一种爬壁机器人运动路径控制系统及控制方法
本发明涉及爬壁机器人控制,具体涉及一种爬壁机器人运动路径控制系统及控制方法。
背景技术:
1、近年来,随着科学技术的发展,多个领域中机器人的发展迅速且需求量增加。众多机器人中,爬壁机器人是特殊的一类。在大型发电供热企业中,由于锅炉壁面长期受到侵蚀、磨损,所以需要定期检测壁面磨损程度以确保安全可靠。目前,锅炉壁面的磨损检测主要由人工完成检测,而且人工检测效率低,危险系数高。随着时代的进步和科技大发展,为了对人力资源和物力资源的节约,以及为了避免人工的安全隐患,不能停留下早期采用人工检测的阶段,因此爬壁机器人在此处可以代替人工。但是爬壁机器人的移动作业环境较为复杂,因此需要对爬行过程中的位姿偏差进行分析,面对这些问题,众多学者提出了许多不同的控制方法,控制方法的升级不仅保护了环境以及人力物力资源的节约,而且对爬壁机器人运行降低了成本以及大大提高了路径控制的效率能力。
2、在爬壁机器人路径控制系统中,控制左右两电机的速度误差是重要的影响因素之一。目前为了解决这一问题,来更好的对爬壁机器人路径进行控制,普遍采用滑模控制控制的方法来实现路径的控制。但是滑模控制的方法由于其特性导致其存在“抖振”的问题,而且这个问题因是其特性问题,无法避免,因此其控制效果欠佳。
3、此外,对爬壁机器人路径控制的方法还有传统pid控制算法以及在传统pid算法基础上进行改进得到的自适应模糊pid控制方法。但是由于爬壁机器人的路径中存在很多的障碍物和表面不平整等不确定性因素,这导致请控制过程是一个具有时变性、大滞后的复杂对象,难以建立精确的数学模型,传统pid算法难以满足其控制要求。因此,在此基础上提出一种结合模糊控制与pid控制,利用模糊控制的推理能力在线调整pid参数,控制效果良好,但是缺乏自学习能力,适应能力有限。
技术实现思路
1、本发明提供了一种爬壁机器人运动路径控制系统及控制方法,以解决现有技术中由于壁面不规则、摩擦力变化等外部干扰,影响路径控制的精准性和稳定性以及机器人工作过程中安全性的问题。
2、本发明提供了一种爬壁机器人运动路径控制系统,包括:外环控制回路、内环控制回路,
3、其中,外环控制回路包括:主被控对象、差速转换器、事件触发器;
4、内环控制回路包括:副被控对象、模糊控制器、pid控制器;
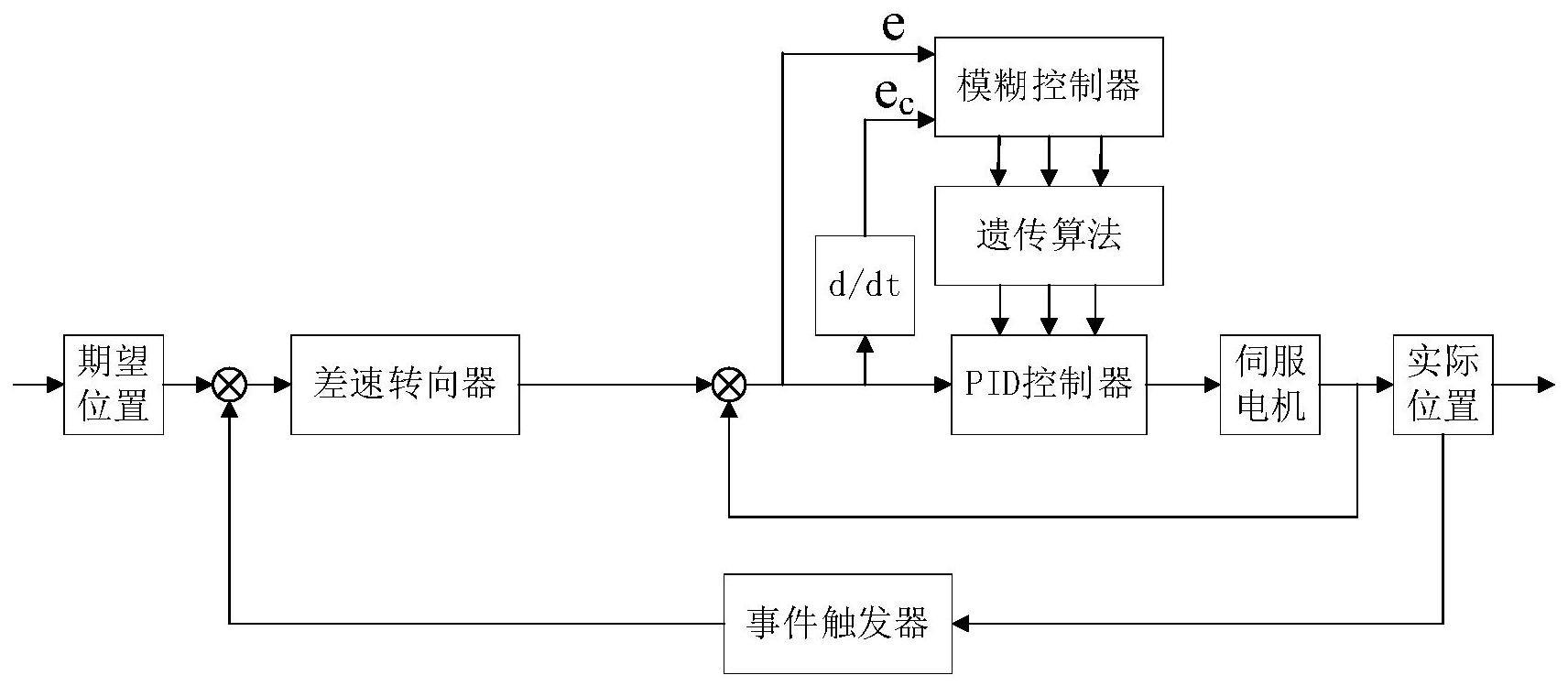
