一种全向多轴重载AGV调度系统的制作方法
本发明涉及无人搬运车,具体为一种全向多轴重载agv调度系统。
背景技术:
1、agv(automatedguidedvehicles)又名无人搬运车,自动导航车,激光导航车。其显著特点的是无人驾驶,agv上装备有自动导向系统,可以保障系统在不需要人工引航的情况下就能够沿预定的路线自动行驶,将货物或物料自动从起始点运送到目的地。agv的另一个特点是柔性好,自动化程度高和智能化水平高,agv的行驶路径可以根据仓储货位要求、生产工艺流程等改变而灵活改变,并且运行路径改变的费用与传统的输送带和刚性的传送线相比非常低廉。
2、中国专利202210108998.1涉及机器人agv技术领域,具体为一种全向多轴重载agv调度系统,包括:全向多轴重载agv调度子系统,连接有无线通信中继数据收发模块;全向多轴重载agv控制器,设置在全向多轴重载agv上,与全向多轴重载agv中的重载agv控制系统连接,通过车载无线通信模块与无线通信中继数据收发模块进行通信;全向多轴重载agv调度系统软件处理核心,设置在全向多轴重载agv调度子系统上。相对于传统作业方式,本发明的整套系统的工作效率高、实时性好、可靠性高,极大的降低了工作人员的劳动强度和劳动力成本,降低了人工劳动强度和人工安全风险,提高了工作效率和准确性。但上述调度系统还存在着一些问题,其采用了一个系统对一个无人搬运车进行控制,而通常一个控制系统只能对一台无人搬运车进行控制,比较麻烦,当对同一台无人搬运车进行调试后,需要更换另一个无人搬运车的控制系统,对其进行调试,比较麻烦,故而提出了一种全向多轴重载agv调度系统来解决以上问题。
技术实现思路
1、针对现有技术的不足,本发明提供了一种全向多轴重载agv调度系统,可以通过重载agv调度中心与多接口控制器,从而对多个无线控制模块发出指令,使其可以通过一个调度系统控制多台agv无人搬运车进行运行,且也可以通过中心控制模块,在agv无人搬运车失灵或者运行不对时,对其进行人工控制。
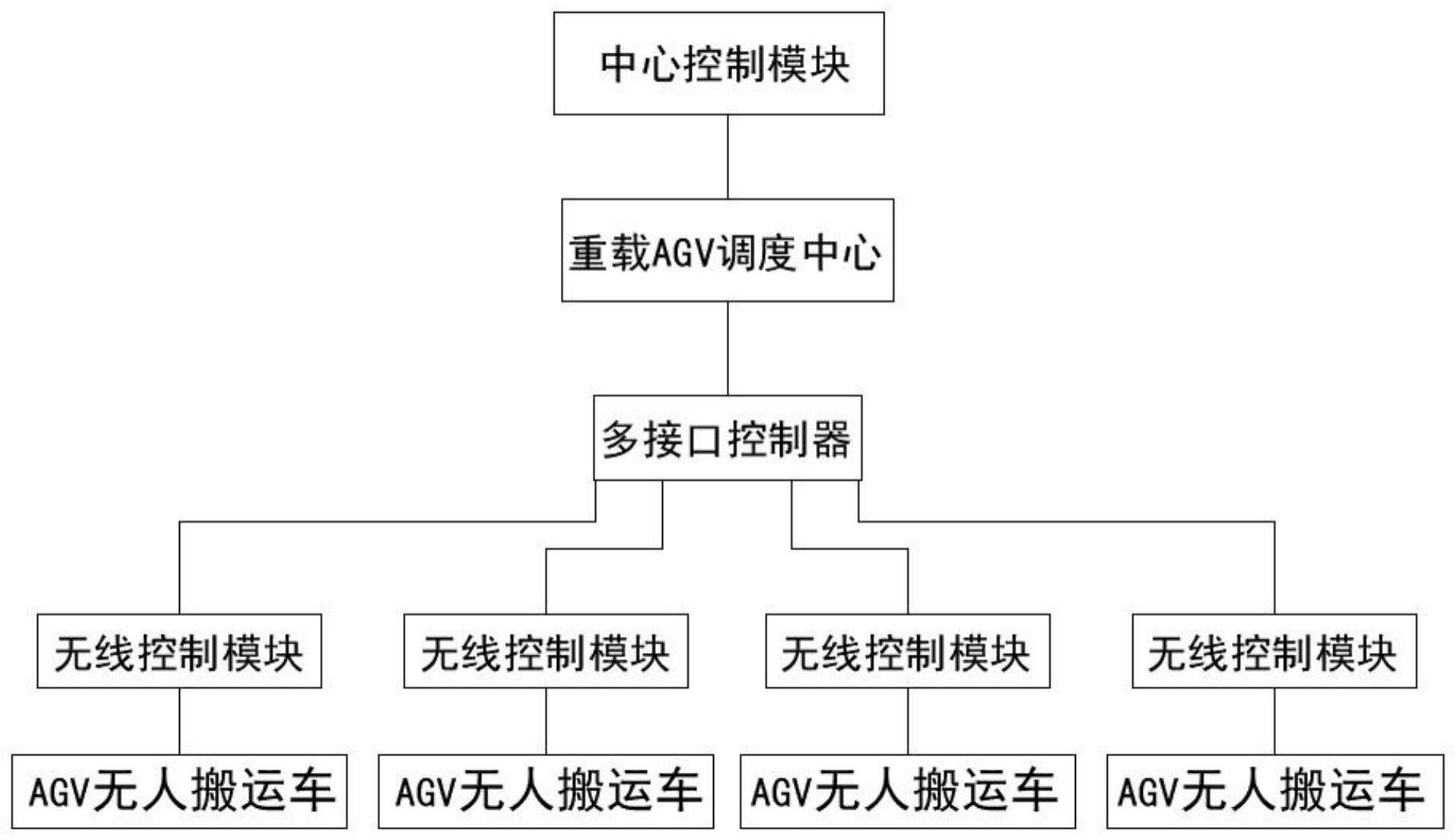
2、为实现上述目的,本发明提供如下技术方案:一种全向多轴重载agv调度系统,包括中心控制模块、重载agv调度中心、多接口控制器、无线控制模块以及agv无人搬运车,所述中心控制模块与所述重载agv调度中心通过电子元件进行连接,所述重载agv调度中心通过电子元件与所述多接口控制器相连接,所述多接口控制器通过所述无线控制模块与所述agv无人搬运车相连接。
3、进一步,所述中心控制模块、所述重载agv调度中心、所述多接口控制器以及所述无线控制模块之间都是通过电子元件进行连接,而所述无线控制模块与所述agv无人搬运车通过互联网进行连接。
4、进一步,所述中心控制模块包括人工控制器、自动控制器以及切换模块,所述人工控制器与自动控制器分别独立与切换模块进行连接,所述切换模块与所述重载agv调度中心进行连接。
