一种物体动态感知方法及其装置与流程
本发明涉及物体动态感知,尤其涉及一种物体动态感知方法及其装置。
背景技术:
1、在现有技术中,物体动态感知是指在动态状态下对物体进行感知,其可以用于智能车辆、智能飞行器等方面,能够确认自身的当前位置,根据物体目标及途中情况,规划、路线,能够可靠识别路线,并可通过转向控制使自身按规定路线准确稳定行驶,在感知的过程中,能够可靠实现速度调节、距离保持、等各种必要基本操作,使得物体动态感知装置按时到达目的地,同时可以适用于不同的使用环境。
2、经检索,中国专利申请号为202010007798.8的专利,公开了一种感应动态物体的装置,包括:摄像头,软件系统所述摄像头是拥有镭射发射和接收功能或\和红外线发射和接收功能的图像帧获取装置,通过有线或\和无线网络(或线路)与所述软件系统相连,所述软件系统是接收摄像头图像帧数据并进行储存﹑分析和感应动态的系统。
3、上述专利中的一种感应动态物体的装置存在以下不足:在进行动态感应时,虽然利用摄像头和软件系统可以实现物体的动态感应,但是其感应方式较为单一,使得在感知时无法多方面、多维度进行物体动态感应,从而使得整个感知过程存在缺陷。
技术实现思路
1、本发明的目的是为了解决现有技术中存在的缺点,而提出的一种物体动态感知方法及其装置。
2、为了实现上述目的,本发明采用了如下技术方案:
3、一种物体动态感知方法,包括以下步骤:
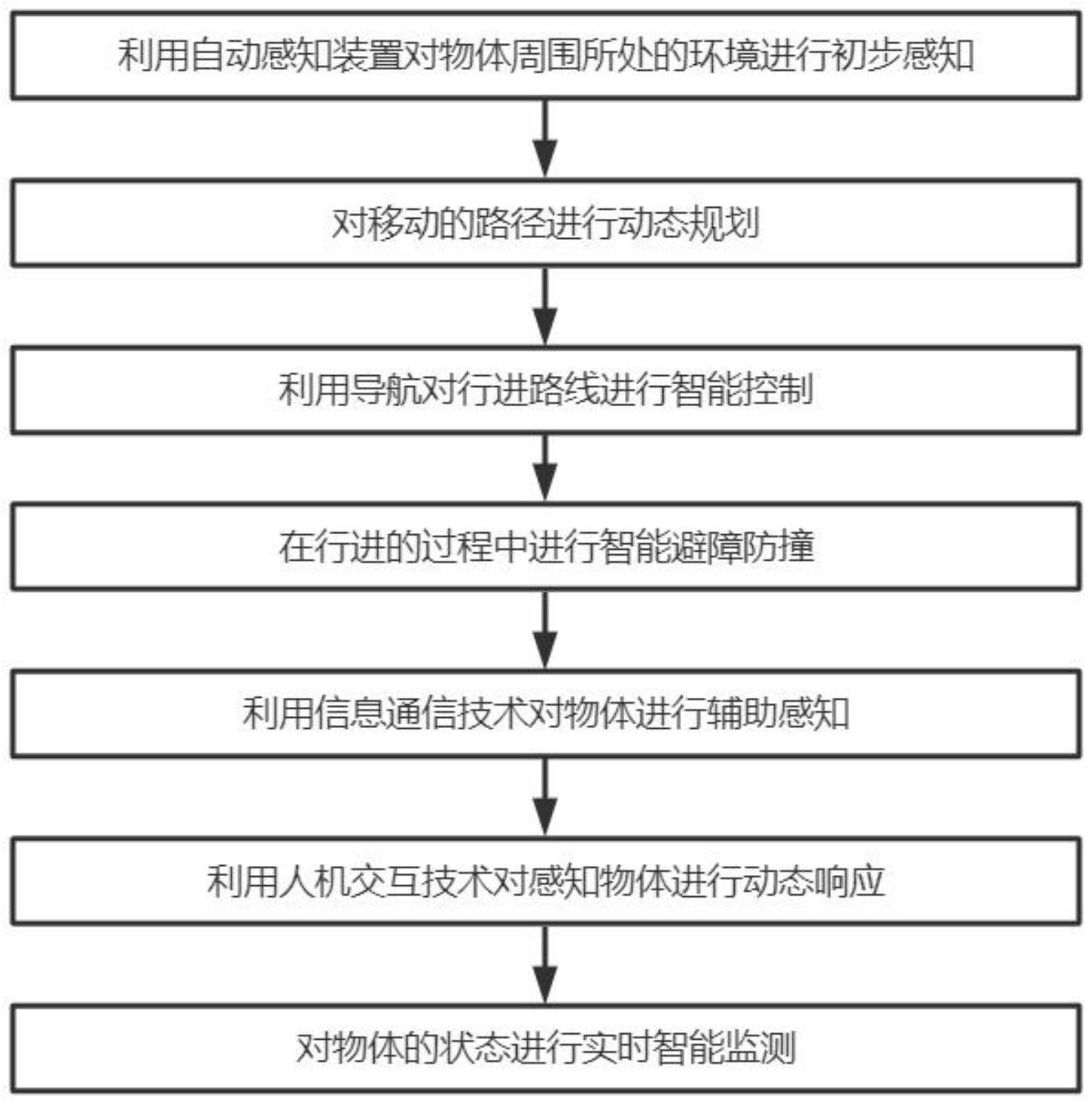
4、s1:利用自动感知装置对物体周围所处的环境进行初步感知;
5、s2:对移动的路径进行动态规划;
6、s3:利用导航对行进路线进行智能控制;
7、s4:在行进的过程中进行智能避障防撞;
8、s5:利用信息通信技术对物体进行辅助感知;
9、s6:利用人机交互技术对感知物体进行动态响应;
10、s7:对物体的状态进行实时智能监测。
11、优选的:所述s1步骤中的利用自动感知装置对物体周围所处的环境进行初步感知基于自身行驶性能和共识规则,识别并规划出可保证规范、安全、迅速到达目的地的移动路径,所述初步感知方法,包括以下步骤:
12、s11:基于机器视觉获取物体周边环境两维或三维图像信息,利用图像分析识别技术对行驶环境进行感知;
13、s12:基于激光雷达获取车辆周边环境两维或三维距离信息,利用距离分析识别技术对行驶环境进行感知;
14、所述s2步骤中的对移动的路径进行动态规划针对物体边缘、中间隔离物和路况进行甄别;
15、对物体的周边特征,包括地面上可能影响通过性、安全性的其它各种移动或静止物体的识别。
16、优选的:所述s3步骤中的利用导航对行进路线进行智能控制利用刹用传感器、计算机和控制系统进行定位、导航和控制,其智能控制方法,包括以下步骤:
17、s31:将位置、速度、加速度信息利用传感器传递绐计算机;
18、s32:计算机根据传感器检测的信息,利用规划算法,计算出机器人或者其他自动系统的行为,并将这些行为传递给控制系统;
19、s33:控制系统根据计算机计算出的行为,控制自动感知装置的行为,定位、导航和控制。
20、优选的:所述s4步骤中的在行进的过程中进行智能避障防撞包括以下步骤:
