一种远程遥控无人舰艇航向容错控制系统及方法与流程
本发明涉及二维的控制或者航道控制领域,具体涉及一种远程遥控无人舰艇航向容错控制系统。
背景技术:
1、无人舰艇是一种无人操作的舰艇,主要有无人水面舰艇和无人潜航器两种,主要用于执行危险以及不适于有人船只执行的任务,无人舰艇有望在未来10年内彻底变革海军的军事行动和战争,无人舰艇通常通过无线指挥系统对其进行控制,由于在航行过程中存在海浪的干扰,需要对无人舰艇进行调整,如何在调整过程中降低调整频次,同时保证在容错范围内航行时控制系统需要解决的问题。
2、背景技术的前述论述仅意图便于理解本发明。此论述并不认可或承认提及的材料中的任一种公共常识的一部分。
3、现在已经开发出了很多控制系统,经过我们大量的检索与参考,发现现有的控制系统有如公开号为cn112925324b所公开的系统,这些系统一般包括远程控制单元,用于发出远程控制信号,所述远程控制单元包括遥控器、网络移动终端,所述遥控器包括预定巡航路线选择开关;信息处理单元,所述信息处理单元与遥控器、网络移动终端信号连通,用于接收所述遥控器、网络移动终端发出的远程控制信号并进行处理并生成执行控制信号;执行单元,用于接收所述信息处理单元发出的执行控制信号或遥控器所发出的远程控制信号,并根据所述接收的控制信号控制舰艇的移动。但该系统并未考虑到航行过程中海浪对原有航线的影响,仅仅是对无人舰艇作出基础的控制,控制频率较高,容易被捕捉信号。
技术实现思路
1、本发明的目的在于,针对所存在的不足,提出了一种远程遥控无人舰艇航向容错控制系统及方法。
2、本发明采用如下技术方案:
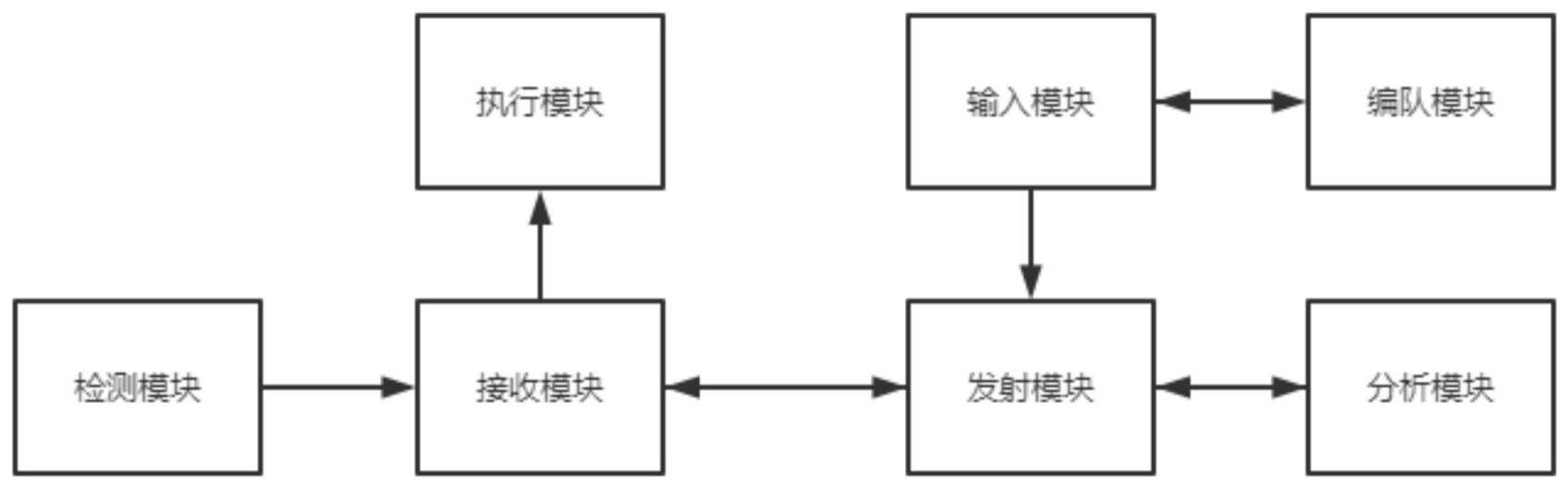
3、一种远程遥控无人舰艇航向容错控制系统,包括执行模块、接收模块、检测模块、发射模块、分析模块、输入模块和编队模块;
4、所述执行模块、所述接收模块和所述检测模块安装于无人舰艇,所述接收模块用于接收指令信息,所述执行模块根据指令信息对无人舰艇的转向进行控制,所述检测模块用于检测无人舰艇的航行状态信息;
5、所述发射模块、所述分析模块、所述输入模块和所述编队模块安装于指挥控制中心,所述发射模块用于发射指令信息,所述输入模块用于输入目标信息,所述分析模块基于所述目标信息和无人舰艇的航行状态计算得到指令参数,所述编队模块用于记录无人舰艇的通讯身份信息;
6、所述分析模块设置容错区域,根据无人舰艇的实时航行状态数据计算出横移率和偏角率,所述分析模块基于横移率、偏角率计算出无人舰艇的容错指数,当容错指数小于阈值时,所述分析模块再计算出转向角,所述执行模块基于所述转向角对无人舰艇进行航向调整;
7、进一步的,所述检测模块检测的航行状态信息包括无人舰艇的坐标、无人舰艇的实时航向角度、无人舰艇的航速;
8、进一步的,所述分析模块包括数据存储单元和计算处理单元,所述存储单元用于保存接收的检测信息,所述计算处理单元用于执行计算任务;
9、进一步的,所述容错指数pw的计算公式为:
10、
11、其中,tnow表示当前时刻,l表示无人舰艇与目标地点之间的距离,v为无人舰艇的航速,dft为容错距离,d(tnow)为当前时刻无人舰艇与容错区域航道轴线的距离,θ(tnow)为当前时刻无人舰艇航向与容错区域航道轴线的夹角,α为横移率,β为偏角率;
