一种微小型尾座式无人机多模态统一控制方法
本发明属于无人飞行器控制,具体涉及一种微小型尾座式无人机的多模态统一控制方法。
背景技术:
1、微小型尾座式无人机(翼展不大于20cm)作为一种垂直起降无人机,既可以定点悬停进行监视追踪,也可以快速平飞实现大范围巡查;作为一种微小型无人机,有着很强的便携性、隐蔽性以及穿越性能,可以快速部署形成智能集群。其结构简单、成本低且适用于各种复杂任务场景,在军事和民事领域展现出巨大的应用价值。
2、然而,微小型尾座式无人机存在低雷诺数、大迎角等非线性气动问题,同时其系统灵敏度高、飞行包线大,难以实现多模态统一控制,其飞行控制技术一直是航空领域研究的重点和难点。目前,已有的控制方法均采用双模态独立控制方案,即通过两套基于经典理论的传统控制方法,如pid控制算法,分别控制悬停和平飞两个模态。该方案结构简单,易于实现,不依赖于系统数学模型,在尾座式无人机飞行控制领域被广泛使用。具体的,现有的控制方法的微小型尾座式无人机控制方案存在的不足主要体现在以下几个方面:(1)通过模态转换开关实现模态之间的转换,模态转换过程中无人机姿态无法精准控制;(2)采用双模态独立控制方案时,尾座式无人机的俯仰角会根据当前飞行模态被限制在较小的范围内,无法充分发挥微小尾座式无人机高机动性的优势;(3)将尾座式无人机完整飞行包线分为悬停模态、平飞模态以及过渡模态,模态转换过程繁琐且会出现难以控制的大幅度高度波动。无法实现多模态统一控制,不利于微小型尾座式无人机在复杂环境中执行任务。
技术实现思路
1、为克服现有技术不足,本发明旨在提出一种应用于微小型尾座式无人机的多模态统一控制方法。具体而言,考虑微小型尾座式无人机,对于在复杂场景下完成多种不同任务的迫切需求,在综合考虑微小型尾座式无人机飞行包线大、非线性强的情形下,提出一种多模态统一控制的微小型尾座式无人机控制方案。突破现有开源飞控中多模态独立控制方案的局限性,解决其模态转换过程繁琐且模态转换过程中姿态无法精确控制的问题,达到微小型尾座式无人机多模态统一控制、在大飞行包线内稳定飞行、实现悬停与平飞连续过渡转换且减小转换过程中高度波动的目的。
2、本发明采用的技术方案是,针对微小型尾座式无人机引入舵效先验知识、控制参数实时调整姿态控制方法以及一种弱模型依赖的位置控制方法,具体技术方案如下:
3、一种微小型尾座式无人机的多模态统一控制方法,包括以下步骤:
4、第一步,建立微小型尾座式无人机气动模型,得到纵向气动力与迎角、速度的对应关系以及舵效数据;
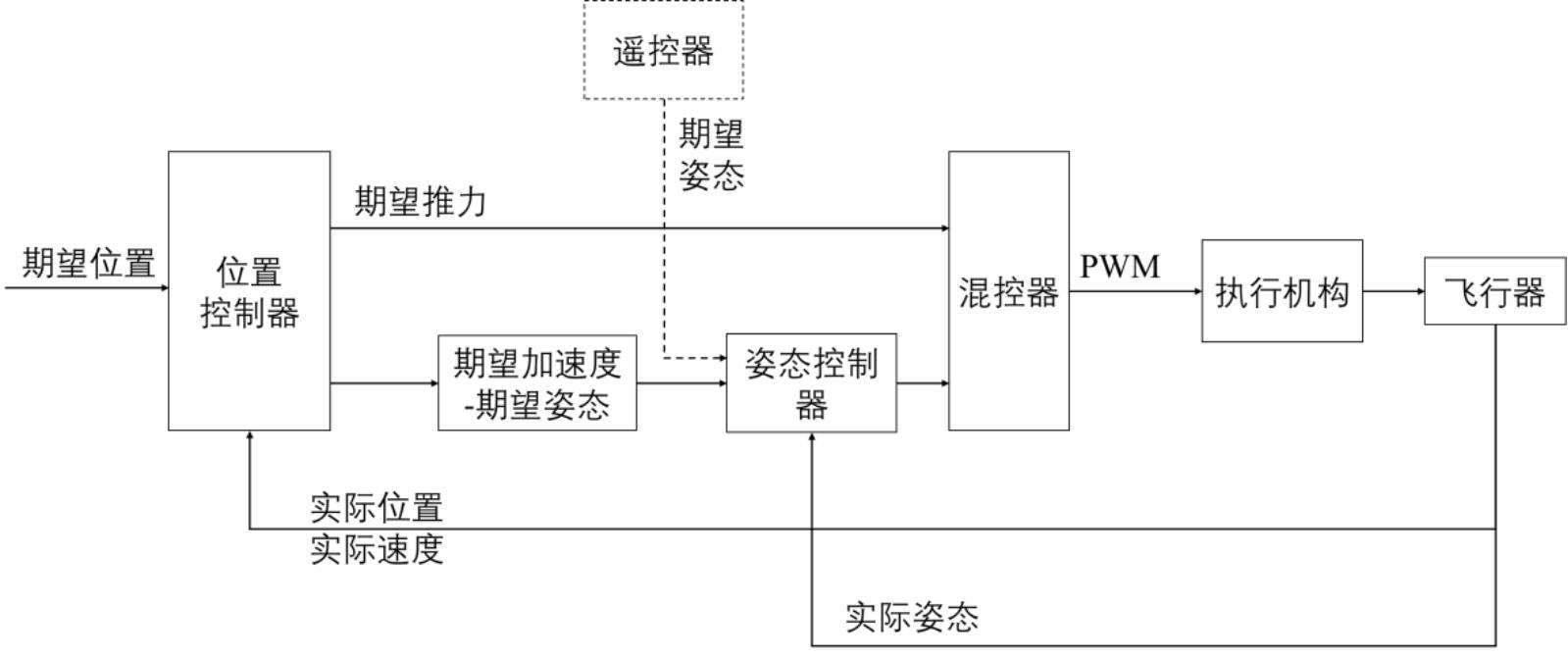
5、第二步,设计位置控制器,采用包含位置环和速度环的串级比例控制器,根据位置误差结合实时调整的微小型尾座式无人机气动模型,在不同模态下实时解算输出期望姿态和期望螺旋桨拉力;
6、第三步,基于误差四元数设计姿态控制器,包括外环角度控制器和内环角速度控制器,由姿态误差得到期望角加速度;
7、第四步,设计自适应混控器,引入舵效数据作为先验知识,根据动压的变化自适应调整混控器控制参数,将期望角速度和期望螺旋桨拉力映射为无人机电机和舵面的控制指令,实现不同模态下无人机姿态及位置的控制。
8、进一步,所述微小型尾座式无人机的翼展不大于20 cm。
9、进一步,所述多模态包括悬停模态、平飞模态以及过渡模态。
10、进一步,所述第一步,纵向气动力与迎角、速度的对应关系为
11、
12、
