一种人机混驾环境下的多车协同决策方法
本发明涉及自动驾驶领域,尤其是涉及一种人机混驾环境下的多车协同决策方法。
背景技术:
1、随着自动驾驶汽车的快速发展,在未来很长一段时间里,人类驾驶汽车(human-driving vehicle,hv)与网联自动驾驶汽车(connected and automated vehicle,cav)将会以人机混驾交通流的形式共享道路资源。人机混驾场景下如何保证安全、提高效率是未来自动驾驶研究的重要议题。单车智能的自动驾驶在复杂交互环境中具有环境感知局限性,难以保证交互安全;往往表现出相对保守的交互行为,难以保证交互效率;在面对复杂场景时难以做出最佳决策,且存在设备成本较高等现实问题。随着cav渗透率的提高,可以考虑采用车车协同的方式解决复杂环境中的驾驶冲突,提升安全和效率。
2、但是,目前车车协同相关研究,多为纯cav环境下研究车辆协同或以单车智能的视角研究cav与hv的交互,缺乏混驾场景cav与hv交互以及cav之间协同的综合考虑。目前大多研究仅将hv当作动态障碍物或用跟驰模型进行简单表达,hv的动态交互特征未能有效捕捉,cav与hv的交互性未能很好体现。此外,现有研究未考量协同cav之间个体需求差异,所得模型难以满足cav个性化的驾乘需求。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供的一种人机混驾环境下的多车协同决策方法,是一种可实现cav车间协同以及cav与hv交互相耦合的协同决策方法。在具体的模型方法设计中,通过收益函数实现cav个性化驾乘偏好,并根据hv交互的不确定性采用孪生博弈的方式实现模型动态调整,然后进行模型求解,得出最优的车辆动作决策结果。
2、本发明的目的可以通过以下技术方案来实现:
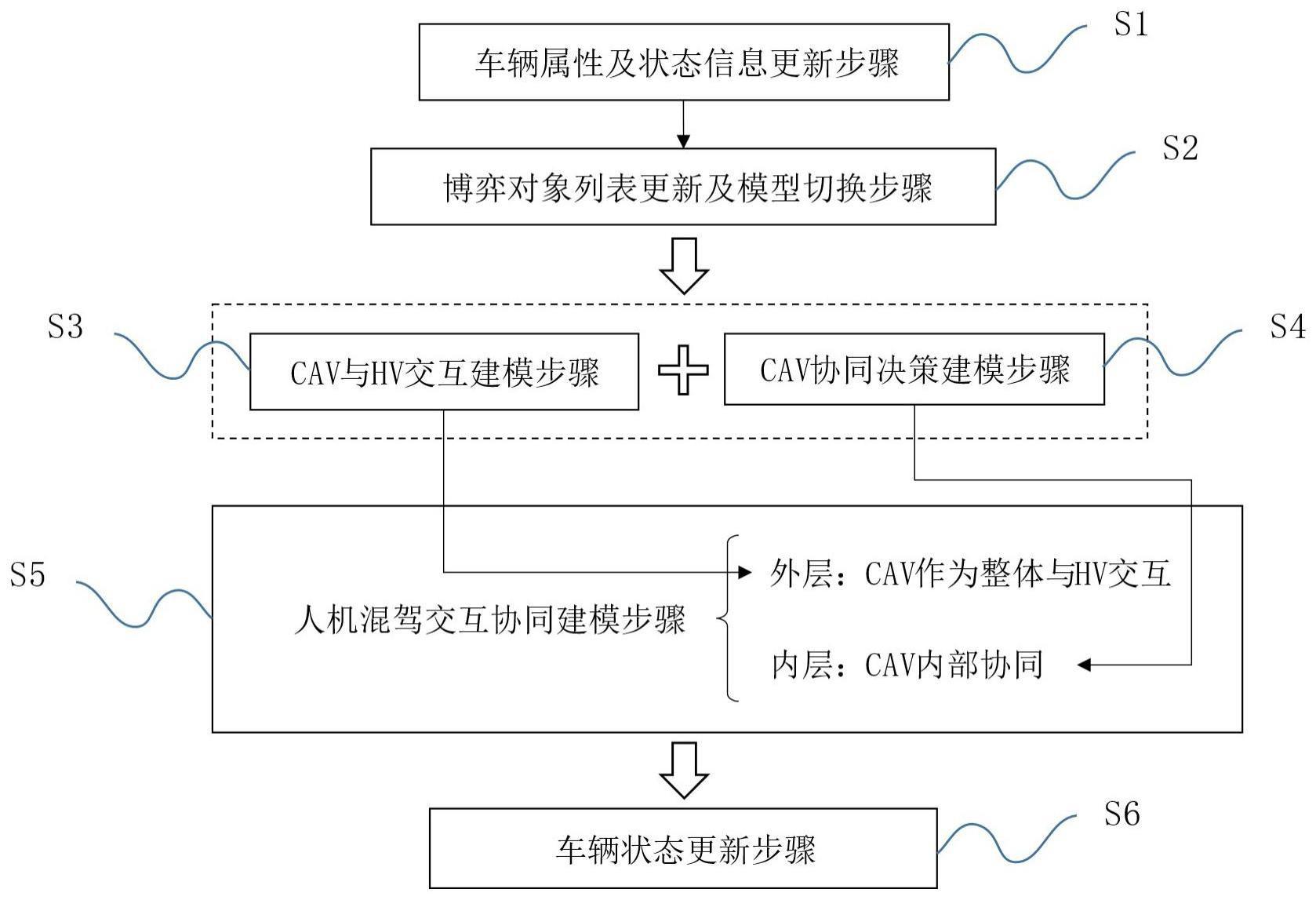
3、一种人机混驾环境下的多车协同决策方法,总涉及构建三个决策模型:cav与hv交互模型、cav协同决策模型、人机混驾交互与协同模型;总涉及包括以下步骤:
4、s1车辆属性及状态信息更新步骤:输入场景中所有车辆的属性信息,包含车辆类型、运动学参数等;车辆状态信息,包含车辆位置、车辆速度、加速度等。
5、s2博弈对象列表更新及模型切换步骤:根据车辆状态,判断进入近冲突区域及冲突区域内的车辆,更新博弈对象列表中所包含的交互与协同车辆;根据博弈对象类型与数量,确定实际执行的模型。
6、s3 cav与hv交互建模步骤:建立cav与hv交互的模型。
7、s4 cav协同决策建模步骤:建立cav车辆内部协同决策的模型。
