巡检机器人的行进控制方法、装置、电子设备及存储介质与流程
本公开涉及通信,尤其涉及一种巡检机器人的行进控制方法、装置、电子设备及存储介质。
背景技术:
1、当前,巡检机器人主要用于对具有一定规模的数据机房进行巡检处理,实现数据机房管理,机器人巡检主要围绕环境参数监控、视频监控、声音监控等维度展开,并与巡检机器人对应的监控数据平台进行通信。
2、相关技术中,巡检机器人通过配备wifi通信模块或者配备移动通信网络来实现移动数据通信,采用视频识别和雷达导航技术进行室内导航。
3、这种方式下,由于机房建设的特点,很多机房内屏蔽电磁信号,机房环境多数存在移动通信网络无覆盖的情况,用4g或5g信号无法满足巡检设备的正常通信,在机房内建设wifi信号覆盖,那么就会增加机房内的电磁环境复杂度,对于高规格的数据机房是存在安全隐患的,使得巡检机器人的通信受到限制。
技术实现思路
1、本公开旨在至少在一定程度上解决相关技术中的技术问题之一。
2、为此,本公开的目的在于提出一种巡检机器人的行进控制方法、装置、电子设备以及存储介质。
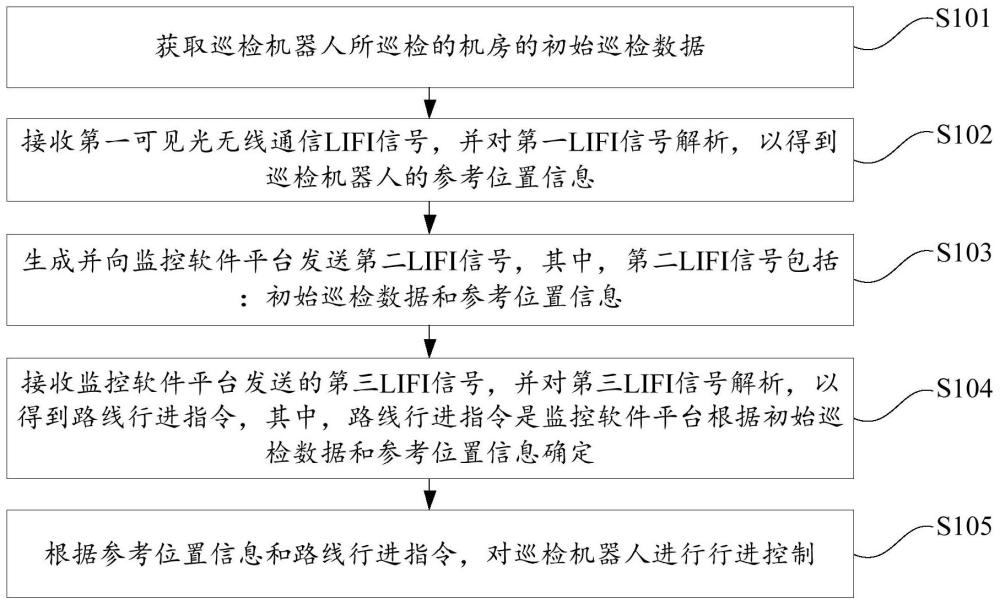
3、本公开第一方面实施例提出一种巡检机器人的行进控制方法,应用于巡检机器人,包括:获取巡检机器人所巡检的机房的初始巡检数据;接收第一可见光无线通信lifi信号,并对第一lifi信号解析,以得到巡检机器人的参考位置信息;生成并向监控软件平台发送第二lifi信号,其中,第二lifi信号包括:初始巡检数据和参考位置信息;接收监控软件平台发送的第三lifi信号,并对第三lifi信号解析,以得到路线行进指令,其中,路线行进指令是监控软件平台根据初始巡检数据和参考位置信息确定;根据参考位置信息和路线行进指令,对巡检机器人进行行进控制。
4、本公开第二方面实施例提出一种巡检机器人的行进控制方法,应用于监控软件平台,包括:接收并解析巡检机器人发送的第二lifi信号,其中,第二lifi信号包括:初始巡检数据和参考位置信息;根据初始巡检数据和参考位置信息,生成并向巡检机器人发送第三lifi信号,其中,第三lifi信号包括:巡检机器人的路线行进指令。
5、本公开第三方面实施例提出一种巡检机器人的行进控制装置,应用于巡检机器人,包括:获取模块,用于获取巡检机器人所巡检的机房的初始巡检数据;第一接收模块,用于接收第一可见光无线通信lifi信号,并对第一lifi信号解析,以得到巡检机器人的参考位置信息;第一生成模块,用于生成并向监控软件平台发送第二lifi信号,其中,第二lifi信号包括:初始巡检数据和参考位置信息;第二接收模块,用于接收监控软件平台发送的第三lifi信号,并对第三lifi信号解析,以得到路线行进指令,其中,路线行进指令是监控软件平台根据初始巡检数据和参考位置信息确定;控制模块,用于根据参考位置信息和路线行进指令,对巡检机器人进行行进控制。
6、本公开第四方面实施例提出一种巡检机器人的行进控制装置,应用于监控软件平台,包括:第三接收模块,用于接收并解析巡检机器人发送的第二lifi信号,其中,第二lifi信号包括:初始巡检数据和参考位置信息;第二生成模块,用于根据初始巡检数据和参考位置信息,生成并向巡检机器人发送第三lifi信号,其中,第三lifi信号包括:巡检机器人的路线行进指令。
7、本公开第五方面实施例提出了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,处理器执行程序时,实现如本公开第一方面实施例提出的巡检机器人的行进控制方法。
8、本公开第六方面实施例提出了一种非临时性计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如本公开第一方面实施例提出的巡检机器人的行进控制方法。
9、本公开第七方面实施例提出了一种计算机程序产品,当计算机程序产品中的指令由处理器执行时,执行如本公开第一方面实施例提出的巡检机器人的行进控制方法。