12、进一步的,所述横移率α的计算公式为:
13、
14、所述偏角率β的计算公式为:
15、
16、其中,[t1,t2]为横移率和偏角率对应的时间段,θ(t)表示无人舰艇与航道轴线夹角与时间的函数关系;
17、一种远程遥控无人舰艇航向容错控制方法,包括如下步骤:
18、s101、无人舰艇实时上传航行数据;
19、s102、根据航行数据计算出横移率和偏角率;
20、s103、计算出容错指数;
21、s104、根据容错指数判断是否需要调整航向,若是,则计算出调转向角,若否,则跳回步骤s102;
22、s105、根据转向角调整航向,清空航行数据后跳回步骤s102。
23、本发明所取得的有益效果是:
24、本系统根据起始地点和目标地点设置了一个容错区域,基于容错区域对航行过程中无人舰艇所在的位置进行容错判断,当容错指数小于阈值时再进行航向调整,大大降低了调整频次,同时,本系统还针对每个时段计算出横移率和偏角率,基于这两个参数计算容错指数,使容错指数能更好地反映出在海浪影响下的偏差,降低了后续需要调整的次数。
25、为使能更进一步了解本发明的特征及技术内容,请参阅以下有关本发明的详细说明与附图,然而所提供的附图仅用于提供参考与说明,并非用来对本发明加以限制。
技术特征:
1.一种远程遥控无人舰艇航向容错控制系统,其特征在于,包括执行模块、接收模块、检测模块、发射模块、分析模块、输入模块和编队模块;
2.如权利要求1所述的一种远程遥控无人舰艇航向容错控制系统,其特征在于,所述检测模块检测的航行状态信息包括无人舰艇的坐标、无人舰艇的实时航向角度、无人舰艇的航速。
3.如权利要求2所述的一种远程遥控无人舰艇航向容错控制系统,其特征在于,所述分析模块包括数据存储单元和计算处理单元,所述存储单元用于保存接收的检测信息,所述计算处理单元用于执行计算任务。
4.如权利要求3所述的一种远程遥控无人舰艇航向容错控制系统,其特征在于,所述容错指数pw的计算公式为:
5.如权利要求4所述的一种远程遥控无人舰艇航向容错控制系统,其特征在于,所述横移率α的计算公式为:
6.一种远程遥控无人舰艇航向容错控制方法,其特征在于,包括如下步骤:
技术总结
本发明提供了一种远程遥控无人舰艇航向容错控制系统,包括执行模块、接收模块、检测模块、发射模块、分析模块、输入模块和编队模块,所述接收模块用于接收指令信息,所述执行模块根据指令信息对无人舰艇的转向进行控制,所述检测模块用于检测无人舰艇的航行状态信息,所述发射模块用于发射指令信息,所述输入模块用于输入目标信息,所述分析模块基于所述目标信息和无人舰艇的航行状态计算得到指令参数,所述编队模块用于记录无人舰艇的通讯身份信息;本系统的分析模块能够对无人机的航行数据进行分析,在其容易脱离容错区域时对航向进行调整,降低了调整的频次,使航行更加顺畅。
技术研发人员:袁思鸣,杜度,毛柳伟,陈科,杨坤,韩胡莎
受保护的技术使用者:中国人民解放军92578部队
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!