8、s5人机混驾交互协同建模步骤:耦合上述cav与hv交互模型、cav协同决策模型,进行人机混驾交互协同模型,并进行模型求解,预测博弈对象列表中hv的动作,求解cav的最优动作策略,即加速度。
9、s6车辆状态更新步骤:cav根据输出的加速度决策结果,通过运动学公式实现车辆状态更新,求解更新速度、位置;hv的加速度、速度、位置从环境中重新采集。
10、与现有技术相比,本发明具有以下优点:
11、(1)本发明提出同时考虑混驾场景网联自动驾驶车之间的协同以及网联自动驾驶车与人类驾驶车的交互,更加契合真实的混驾场景且能有效解决单车智能的自动驾驶存在的安全效率问题。
12、(2)本发明通过对人类驾驶车收益函数组分权重相关参数的辨识和动态调整,充分考虑人类驾驶车动态交互过程中的不确定性。
13、(3)本发明所提出基于合作博弈的网联自动驾驶车协同决策模型模型还可适应网联自动驾驶车现实的个性化驾乘需求。
技术特征:
1.一种人机混驾环境下的多车协同决策方法,其特征在于,总涉及构建三个决策模型:cav与hv交互模型、cav协同决策模型、人机混驾交互与协同模型;总涉及包括以下步骤:
2.如权利要求1所述的方法,其特征在于,所述步骤s1中,所述车辆属性及状态信息更新步骤具体为:
3.如权利要求1所述的方法,其特征在于,所述步骤s2中,所述博弈对象列表更新及模型切换步骤,具体为:
4.如权利要求1所述的方法,其特征在于,所述步骤s3中,
5.如权利要求4所述的方法,其特征在于,
6.如权利要求5所述的方法,其特征在于,孪生值个数与适应度对应关系如表1:
7.如权利要求1所述的方法,其特征在于,所述步骤s4中,cav协同决策建模步骤中的协同决策模型具体为:
8.如权利要求1所述的方法,其特征在于,所述步骤s5中,人机混驾交互决策建模步骤中的交互决策模型具体为:
9.如权利要求1所述的方法,其特征在于,所述步骤s6中,根据博弈对象列表选择适当的模型求解最优加速度策略后,进行车辆状态更新;
技术总结
本发明涉及一种人机混驾环境下的多车协同决策方法,包括获取临近冲突区域的车辆属性与车辆状态,基于博弈范围更新博弈车辆列表,根据列表中车辆的类型和数目切换相应的模型进行策略求解;分别通过CAV与HV交互模型、CAV协同决策模型以及两者耦合的人机混驾交互与协同模型推断HV的行动策略最终求解CAV最优策略。与现有技术相比,本方法同时考虑CAV之间的协同以及CAV与HV的交互,且通过最优参数实时调整适应人类驾驶车动态交互过程中的不确定性,实现混驾场景车辆高效安全通行;此外,本方法还可适应CAV的个性化驾乘需求。
技术研发人员:孙剑,杭鹏,崔一鸣
受保护的技术使用者:同济大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!