5、主被控对象的输出端与事件触发器的输入端连接,主被控对象输出实际位置;事件触发器的输出端、外部期望位置信号与差速转向器的输入端连接;差速转向器的输出端分别与模糊控制器的输入端、pid控制器的输入端连接;模糊控制器的输出端与pid控制器的输入端连接;pid控制器的输出端与副被控对象的输入端连接;副被控对象的输出端分别与模糊控制器的输入端、pid控制器的输入端、主被控对象连接,副被控对象输出实际转速。
6、进一步地,所述内环控制回路还包括:遗传算法模块;模糊控制器的输出端与遗传算法模块的输入端连接;遗传算法模块的输出端与pid控制器连接。
7、本发明还提供了一种爬壁机器人运动路径控制系统的控制方法,包括:外环控制过程、内环控制过程,
8、其中,外环控制过程包括如下步骤:
9、步骤a1:设置爬壁机器人期望位置;
10、步骤a2:获取主被控对象输出的实际位置信息;
11、步骤a3:事件触发器对实际位置信息进行过滤,输出符合触发条件的实际位置信息;
12、步骤a4:差速转换器根据期望位置以及实际位置获取偏转角度、速度偏差、速度偏差率。
13、进一步地,所述内环控制过程包括如下步骤:
14、步骤b1:模糊控制器根据速度偏差、速度偏差率、反馈的电机实际转速获取pid控制的三个量;
15、步骤b2:pid控制器根据模糊控制器输出的三个量对副被控对象进行控制。
16、进一步地,所述差速转向器获取速度偏差的公式如下:
17、v=vr-vl=d×tanθ
18、式中,v为速度偏差量;vr为右侧履带的速度;vl为左边履带的速度;d为左右两侧履带之间的宽度;θ为偏转角度,计算公式如下:
19、θ=arctan2(yc-ya,xc-xa)
20、其中,xc、yc分别为实际位置坐标;xa、ya分别为期望位置坐标。
21、进一步地,所述差速转向器获取速度偏差率的公式如下:
22、
23、式中,δv为速度偏差率;vr为右侧履带的速度;vl为左边履带的速度;d为左右两侧履带之间的宽度;θ为偏转角度。
24、进一步地,所述事件触发器的触发条件为:
25、
26、式中,ω1、ω2、ω3、ω4是正定对称矩阵,σ为属于(0,1)的常数,h为采样周期,j=1,2,…为整数,x1((k+j)h)是当前时刻的实际位置信号,x1(kh)是上一个时刻的实际位置信号,w(k)=0.2sin(k)为预设定的一个正弦扰动。
27、进一步地,所述步骤b1中还包括先通过遗传算法对模糊控制器输出的三个量进行优化,再传输给pid控制器。
28、本发明的有益效果:
29、本发明串级控制的主控制器采用差速转换器,副控制器采用基于遗传算法的模糊pid控制器,能够根据主被控对象输出的实际位置和事先设定的期望位置比较,得出所需的偏转角度以及两侧履带的速度偏差和速度偏差率,然后将这两个参数输入到模糊控制器中得到所需的pid三个参数,并将三个参数输入到遗传算法模块,对这三个参数进行优化得出最优解,最终实现最为理想的路径控制效果。
