自动行驶方法、作业车辆以及自动行驶系统与流程
本发明涉及在田地中进行作业车辆的自动行驶的自动行驶方法、作业车辆以及自动行驶系统。
背景技术:
1、以往,联合收割机等作业车辆构成为能够基于预先设定的行驶路径进行自动行驶,例如生成包含伴随收割作业的多条直行路径、和将各直行路径相连的转弯路径的行驶路径。在作业车辆的基于转弯路径进行的转弯行驶中,预先设定转弯半径、转弯车速。
2、例如,专利文献1中公开的收获机具备:收获行驶形态选择部,选择收获行驶形态;重叠值设定部,设定重叠的重叠值;行驶路径计算部,以按根据收获宽度和重叠值决定的路径间隔网罗作业对象区域的方式,根据收获行驶形态算出行驶路径;自车位置计算部,算出自车位置;控制指令生成部,基于行驶路径与自车位置之间的偏差及重叠值,生成控制指令;以及自动行驶控制部,基于控制指令进行转向操纵控制。
3、专利文献1:日本专利第6983734号
4、作为作业车辆的联合收割机一边进行自动行驶一边进行收割作业,并一边将收获物贮存于谷物箱一边继续自动行驶。联合收割机有时由于收获物的贮存量而机体的重量变化,转弯行驶时的离心力变化,因此,在预先设定的转弯路径保持原样地进行转弯行驶时,有可能从转弯路径脱离,自动行驶的精度恶化。另外,作业车辆有时由于机体相对于田地地面的倾斜角度而转弯行驶时的离心力变化,在这样的情况下,也可能脱离预先设定的转弯路径。作业车辆在转弯路径的转弯角度比较大的情况下,也有可能由于转弯半径、转弯车速而脱离预先设定的转弯路径。
技术实现思路
1、本发明的目的在于提供一种能够抑制从转弯路径的脱离而提升自动行驶的精度的自动行驶方法、作业车辆以及自动行驶系统。
2、为了解决上述课题,本发明的自动行驶方法是基于预先设定的行驶路径进行作业车辆的自动行驶的自动行驶方法,其特征在于,具有:自动行驶工序,基于包含转弯路径的上述行驶路径进行自动行驶;和贮存量检测工序,检测上述作业车辆中贮存的收获物的贮存量,在上述自动行驶工序中,基于上述贮存量进行与上述转弯路径的行驶有关的转弯参数的变更。
3、或者,本发明的自动行驶方法是基于预先设定的行驶路径进行作业车辆的自动行驶的自动行驶方法,其特征在于,具有:自动行驶工序,基于包含转弯路径的上述行驶路径进行自动行驶;和倾斜角度检测工序,检测上述作业车辆相对于田地地面的倾斜角度,在上述自动行驶工序中,基于上述倾斜角度进行与上述转弯路径的行驶有关的转弯参数的变更。
4、或者,本发明的自动行驶方法是基于预先设定的行驶路径进行作业车辆的自动行驶的自动行驶方法,其特征在于,具有:自动行驶工序,基于包含转弯路径的上述行驶路径进行自动行驶;和转弯角度检测工序,基于上述行驶路径检测上述转弯路径的转弯角度,在上述自动行驶工序中,基于上述转弯角度进行与上述转弯路径的行驶有关的转弯参数的变更。