10、本公开实施例中提出的巡检机器人的行进控制方法、装置、电子设备、存储介质,至少包括以下有益效果:通过获取巡检机器人所巡检的机房的初始巡检数据,接收第一可见光无线通信lifi信号,并对第一lifi信号解析,以得到巡检机器人的参考位置信息,生成并向监控软件平台发送第二lifi信号,其中,第二lifi信号包括:初始巡检数据和参考位置信息,接收监控软件平台发送的第三lifi信号,并对第三lifi信号解析,以得到路线行进指令,其中,路线行进指令是监控软件平台根据初始巡检数据和参考位置信息确定,根据参考位置信息和路线行进指令,对巡检机器人进行行进控制,能够基于lifi技术实现巡检机器人的数据通信以及室内定位导航,避免机房公网通信无覆盖和内场电磁干扰对巡检机器人通信的影响,实现巡检机器人与监控软件平台高效可靠的数据通信。
11、本公开附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本公开的实践了解到。
技术特征:
1.一种巡检机器人的行进控制方法,其特征在于,应用于巡检机器人,包括:
2.如权利要求1所述的方法,其特征在于,所述根据所述参考位置信息和所述路线行进指令,对所述巡检机器人进行行进控制,包括:
3.如权利要求2所述的方法,其特征在于,所述根据所述坐标位置信息、所述环境图像以及所述路线行进指令,对所述巡检机器人进行行进控制,包括:
4.如权利要求1所述的方法,其特征在于,所述接收第一可见光无线通信lifi信号,包括:
5.如权利要求4所述的方法,其特征在于,所述生成并向监控软件平台发送第二lifi信号,包括:
6.一种巡检机器人的行进控制方法,其特征在于,应用于监控软件平台,包括:
7.如权利要求6所述的方法,其特征在于,所述根据所述初始巡检数据和所述参考位置信息,生成并向所述巡检机器人发送第三lifi信号,包括:
8.如权利要求7所述的方法,其特征在于,所述根据所述初始巡检数据、所述参考位置信息以及所述预置机房通行路线图,生成所述巡检机器人的路线行进指令,包括:
9.如权利要求7所述的方法,其特征在于,所述向所述巡检机器人发送所述第三lifi信号,包括:
10.一种巡检机器人的行进控制装置,其特征在于,应用于巡检机器人,包括:
11.如权利要求10所述的装置,其特征在于,所述控制模块,包括:
12.如权利要求11所述的装置,其特征在于,所述控制子模块,具体用于:
13.如权利要求10所述的装置,其特征在于,所述第一接收模块,具体用于:
14.如权利要求13所述的装置,其特征在于,所述第一生成模块,具体用于:
15.一种巡检机器人的行进控制装置,其特征在于,应用于监控软件平台,包括:
16.如权利要求15所述的装置,其特征在于,所述第二生成模块,包括:
17.如权利要求16所述的装置,其特征在于,所述第一生成子模块,具体用于:
18.如权利要求16所述的装置,其特征在于,所述第二生成子模块,具体用于:
19.一种电子设备,其特征在于,包括:
20.一种存储有计算机指令的非瞬时计算机可读存储介质,其特征在于,其中,所述计算机指令用于使所述计算机执行权利要求1-5中任一项所述的巡检机器人的行进控制方法,或者执行权利要求6-9中任一项所述的巡检机器人的行进控制方法。
技术总结
本公开提出一种巡检机器人的行进控制方法、装置、电子设备及存储介质,该方法包括:获取巡检机器人所巡检的机房的初始巡检数据,接收第一可见光无线通信LIFI信号,并对第一LIFI信号解析,以得到巡检机器人的参考位置信息,生成并向监控软件平台发送第二LIFI信号,其中,第二LIFI信号包括:初始巡检数据和参考位置信息,接收监控软件平台发送的第三LIFI信号,并对第三LIFI信号解析,以得到路线行进指令,根据参考位置信息和路线行进指令,对巡检机器人进行行进控制。通过本公开,能够基于LIFI技术实现巡检机器人的数据通信以及室内定位导航,避免机房公网通信无覆盖和内场电磁干扰对巡检机器人通信的影响,实现巡检机器人与监控软件平台高效可靠的数据通信。
技术研发人员:李杰昌,高坚,张杰,马杰,卫延伟,彭亚,马辉,康中伟
受保护的技术使用者:中国移动通信集团河南有限公司
技术研发日:
技术公布日:2024/10/21
- 还没有人留言评论。精彩留言会获得点赞!