13、式中,,分别表示理想情况下根据气动模型得到的机身所受机体轴系下轴方向和轴方向的气动力; α为迎角; v为来流速度; l1 ,l2 ,d1 ,d2为常数;
14、舵效数据包括舵面同向偏转和舵面差动偏转时单位偏转角在单位来流速度下所产生的气动力矩变化量、:
15、
16、
17、式中,为左右舵面同向偏转的角度,为舵面同向偏转带来的俯仰力矩变化量,为左右舵面差动偏转的角度,为舵面差动偏转带来的绕机体轴系下轴的力矩变化量, v表示无人机飞行速度。
18、进一步,所述第二步具体为:
19、根据机型和实际状态实时调整微小型尾座式无人机气动模型,即:
20、
21、
22、式中,为机身所受机体轴系下轴方向的气动力;为机身所受机体轴系下轴方向的气动力;,表示机体坐标系下的轴和轴加速度误差; mx, mz为固定系数,根据具体机型进行确定;
23、将所述根据机型和实际状态实时调整微小型尾座式无人机气动模型代入非线性方程组:
24、
25、
26、式中, m为无人机质量,为地面坐标系下竖直方向的无人机加速度,为地面坐标系下水平方向的无人机加速度, t为螺旋桨拉力,为俯仰角;
27、将当前迎角和螺旋桨拉力作为初始值,求解非线性方程组,得到期望迎角和期望螺旋桨拉力;结合机载风速传感器得到期望俯仰角,通过l1横航向控制方法得到期望偏航角和滚转角。
28、进一步,所述第三步具体为:
29、由机载传感器获取表示无人机姿态的实际四元数,根据遥控器输入信号得到期望四元数,从而得到误差四元数:
30、
31、其中,表示实际四元数,为期望四元数,表示误差四元数;
32、根据下式求解旋转角度:
33、
34、式中,为机体轴系下的旋转轴矢量,为期望机体轴系绕机体轴系的旋转轴的旋转角度;
35、将旋转角度作为误差角度,外环角度控制器将误差角度乘上增益系数得到期望角速度;将期望角速度作为内环角速度控制器的内环期望,解算输出期望角加速度:
36、
37、式中,为期望角加速度, p为比例环节控制参数, i为积分环节控制参数, d为微分环节控制参数,为角速度误差,,其中为实际角速度,为期望角速度, t为时间。
38、进一步,所述第四步,将期望角加速度映射为期望舵面偏转角:
39、
40、式中,,分别为绕机体轴系下轴,轴的期望角加速度, v表示无人机飞行速度,为期望舵面偏转角;常数 b和 c表示在悬停状态下期望角加速度与舵面偏转角的映射关系:
41、
42、
43、 kx, ky分别表示控制参数随动压的变化系数:
44、
45、
46、其中,为微小型尾座式无人机悬停时的螺旋桨滑流速度;为微小型尾座式无人机平飞速度; jx、 jy分别表示无人机绕机体轴系下轴和轴的转动惯量。
47、本发明与现有技术相比所具有的有益效果:
48、对于微小型尾座式无人机该姿态控制方法可以实现多模态统一控制,悬停模态和平飞模态可以连续转换,基于误差四元数的姿态控制器应用于姿态角变化范围极大的微小型尾座式无人机,解决了用欧拉角表征姿态时奇异性的问题,充分发挥出尾座式无人机的高机动性优势。
49、本发明的控制方法结合舵效数据使控制参数自适应调整,解决单一控制器难以适应微小型尾座式无人机不同飞行状态的问题,实现大飞行包线内的稳定飞行,通过对比试验可以看出控制效果显著优于固定参数控制器。本发明提出的位置控制器采用的算法可以实现由期望加速度解算期望姿态以及期望拉力,并且有效降低了控制器对模型的依赖,从而显著减小模态转换过程中的高度波动。
- 还没有人留言评论。精彩留言会获得点赞!