5、另外,为了解决上述课题,本发明的作业车辆是基于预先设定的行驶路径进行自动行驶的作业车辆,其特征在于,具备:自动行驶控制部,基于包含转弯路径的上述行驶路径控制自动行驶;和贮存量检测部,检测上述作业车辆中贮存的收获物的贮存量,上述自动行驶控制部基于上述贮存量进行与上述转弯路径的行驶有关的转弯参数的变更。
6、另外,为了解决上述课题,本发明的自动行驶系统是基于预先设定的行驶路径进行作业车辆的自动行驶的自动行驶系统,其特征在于,具备:自动行驶控制部,基于包含转弯路径的上述行驶路径控制自动行驶;和贮存量检测部,检测上述作业车辆中贮存的收获物的贮存量,上述自动行驶控制部基于上述贮存量进行与上述转弯路径的行驶有关的转弯参数的变更。
7、根据本发明,可以提供一种能够抑制从转弯路径的脱离而提升自动行驶的精度的自动行驶方法、作业车辆以及自动行驶系统。
技术特征:
1.一种自动行驶方法,是基于预先设定的行驶路径进行作业车辆的自动行驶的自动行驶方法,其特征在于,具有:
2.根据权利要求1所述的自动行驶方法,其特征在于,
3.根据权利要求1所述的自动行驶方法,其特征在于,
4.根据权利要求1所述的自动行驶方法,其特征在于,
5.根据权利要求1所述的自动行驶方法,其特征在于,
6.根据权利要求1所述的自动行驶方法,其特征在于,
7.根据权利要求1所述的自动行驶方法,其特征在于,
8.根据权利要求1所述的自动行驶方法,其特征在于,
9.一种自动行驶方法,是基于预先设定的行驶路径进行作业车辆的自动行驶的自动行驶方法,其特征在于,具有:
10.一种自动行驶方法,是基于预先设定的行驶路径进行作业车辆的自动行驶的自动行驶方法,其特征在于,具有:
11.一种作业车辆,是基于预先设定的行驶路径进行自动行驶的作业车辆,其特征在于,具备:
12.一种自动行驶系统,是基于预先设定的行驶路径进行作业车辆的自动行驶的自动行驶系统,其特征在于,具备:
技术总结
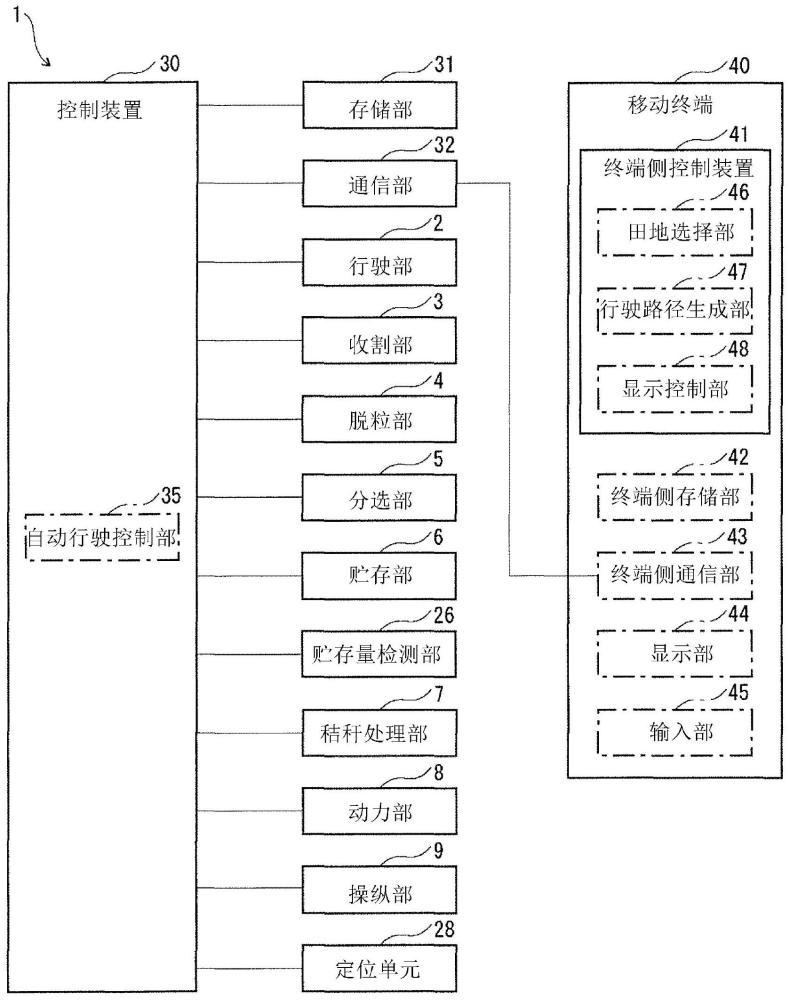
本发明提供一种能够抑制从转弯路径的脱离而提升自动行驶的精度的自动行驶方法、作业车辆以及自动行驶系统。联合收割机(1)是基于预先设定的行驶路径(53)进行自动行驶的作业车辆,具备控制装置(30)及贮存量检测部(26)。控制装置(30)作为基于包含转弯路径(55)的行驶路径(53)控制自动行驶的自动行驶控制部(35)发挥功能。贮存量检测部(26)检测联合收割机(1)的贮存部(6)中贮存的谷粒(收获物)的贮存量。而且,自动行驶控制部(35)基于贮存量进行与转弯路径(55)的行驶有关的转弯参数的变更。
技术研发人员:山口雄司,村山昌章,西井康人,田中泰史
受保护的技术使用者:洋马控股株式会社
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!