一种浮式系船柱控制装置、方法及存储介质与流程
本发明主要涉及航运交通,具体涉及一种浮式系船柱控制装置、方法及存储介质。
背景技术:
1、船闸是一种箱式通航建筑物,主要建设于水坝、渠化通航及运河的阶梯形纵断面处,用于连通不同水位落差的水面,使船舶直接通过落差,保障船舶通航。浮式系船柱是在船闸这类水位变化较大的场合,用于固定船舶的装置。
2、现行的浮式系船柱,主要还是需要船员主动系挂,船员操作系挂缆绳的方式较容易发生错误系挂缆绳、忘记系缆绳等情况,这些情况的出现会船闸的冲泄水过程出现危险,给船舶过闸带来安全风险。此外,由于船舶吃水深度不同、系船柱浮出水面的高度不同、船舶停靠距离系船柱不同,也会给船员系挂缆绳带来困难。
技术实现思路
1、本发明所要解决的技术问题是针对现有技术的不足,提供一种浮式系船柱控制装置、方法及存储介质。
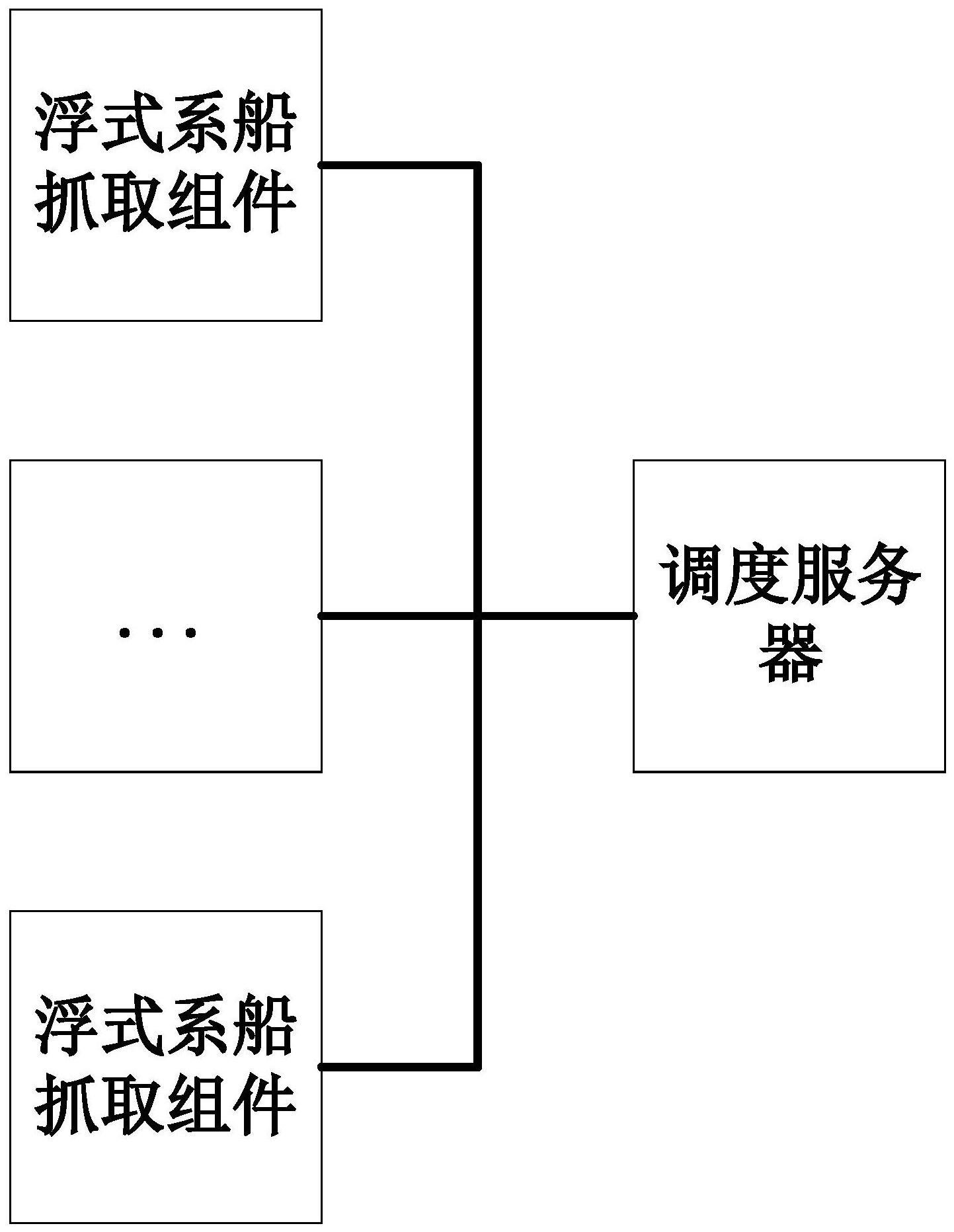
2、本发明解决上述技术问题的技术方案如下:一种浮式系船柱控制装置,包括调度服务器以及多个浮式系船抓取组件,
3、所述调度服务器与所有所述浮式系船抓取组件无线连接;
4、所述调度服务器用于依次向各个所述浮式系船抓取组件发送抓取缆绳信号;
5、所述浮式系船抓取组件用于根据所述抓取缆绳信号进行缆绳的抓取分析,得到抓取完成信号;
6、所述调度服务器还用于输入延时时间,并获取当前时间作为开始时间,并对所有得到抓取完成信号的浮式系船抓取组件发送放行信号;
7、所述浮式系船抓取组件还用于通过所述放行信号进行缆绳的摘取分析,得到摘取完成信号;
8、所述调度服务器还用于获取当前时间作为结束时间,根据所述开始时间、所述结束时间以及所述延时时间分析所有所述摘取完成信号的数量,得到浮式系船柱的控制结果。
9、本发明解决上述技术问题的另一技术方案如下:一种浮式系船柱控制方法,包括:
10、依次向各个浮式系船抓取组件发送抓取缆绳信号;
11、根据所述抓取缆绳信号进行缆绳的抓取分析,得到抓取完成信号;
12、输入延时时间,并获取当前时间作为开始时间,并对所有得到抓取完成信号的浮式系船抓取组件发送放行信号;
13、通过所述放行信号进行缆绳的摘取分析,得到摘取完成信号;
14、获取当前时间作为结束时间,根据所述开始时间、所述结束时间以及所述延时时间分析所有所述摘取完成信号的数量,得到浮式系船柱的控制结果。
15、本发明解决上述技术问题的另一技术方案如下:一种浮式系船柱控制装置,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,当所述处理器执行所述计算机程序时,实现如上所述的浮式系船柱控制方法。
16、本发明解决上述技术问题的另一技术方案如下:一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,当所述计算机程序被处理器执行时,实现如上所述的浮式系船柱控制方法。