5、进一步,所述多接口控制器可以与多个无线控制模块进行连接,且所述多接口控制器与每个所述无线控制模块连接端都设置有处理单元。
6、进一步,所述agv无人搬运车包括重载agv调度模块、驱动模块、其他模块、转向模块以及移动模块,所述重载agv调度模块通过电子元件分别与所述其他模块和所述驱动模块相连接,所述驱动模块分别与转向模块与移动模块进行连接。
7、进一步,所述转向模块包括左前转向驱动器、右前转向驱动器以及转向轮,所述左前转向驱动器与所述右前转向驱动器通过一个连接端与所述驱动模块进行连接,所述左前转向驱动器与所述右前转向驱动器可以分别带动其用于转向的电机带动所述转向轮进行旋转。
8、进一步,所述移动模块包括输出驱动器、驱动电机以及驱动轮,所述驱动轮主要指的是所述agv无人搬运车的后轮,所述输出驱动器与所述驱动模块通过电子元件进行连接,所述输出驱动器通过所述驱动电机带动所述驱动轮进行旋转,从而带动agv无人搬运车进行移动。
9、进一步,所述其他模块主要包括货物识别模块、摄像模块、雷达模块、二维码传感器模块、陀螺仪传感器模块、无线通信模块、货物取放模块以及无线遥控模块等,这些模块互相配合构成agv无人搬运车的一些基本功能。
10、本申请还提供另一种全向多轴重载agv调度系统的调度方法,包括以下步骤:
11、1)在对调度算法及路径规划研究前,需要对应用环境建立空间模型。
12、2)将路径描述表示(x,y)该点在地图中的空间位置坐标,并且在空间位置坐标中标明工位机台、路径交叉点、充电位置和停车等待区,对空间位置坐标进行抽象化,得到简化后的拓扑地图,用于agv在此等待控制系统的调度,直线的权值代表路径的长度,从而对每个agv无人搬运车进行预设置。
13、3)在接收到中心控制模块的运输任务时,从路径库中查找运输任务对应的最优路径;判断agv运行过程中是否有冲突并根据冲突的类型进行调节避免agv之间的冲突。
14、其中,在整个路线规划完成之后,由于agv在行驶过程中随时可能遇到突发情况,如遇行人停车,此时就会给规划的时间点造成误差。
15、4)为了避兔节点处冲突的发生,采用交通规则法作为动态处理规则,即采用等待策略,在两个agv同时经过节点时,高优先级agv优先通行,同优先级小车均为直行或均为转弯时,最接近节点位置小车优先通行,1个agv直行1个agv转弯时,则直行agv优先通行。
16、与现有技术相比,本申请的技术方案具备以下有益效果:
17、该全向多轴重载agv调度系统,在进行使用时,可以通过重载agv调度中心与多接口控制器,从而对多个无线控制模块发出指令,使其可以通过一个调度系统控制多台agv无人搬运车进行运行,且也可以通过中心控制模块,在agv无人搬运车失灵或者运行不对时,对其进行人工控制。
技术特征:
1.一种全向多轴重载agv调度系统,包括中心控制模块、重载agv调度中心、多接口控制器、无线控制模块以及agv无人搬运车,其特征在于:所述中心控制模块与所述重载agv调度中心通过电子元件进行连接,所述重载agv调度中心通过电子元件与所述多接口控制器相连接,所述多接口控制器通过所述无线控制模块与所述agv无人搬运车相连接。
