入自动驾驶模式,行驶至卸载作业位置,至此,一个协同装载作业循环结束;
33、步骤s11:重复步骤s3至步骤s10,实现协同装载作业的循环。
34、本技术的有益效果如下:
35、(1)引入远程操控子系统,以人类驾驶员操控铲车与矿车进行精细的装载作业,与全自动驾驶技术相比,本方案采用的远程驾驶技术更成熟,系统复杂度和成本更低,且更适合精细装载作业;
36、(2)无人驾驶矿车与铲车的远程驾驶员为同一人,一人操纵多台车辆,节约用人成本;
37、(3)根据具体任务内容,本技术可实现自动驾驶与远程驾驶模式的切换,远程驾驶激活时可实现被操纵设备的切换,灵活选择工作方式与设备,使作业任务安全高效;
38、(4)引入路径规划模块与增强现实可视化、全景影像等方式,引导远程驾驶员安全快速驾驶车辆与调整姿态,提高远程驾驶的安全性和效率。
- 还没有人留言评论。精彩留言会获得点赞!