21、s41:监测道路的占用和障碍物,根据任务提前规划通道,结合弧度算法,设置多种行进策略;
22、s42:利用自适应算法对自动感知装置进行倾斜监测,姿态监测、速度自适应检测功能,利用错误自诊断及监测系统,进行安全问题监测;
23、s43:利用独立安全控制回路,在自动感知装置在车体故障进行安全保障,利用全面安全感知系统,进行360°的安全保障。
24、优选的:所述s6步骤中的利用信息通信技术对物体进行辅助感知包括以下步骤:
25、s61:对信息发送者、信息接受者和信息载体进行获取;
26、s62:通过并行通信在计算机和终端之间以及主机系统与直机系统之间进行的一组数据的各个数据位在多条通信线上被同时传输。
27、优选的:所述s7步骤中的对物体的状态进行实时智能监测,包括以下步骤:
28、s71:将自动感知装置的停机、待机、运行状态进行实时记录实现对于自动感知装置状态监测的可视化;
29、s72:现场操作人员根据设备当前状态,触发控制设备上对应状态按钮;
30、s73:按钮盒将信号发射给网关,经过解析,通过软件实现设备状态的记录和大屏幕展示;
31、s74:软件后台可提供基于各种状态的统计和,基于运行状态的设备利用率统计,基于故障和维修状态的设备故障率统计,为操作人员提供数据报表支撑。
32、一种物体动态感知装置,包括自检监控模组、环境信息获取模组、数据处理模组、接口模组和控制模组,所述自检监控模组实时获取和处理自动感知装置传感器的输入信息如电压、电流、温度、压力,诊断自动感知装置是否处于危险状态或具有潜在的危险,并将诊断结果信息提供控制人员,做出正确的车辆控制决策提供依据。
33、在前述方案的基础上:所述环境信息获取模组基于自动感知装置传感信息获取系统,利用技术平台和通信系统,获取自动感知装置周边物体状态,并将信息提供给控制人员;
34、所述数据处理模组对输入的各种传感器的数据进行有效处理,为自动感知装置提供位置、距离偏差及方位偏差信息。
35、在前述方案的基础上优选的:所述接口模组用于对自动感知装置进行启动、监视和终止车辆自动控制操作的接口,该接口可接收操作人员的控制请求、感知环境、自检、控制状态反馈信息,对自动感知装置控制方式作出选择。
36、在前述方案的基础上进一步优选的:所述控制模组提供各种水平的自动感知装置控制功能,接收自动感知装置控制方式选择、自检、自身及周边物体状态、环境信息,为实现自动感知装置跟踪、定位进行必要的操作。
37、本发明的有益效果为:
38、1.利用自动感知装置对物体周围所处的环境进行初步感知,从而使得自动感知装置可以根据自身行驶性能和共识规则,识别并规划出可保证规范、安全、迅速到达目的地的移动路径。
39、2.通过设置有自检监控模组可以实时获取和处理自动感知装置传感器的输入信息如电压、电流、温度、压力,从而可以诊断自动感知装置是否处于危险状态或具有潜在的危险。
40、3.通过设置有环境信息获取模组可以保证自动感知装置传感信息获取系统,获取自动感知装置周边物体状态,并将信息提供给控制人员,从而便于控制人员可以第一时间对信息进行掌控。