30、本发明对事件触发器进行改进,在触发条件中融入了扰动项,使得控制系统的抗干扰能力明显增强。此外,由于外环是对位置进行控制,对位置数据的变化极为敏感。但是由于触发条件中扰动项的存在,使得触发条件更加严格,能够有效过滤掉由于壁面不规则、摩擦力变化等因素引起的无用信号,大大降低了网络带宽的压力,保证了控制系统的流畅性。
技术特征:
1.一种爬壁机器人运动路径控制系统,包括:外环控制回路、内环控制回路,
2.如权利要求1所述的爬壁机器人运动路径控制系统,其特征在于,所述内环控制回路还包括:遗传算法模块;模糊控制器的输出端与遗传算法模块的输入端连接;遗传算法模块的输出端与pid控制器连接。
3.一种爬壁机器人运动路径控制系统的控制方法,适用于如权利要求1或2所述的爬壁机器人运动路径控制系统,其特征在于,包括:外环控制过程、内环控制过程,
4.如权利要求3所述的爬壁机器人运动路径控制系统的控制方法,其特征在于,所述内环控制过程包括如下步骤:
5.如权利要求3所述的爬壁机器人运动路径控制系统的控制方法,其特征在于,所述差速转向器获取速度偏差的公式如下:
6.如权利要求3所述的爬壁机器人运动路径控制系统的控制方法,其特征在于,所述差速转向器获取速度偏差率的公式如下:
7.如权利要求3所述的爬壁机器人运动路径控制系统的控制方法,其特征在于,所述事件触发器的触发条件为:
8.如权利要求4所述的爬壁机器人运动路径控制系统的控制方法,其特征在于,所述步骤b1中还包括先通过遗传算法对模糊控制器输出的三个量进行优化,再传输给pid控制器。
技术总结
本发明公开了一种爬壁机器人运动路径控制系统,外环控制回路包括:主被控对象、差速转换器、事件触发器;内环控制回路包括:副被控对象、模糊控制器、PID控制器;主被控对象的输出端与事件触发器的输入端连接;事件触发器的输出端、外部期望位置信号与差速转向器的输入端连接;差速转向器的输出端分别与模糊控制器的输入端、PID控制器的输入端连接;模糊控制器的输出端与PID控制器的输入端连接;PID控制器的输出端与副被控对象的输入端连接;副被控对象的输出端分别与模糊控制器的输入端、PID控制器的输入端、主被控对象连接。本发明通过速度偏差和速度偏差率获得PID控制的三个参数,并优化三个参数,提高了路径控制效果。
技术研发人员:杜昭平,张驰,杨晓飞,李长江,李建祯
受保护的技术使用者:江苏科技大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!