2.根据权利要求1所述的一种全向多轴重载agv调度系统,其特征在于:所述中心控制模块、所述重载agv调度中心、所述多接口控制器以及所述无线控制模块之间都是通过电子元件进行连接,而所述无线控制模块与所述agv无人搬运车通过互联网进行连接。
3.根据权利要求1所述的一种全向多轴重载agv调度系统,其特征在于:所述中心控制模块包括人工控制器、自动控制器以及切换模块,所述人工控制器与自动控制器分别独立与切换模块进行连接,所述切换模块与所述重载agv调度中心进行连接。
4.根据权利要求1所述的一种全向多轴重载agv调度系统,其特征在于:所述多接口控制器可以与多个无线控制模块进行连接,且所述多接口控制器与每个所述无线控制模块连接端都设置有处理单元。
5.根据权利要求1所述的一种全向多轴重载agv调度系统,其特征在于:所述agv无人搬运车包括重载agv调度模块、驱动模块、其他模块、转向模块以及移动模块,所述重载agv调度模块通过电子元件分别与所述其他模块和所述驱动模块相连接,所述驱动模块分别与转向模块与移动模块进行连接。
6.根据权利要求5所述的一种全向多轴重载agv调度系统,其特征在于:所述转向模块包括左前转向驱动器、右前转向驱动器以及转向轮,所述左前转向驱动器与所述右前转向驱动器通过一个连接端与所述驱动模块进行连接,所述左前转向驱动器与所述右前转向驱动器可以分别带动其用于转向的电机带动所述转向轮进行旋转。
7.根据权利要求5所述的一种全向多轴重载agv调度系统,其特征在于:所述移动模块包括输出驱动器、驱动电机以及驱动轮,所述驱动轮主要指的是所述agv无人搬运车的后轮,所述输出驱动器与所述驱动模块通过电子元件进行连接,所述输出驱动器通过所述驱动电机带动所述驱动轮进行旋转,从而带动agv无人搬运车进行移动。
8.根据权利要求5所述的一种全向多轴重载agv调度系统,其特征在于:所述其他模块主要包括货物识别模块、摄像模块、雷达模块、二维码传感器模块、陀螺仪传感器模块、无线通信模块、货物取放模块以及无线遥控模块等,这些模块互相配合构成agv无人搬运车的一些基本功能。
9.一种全向多轴重载agv调度系统的调度方法,其特征在于,包括以下步骤:
技术总结
本发明公开了一种全向多轴重载AGV调度系统,包括中心控制模块、重载AGV调度中心、多接口控制器、无线控制模块以及AGV无人搬运车,所述中心控制模块与所述重载AGV调度中心通过电子元件进行连接,所述重载AGV调度中心通过电子元件与所述多接口控制器相连接,所述多接口控制器通过所述无线控制模块与所述AGV无人搬运车相连接。该全向多轴重载AGV调度系统,通过一个调度系统控制多台AGV无人搬运车进行运行,且也可以通过中心控制模块,在AGV无人搬运车失灵或者运行不对时,对其进行人工控制。
技术研发人员:黄骅,江俊,陈醉,张文斌
受保护的技术使用者:浙江智澜科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!