41、4.通过设置有制模组提供各种水平的自动感知装置控制功能,通过系统控制方式选择、自检、自身及周边物体状态、环境等信息,为实现自动感知装置跟踪、定位进行必要的基本操作。
技术特征:
1.一种物体动态感知方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种物体动态感知方法,其特征在于,所述s1步骤中的利用自动感知装置对物体周围所处的环境进行初步感知基于自身行驶性能和共识规则,识别并规划出可保证规范、安全、迅速到达目的地的移动路径,所述初步感知方法,包括以下步骤:
3.根据权利要求2所述的一种物体动态感知方法,其特征在于,所述s3步骤中的利用导航对行进路线进行智能控制利用刹用传感器、计算机和控制系统进行定位、导航和控制,其智能控制方法,包括以下步骤:
4.根据权利要求3所述的一种物体动态感知方法,其特征在于,所述s4步骤中的在行进的过程中进行智能避障防撞包括以下步骤:
5.根据权利要求4所述的一种物体动态感知方法,其特征在于,所述s6步骤中的利用信息通信技术对物体进行辅助感知包括以下步骤:
6.根据权利要求5所述的一种物体动态感知方法,其特征在于,所述s7步骤中的对物体的状态进行实时智能监测,包括以下步骤:
7.一种物体动态感知装置,其特征在于,包括自检监控模组、环境信息获取模组、数据处理模组、接口模组和控制模组,所述自检监控模组实时获取和处理自动感知装置传感器的输入信息如电压、电流、温度、压力,诊断自动感知装置是否处于危险状态或具有潜在的危险,并将诊断结果信息提供控制人员,做出正确的车辆控制决策提供依据。
8.根据权利要求7所述的一种物体动态感知装置,其特征在于,所述环境信息获取模组基于自动感知装置传感信息获取系统,利用技术平台和通信系统,获取自动感知装置周边物体状态,并将信息提供给控制人员;
9.根据权利要求8所述的一种物体动态感知装置,其特征在于,所述接口模组用于对自动感知装置进行启动、监视和终止车辆自动控制操作的接口,该接口可接收操作人员的控制请求、感知环境、自检、控制状态反馈信息,对自动感知装置控制方式作出选择。
10.根据权利要求9所述的一种物体动态感知装置,其特征在于,所述控制模组提供各种水平的自动感知装置控制功能,接收自动感知装置控制方式选择、自检、自身及周边物体状态、环境信息,为实现自动感知装置跟踪、定位进行必要的操作。
技术总结
本发明公开了一种物体动态感知方法及其装置,涉及物体动态感知技术领域;为了提高动态感知效果;该感知方法具体包括以下步骤:利用自动感知装置对物体周围所处的环境进行初步感知;对移动的路径进行动态规划;利用导航对行进路线进行智能控制;该感知装置,包括自检监控模组、环境信息获取模组、数据处理模组、接口模组和控制模组,所述自检监控模组实时获取和处理自动感知装置传感器的输入信息如电压、电流、温度、压力。本发明利用自动感知装置对物体周围所处的环境进行初步感知,从而使得自动感知装置可以根据自身行驶性能和共识规则,识别并规划出可保证规范、安全、迅速到达目的地的移动路径。
技术研发人员:陈体涛,冯陈
受保护的技术使用者:浙江中芯数字科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!