17、本发明的有益效果是:通过向浮式系船抓取组件发送抓取缆绳信号,根据抓取缆绳信号进行缆绳的抓取分析得到抓取完成信号,对所有得到抓取完成信号的浮式系船抓取组件发送放行信号,通过放行信号进行缆绳的摘取分析,得到摘取完成信号,根据开始时间、结束时间以及延时时间分析所有摘取完成信号的数量,得到浮式系船柱的控制结果,有效地克服了船员漏系、错系缆绳的问题,解决了人员系缆绳不方便的情况,可以普遍用于港口、码头的船舶停靠系缆。
技术特征:
1.一种浮式系船柱控制装置,其特征在于,包括调度服务器以及多个浮式系船抓取组件,
2.根据权利要求1所述的浮式系船柱控制装置,其特征在于,所述浮式系船抓取组件包括机械手(1)、机械臂(2)、浮筒(3)以及系船柱(4),
3.根据权利要求2所述的浮式系船柱控制装置,其特征在于,所述浮式系船抓取组件中,通过所述抓取缆绳信号进行缆绳的抓取分析,得到抓取完成信号的过程包括:
4.根据权利要求3所述的浮式系船柱控制装置,其特征在于,所述控制器中,通过所述挂柱信号进行泄水状态的分析,根据分析结果得到抓取完成信号的过程包括:
5.根据权利要求2所述的浮式系船柱控制装置,其特征在于,所述浮式系船抓取组件中,通过所述放行信号进行缆绳的摘取分析,得到摘取完成信号的过程包括:
6.根据权利要求2所述的浮式系船柱控制装置,其特征在于,所述调度服务器中,根据所述开始时间、所述结束时间以及所述延时时间分析所有所述摘取完成信号的数量,得到浮式系船柱的控制结果的过程包括:
7.根据权利要求4所述的浮式系船柱控制装置,其特征在于,所述调度服务器还包括:
8.一种浮式系船柱控制方法,其特征在于,包括:
9.一种浮式系船柱控制系统,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,当所述处理器执行所述计算机程序时,实现如权利要求8所述的浮式系船柱控制方法。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,当所述计算机程序被处理器执行时,实现如权利要求8所述的浮式系船柱控制方法。
技术总结
本发明提供一种浮式系船柱控制装置、方法及存储介质,属于航运交通技术领域,包括调度服务器以及多个浮式系船抓取组件,调度服务器与所有浮式系船抓取组件无线连接;调度服务器用于依次向各个浮式系船抓取组件发送抓取缆绳信号;浮式系船抓取组件用于根据抓取缆绳信号进行缆绳的抓取分析得到抓取完成信号;调度服务器还用于输入延时时间,并获取当前时间作为开始时间,并对所有得到抓取完成信号的浮式系船抓取组件发送放行信号;浮式系船抓取组件还用于通过放行信号进行缆绳的摘取分析得到摘取完成信号。本发明有效地克服了船员漏系、错系缆绳的问题,解决了人员系缆绳不方便的情况,可以普遍用于港口、码头的船舶停靠系缆。
技术研发人员:王小林,刘心智,吴海金,邓健志,陈武奋,程小辉,姚杰森,邱永桦,王茀福,陈英,韦刚,王康,李星河
受保护的技术使用者:广西大藤峡水利枢纽开发有限责任公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!