一种配网架空线路无人机巡检系统的制作方法
本申请涉及配网,具体涉及一种配网架空线路无人机巡检系统。
背景技术:
1、配网架空线路的安全运行具有重要意义,目前,配网架空线路的安全运行往往需要消耗大量的人力、物力和财力。因此,需要采取自动化的安全维护措施实现对配网架空线路的维护。现有技术中,在对配网架空线路的维护过程中,对配网架空线路的巡检是发现问题的重要步骤,由于配网架空线路运行环境恶劣,巡检人员在巡检过程中可能会发生危险,因此,近年来采用无人机进行巡检,现有技术中的配网架空线路无人机巡检技术往往无法对无人机的飞行轨迹进行准确性判断,也无法对无人机采集的图像进行自动识别,需要人工识别,不仅效率低,且浪费了大量的人力物力。因此,设计一种配网架空线路无人机巡检系统及方法是十分有必要的。
技术实现思路
1、本申请的目的在于提出一种配网架空线路无人机巡检系统,能够实现对无人机航线的监测判断以及对无人机采集的图像进行分类识别,进而实现对故障情况的判断,提高了识别效率。
2、为实现上述目的,本申请实施例提供一种配网架空线路无人机巡检系统,包括:无人机本体、航线规划模块、数据采集模块、中央处理模块、实际航线采集模块及航线准确性验证模块;所述航线规划模块连接所述无人机本体,所述航线规划模块用于给所述无人机本体规划目标航线;所述无人机本体上设置所述数据采集模块及实际航线采集模块,所述数据采集模块用于采集巡检图像,所述实际航线采集模块用于采集无人机本体的实际航线,所述航线规划模块及实际航线采集模块连接所述航线准确性验证模块,所述航线准确性验证模块及所述数据采集模块连接所述中央处理模块,所述中央处理模块用于根据所述数据采集模块采集的巡检图像判断配网架空线路是否发生故障,所述航线准确性验证模块用于验证实际航线与航线规划模块规划的目标航线是否在误差允许范围内。
3、所述实际航线采集模块包括标识及实际航线监测设备;
4、其中,根据不同类型的无人机,在所述无人机本体上选择3个标识点设置所述标识;所述目标航线的采集点附近设置所述实际航线监测设备,所述实际航线监测设备用于对所述无人机本体及所述标识进行识别,获取所述无人机本体的实际航线,所述实际航线监测设备连接所述中央处理模块。
5、本申请实施例还提供一种根据上述的配网架空线路无人机巡检系统的巡检方法,包括如下步骤:
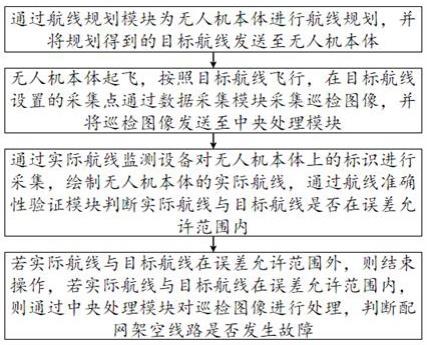
6、通过航线规划模块为无人机本体进行航线规划,并将规划得到的目标航线发送至无人机本体;
7、无人机本体起飞,按照目标航线飞行,在目标航线设置的采集点通过数据采集模块采集巡检图像,并将巡检图像发送至中央处理模块;
8、通过实际航线监测设备对无人机本体上的标识进行采集,绘制无人机本体的实际航线,通过航线准确性验证模块判断实际航线与目标航线是否在误差允许范围内;
9、若实际航线与目标航线在误差允许范围外,则结束操作,若实际航线与目标航线在误差允许范围内,则通过中央处理模块对巡检图像进行处理,判断配网架空线路是否发生故障。
10、在一些方案中,所述通过航线规划模块为无人机本体进行航线规划,具体包括:
11、获取目标电缆的布置轨迹,设置与布置轨迹平行等距的绕飞航线;
12、设置无人机的飞行参数,包括转弯半径、最大转弯角度、飞行高度以及与目标电缆之间的距离;
13、获取绕飞航线的需要转弯的转弯区域,判断转弯区域的转弯角度是否大于无人机飞行参数中的最大转弯角度,若大于,则设立转弯航线,从绕飞航线进入转弯航线,经过转弯航线驶过转弯区域,重新进入绕飞航线,若小于或者等于,则直接偏转转弯角度,驶过转弯区域;
14、在绕飞航线上选取多个采集点,用于实现对巡检图像的采集。
15、在一些方案中,所述设立转弯航线,从绕飞航线进入转弯航线,经过转弯航线驶过转弯区域,重新进入绕飞航线,具体包括:
16、设立矩形转弯航线,从转弯区域的转弯点处进入矩形转弯航线,其中,进入矩形转弯航线的方向与转弯后的方向呈90°角,经过转弯航线重新进入绕飞航线,驶至下一采集点,其中,无人机飞行参数中的最大转弯角度应大于或等于90°。
17、在一些方案中,所述通过实际航线监测设备对无人机本体上的标识进行采集,绘制无人机本体的实际航线,通过航线准确性验证模块判断实际航线与目标航线是否在误差允许范围内,具体包括:
18、当所述无人机本体飞至所述实际航线监测设备的监测范围内,所述实际航线监测设备对所述无人机本体进行拍摄获得监测图像,并将其发送至中央处理模块;
19、所述中央处理模块根据不同时刻的监测图像获取不同时刻的无人机本体的位置,根据不同时刻的无人机本体的位置,绘制无人机本体实际航线的飞行轨迹,并将其与目标航线进行对比,计算无人机本体的实际航线与目标航线在水平位置上的最大水平误差及平均水平误差以及在竖直位置上的最大高度误差及平均高度误差;
