一种驾驶员在环的船舶远程驾驶半实物仿真测试平台
本发明涉及船舶驾驶仿真测试领域,尤其是一种驾驶员在环的船舶远程驾驶半实物仿真测试平台。
背景技术:
1、目前,由于船舶行驶距离远、周期长且成本高,现实中难以测试船舶远程驾驶获得测试数据。而驾驶员在环是一种通过虚拟仿真的手段,利用动态驾驶员模拟器、环境视听模拟设备及相关检测设备重现“人-船舶-环境”,在实际船舶驾驶中相互作用的测试系统。
2、虽然,现有技术可以实现对陆地行车的地面仿真试验平台,但船舶航行与陆地行车有巨大差别,由于水上航行受风浪等因素的影响,船舶航行相较于在固定路面的行车有更多的不确定性,针对陆地行车的地面仿真试验平台不适用于水上航行的船舶远程驾驶仿真测试。因此,如何构建驾驶员在环的船舶远程驾驶仿真测试平台,是一个具有重要意义的研究问题。
技术实现思路
1、有鉴于此,本发明实施例提供一种驾驶员在环的船舶远程驾驶半实物仿真测试平台,用于构建驾驶员在环的船舶远程驾驶仿真测试平台,为船舶远程控制仿真提供仿真测试条件。
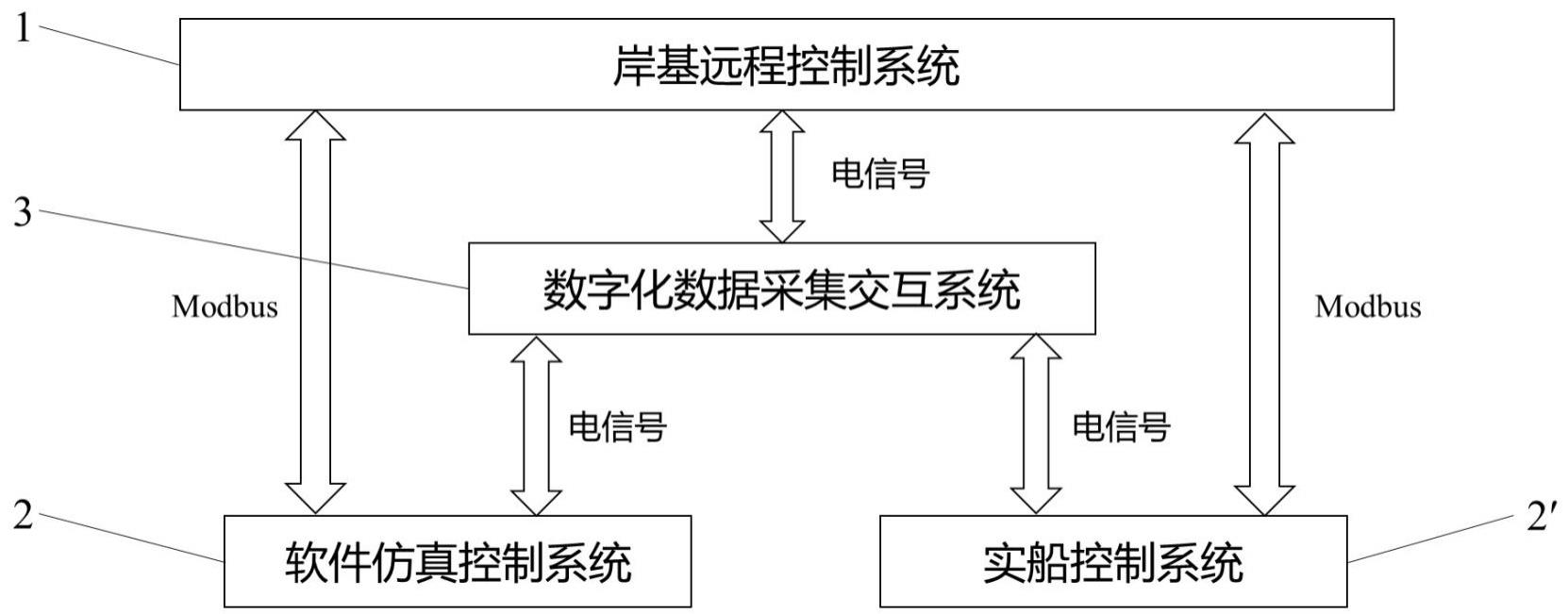
2、本发明实施例的一方面提供了一种驾驶员在环的船舶远程驾驶半实物仿真测试平台,包括:
3、岸基远程控制系统,用于发布控制指令并接收状态反馈;
4、信号控制系统,与所述岸基远程控制系统连接,用于为船舶控制网络提供运行环境和信号激励;
5、数字化数据采集交互系统,与所述岸基远程控制系统连接,用于将其输出信号转换为数字信号,或将数字信号转换为所述岸基远程控制系统所需的输入信号;与所述信号控制系统连接,用于将所述信号控制系统输出的数字信号转换为开关量信号,或将开关量信号转换为所述信号控制系统所需的数字信号;
6、所述岸基远程控制系统包括一个驾驶员在环的船舶远程驾驶控制台和两个相同的可编程船舶控制柜,所述驾驶员在环的船舶远程驾驶控制台与所述可编程船舶控制柜连接;
7、所述驾驶员在环的船舶远程驾驶控制台包括中央控制单元、人机交互显示屏和驾控台输入输出单元;
8、所述中央控制单元包括modbus网关,所述中央控制单元用于船舶控制监测与诊断;
9、所述人机交互显示屏,用于船舶航行状态显示和故障报警诊断;
10、所述可编程船舶控制柜,用于操控船舶航行。
11、可选地,每个所述可编程船舶控制柜包括温度采集输入单元、定位单元、船舶运动状态监测单元、船舶控制单元、开关、接触器、继电器、可调电阻箱和船舶输入输出单元;
12、所述船舶输入输出单元与所述船舶运动状态监测单元以及船舶控制单元连接,且连接到所述modbus网关,所述船舶输入输出单元还分别与所述开关或接触器或继电器连接;所述温度采集输入单元与所述可调电阻箱连接;
13、所述船舶输入输出单元用于采集所述开关或接触器的状态输入或输出,控制所述继电器;所述温度采集输入单元用于采集所述可调电阻箱的模拟阻值。
14、可选地,所述定位单元与所述船舶输入输出单元连接,用于将船舶实时定位数据通过船舶输入输出单元传输至岸基远程控制系统。
15、可选地,所述船舶控制单元与船舶输入输出单元连接,用于将所收到的控制指令通过船舶输入输出单元传输至船舶螺旋桨与舵机,以操控船舶航行。