20、所述中央处理模块分别判断最大水平误差、平均水平误差、最大高度误差及平均高度误差是否超过其对应的预设阈值,若平均水平误差及平均高度误差未超过预设阈值,则判断实际航线与目标航线在误差允许范围内,若最大水平误差及最大高度误差超过其对应的预设阈值,则将超过预设阈值处位置附近采集点的巡检图像删除,若平均水平误差或平均高度误差超过预设阈值,则判断实际航线与目标航线不在误差允许范围内,此时,不再对此次巡检进行故障判断。
21、在一些方案中,所述通过中央处理模块对巡检图像进行处理,判断配网架空线路是否发生故障,具体包括:
22、所述中央处理模块获取巡检图像,并对其进行预处理;
23、所述中央处理模块搭建架空线路隐患分类模型,获取隐患分类数据集,并通过隐患分类数据集对架空线路隐患分类模型进行训练;
24、所述中央处理模块搭建故障识别模型,获取故障识别数据集,并通过故障识别数据集对故障识别模型进行训练;
25、将预处理过后的巡检图像输入架空线路隐患分类模型中,对巡检图像进行分类,将其分为第一隐患类型及第二隐患类型;
26、将第二隐患类型的巡检图像输入故障识别模型中,对第二隐患类型的巡检图像进行故障识别,得到故障情况。
27、本申请实施例具有以下有益效果:
28、通过航线规划模块能够为无人机本体进行目标航线的规划,且能够对转弯角度过大的转弯区域进行转弯航线规划,防止因转弯角度过大导致实际航线偏离目标航线,通过数据采集模块能够对巡检图像进行采集,通过实际航线采集模块采集无人机本体的实际航线,通过航线准确性验证模块对实际航线及目标航线进行判断,判断实际航线与目标航线是否在误差允许范围内,若不在,则不对此次巡检图像进行处理,防止无效操作,通过中央处理模块对巡检图像进行分类,并对分类后的巡检图像进行故障识别,实现巡检。
技术特征:
1.一种配网架空线路无人机巡检系统,其特征在于,包括:无人机本体、航线规划模块、数据采集模块、中央处理模块、实际航线采集模块及航线准确性验证模块;所述航线规划模块连接所述无人机本体,所述航线规划模块用于给所述无人机本体规划目标航线;所述无人机本体上设置所述数据采集模块及实际航线采集模块,所述数据采集模块用于采集巡检图像,所述实际航线采集模块用于采集无人机本体的实际航线,所述航线规划模块及实际航线采集模块连接所述航线准确性验证模块,所述航线准确性验证模块及所述数据采集模块连接所述中央处理模块,所述中央处理模块用于根据所述数据采集模块采集的巡检图像判断配网架空线路是否发生故障,所述航线准确性验证模块用于验证实际航线与航线规划模块规划的目标航线是否在误差允许范围内。
2.根据权利要求1所述的系统,其特征在于,所述实际航线采集模块包括标识及实际航线监测设备;
3.一种根据权利要求1或2所述的配网架空线路无人机巡检系统的巡检方法,包括如下步骤:
4.根据权利要求3所述的方法,其特征在于,所述通过航线规划模块为无人机本体进行航线规划,具体包括:
5.根据权利要求4所述的方法,其特征在于,所述设立转弯航线,从绕飞航线进入转弯航线,经过转弯航线驶过转弯区域,重新进入绕飞航线,具体包括:
6.根据权利要求3所述的方法,其特征在于,所述通过实际航线监测设备对无人机本体上的标识进行采集,绘制无人机本体的实际航线,通过航线准确性验证模块判断实际航线与目标航线是否在误差允许范围内,具体包括:
7.根据权利要求3所述的方法,其特征在于,所述通过中央处理模块对巡检图像进行处理,判断配网架空线路是否发生故障,具体包括:
技术总结
本申请涉及一种配网架空线路无人机巡检系统及其巡检方法,包括:无人机本体、航线规划模块、数据采集模块、中央处理模块、实际航线采集模块及航线准确性验证模块;航线规划模块用于给无人机本体规划目标航线;无人机本体上设置数据采集模块及实际航线采集模块,数据采集模块用于采集巡检图像,实际航线采集模块用于采集无人机本体的实际航线,航线规划模块及实际航线采集模块连接航线准确性验证模块,航线准确性验证模块及数据采集模块连接中央处理模块,中央处理模块用于根据数据采集模块采集的巡检图像判断配网架空线路是否发生故障,航线准确性验证模块用于验证实际航线与航线规划模块规划的目标航线是否在误差允许范围内。
技术研发人员:熊彪,江浩,郭广,吴育青,潘杰,张佰玲,马楠,邓浩,黄湛华,李俊彤,杨辉,杨蓝文,胡永沈,伍炜卫,黄万杰
受保护的技术使用者:深圳供电局有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!