16、可选地,所述中央控制单元和所述人机交互显示屏还用于上载程序,执行所述程序用于对船舶的航行控制、航行状态监测以及机电设备状态诊断。
17、可选地,所述驾驶员在环的船舶远程驾驶控制台还包括与所述输入输出单元连接的开关、指示灯和控制器;
18、所述驾控台输入输出单元,用于采集船载设备状态以及航行动态数据,并通过指示灯输出预设的提醒状态;
19、所述驾驶员在环的船舶远程驾驶控制台还包括输入模块,所述输入模块用于根据驾驶员对方向盘、桨舵控制手柄的操控生成操作指令,将所述操作指令作为输入传输至所述岸基远程控制系统。
20、可选地,所述信号控制系统包括软件仿真控制系统,和/或,实船控制系统。
21、可选地,所述软件仿真控制系统包括控制器仿真模块和船舶虚拟视景仿真模块;所述控制器仿真模块与所述船舶虚拟视景仿真模块通过共享内存交互数据;
22、所述控制器仿真模块包括定航向控制模块、定航速控制模块以及手动控制模块;
23、所述船舶虚拟视景仿真模块包括航行视频监控模块、虚拟场景定义模块、航行人机交互模块、航行动态数据显示模块、安全预警系统模块、航速控制模块、航向控制模块、网络性能检测模块以及船岸通信模块;
24、所述控制器仿真模块中的航向控制模块、定航速控制模块以及手动控制模块均与航行视频监控模块、虚拟场景模块、航行人机交互模块、航行动态数据显示模块、安全预警系统模块、网路性能检测模块以及通信模块连接;
25、所述定航向控制模块与航向控制模块连接;所述定航速控制模块与航速控制模块连接。
26、可选地,所述软件仿真控制系统还包括运行有仿真软件的计算机,所述计算机包括5g/4g、wlan、modbus通信和以太网对应的通信接口,以及通信功能。
27、可选地,所述数字化数据采集交互系统采用plc控制系统,包括依次连接的cpu模块、以太网通信模块、数字输入输出模块和模拟输入输出模块;所述以太网通信模块与所述软件仿真控制系统连接,所述数字输入输出模块与所述岸基远程控制系统连接;
28、所述数字化数据采集交互系统,还用于加载应用软件;所述应用软件用于为所述岸基远程控制系统提供可控的数字输入、输出以及模拟量输入,以及为所述的软件仿真控制系统提供仿真控制模型由开关量转化的数字信号。
29、本发明的仿真测试平台包括岸基远程控制系统、信号控制系统以及数字化数据采集交互系统;其中,岸基远程控制系统包括一个驾驶员在环的船舶远程驾驶控制台和两个相同的可编程船舶控制柜,驾驶员在环的船舶远程驾驶控制台与可编程船舶控制柜连接;驾驶员在环的船舶远程驾驶控制台包括中央控制单元、人机交互显示屏和驾控台输入输出单元;通过本发明可以实现驾驶员在环的船舶远程控制的半实物仿真测试,可以及时获取大量的船舶远行数据,例如在不同程度的风浪或连续多变的天气的影响下的航行数据,进而将航行数据用于仿真,相比于现有技术仅在固定的行驶环境中进行仿真测试,本发明的适用范围更广,稳定性更强;而且,本发明还包括驾驶员在环控制,且信号控制系统可以为仿真测试提供软件运行环境,岸基远程控制系统和数字化数据采集交互系统可以为仿真测试提供实物基础,实现了半实物的仿真测试,可降低船舶远程控制仿真的周期与实现难度。
技术特征:
1.一种驾驶员在环的船舶远程驾驶半实物仿真测试平台,其特征在于,包括:
2.根据权利要求1所述的一种驾驶员在环的船舶远程驾驶半实物仿真测试平台,其特征在于,每个所述可编程船舶控制柜包括温度采集输入单元、定位单元、船舶运动状态监测单元、船舶控制单元、开关、接触器、继电器、可调电阻箱和船舶输入输出单元;
3.根据权利要求2所述的一种驾驶员在环的船舶远程驾驶半实物仿真测试平台,其特征在于,所述定位单元与所述船舶输入输出单元连接,用于将船舶实时定位数据通过船舶输入输出单元传输至岸基远程控制系统。
4.根据权利要求2所述的一种驾驶员在环的船舶远程驾驶半实物仿真测试平台,其特征在于,所述船舶控制单元与船舶输入输出单元连接,用于将所收到的控制指令通过船舶输入输出单元传输至船舶螺旋桨与舵机,以操控船舶航行。
5.根据权利要求1所述的一种驾驶员在环的船舶远程驾驶半实物仿真测试平台,其特征在于,所述中央控制单元和所述人机交互显示屏还用于上载程序,执行所述程序用于对船舶的航行控制、航行状态监测以及机电设备状态诊断。
6.根据权利要求1所述的一种驾驶员在环的船舶远程驾驶半实物仿真测试平台,其特征在于,所述驾驶员在环的船舶远程驾驶控制台还包括与所述输入输出单元连接的开关、指示灯和控制器;
7.根据权利要求1所述的一种驾驶员在环的船舶远程驾驶半实物仿真测试平台,其特征在于,所述信号控制系统包括软件仿真控制系统,和/或,实船控制系统。
8.根据权利要求7所述的一种驾驶员在环的船舶远程驾驶半实物仿真测试平台,其特征在于,所述软件仿真控制系统包括控制器仿真模块和船舶虚拟视景仿真模块;所述控制器仿真模块与所述船舶虚拟视景仿真模块通过共享内存交互数据;
9.根据权利要求7所述的一种驾驶员在环的船舶远程驾驶半实物仿真测试平台,其特征在于,所述软件仿真控制系统还包括运行有仿真软件的计算机,所述计算机包括5g/4g、wlan、modbus通信和以太网对应的通信接口,以及通信功能。
10.根据权利要求7所述的一种驾驶员在环的船舶远程驾驶半实物仿真测试平台,其特征在于,所述数字化数据采集交互系统采用plc控制系统,包括依次连接的cpu模块、以太网通信模块、数字输入输出模块和模拟输入输出模块;所述以太网通信模块与所述软件仿真控制系统连接,所述数字输入输出模块与所述岸基远程控制系统连接;
技术总结
本发明公开了一种驾驶员在环的船舶远程驾驶半实物仿真测试平台,包括:岸基远程控制系统用于发布控制指令并接收状态反馈;信号控制系统,与岸基远程控制系统连接,用于为船舶控制网络提供运行环境和信号激励;数字化数据采集交互系统,实现数字信号与输入/输出信号的相互转换,其中,岸基远程控制系统包括一个驾驶员在环的船舶远程驾驶控制台和两个相同的可编程船舶控制柜;驾驶员在环的船舶远程驾驶控制台包括中央控制单元、人机交互显示屏和驾控台输入输出单元;可编程船舶控制柜,用于操控船舶航行。本发明构建了驾驶员在环的船舶远程驾驶仿真测试平台,为船舶远程控制仿真提供仿真测试条件,可广泛应用于船舶驾驶仿真测试领域。
技术研发人员:刘佳仑,林楠,严新平,李晨,李诗杰
受保护的技术使用者:武汉理工大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!