一种面向再入飞行器的在线轨迹规划与制导方法
本发明属于制导与控制,特别是涉及一种面向再入飞行器的在线轨迹规划与制导方法。
背景技术:
1、跨域飞行再入飞行器飞行剖面复杂,整个过程历经离轨制动、再入机动和高速下压及末制导等多个飞行阶段。其中,再入飞行是整个飞行过程中最关键的飞行阶段,飞行器状态变化剧烈、过程约束终端、飞行环境复杂。当前的常规飞行器制导方法已无法满足高度非线性动力学作用下严苛的多终端/过程约束要求,亟需一种适用于跨域飞行再入的在线轨迹规划与制导方法。
2、现有再入在线轨迹规划与制导方法主要包括以下几类:显式制导法、剖面迭代法、轨迹优化法。显式制导包括迭代制导、闭路制导等,其难以适应受稠密大气作用的非线性动力学模型,一般仅能应用于真空飞行段。剖面迭代法包括在线轨迹设计、预测校正方法,此类方法所得轨迹性能指标不具备最优性,难以适用于多终端约束作用的情况。轨迹优化法包括间接法、直接法,其中间接法对非线性、多约束问题处理能力不足,协态变量初值难估计,在线收敛性差。直接法包括伪谱法、凸优化等,伪谱法需可靠初值,计算量较大,在线应用效果受限。凸优化方法具有无需初值、在多项式时间内得到全局最优解的优势,有着巨大的发展和在线应用潜力,是当前在线轨迹规划领域研究热点,但现有研究模型处理手段单一、离散过程与模型特性不匹配、解算效率低,求解精度难以保证在线应用需求。
3、综上,传统再入轨迹在线规划与制导方法在强过程不确定性、多终端约束作用的条件下,轨迹规划及制导的终端精度及求解快速性难以满足在线应用需求。
技术实现思路
1、本发明的目的是为了解决轨迹规划及制导的终端精度及求解快速性难以满足在线应用需求的问题,提供一种面向再入飞行器的在线轨迹规划与制导方法,该方法可以满足多终端约束轨迹规划与制导较高的实时性要求,能广泛应用于具有相似飞行剖面的高速再入飞行器。
2、本发明的目的是通过以下技术方案实现的:
3、一种面向再入飞行器的在线轨迹规划与制导方法,所述方法为:
4、步骤一:构建以倾侧角变化率为控制量的飞行器再入扩维模型f;
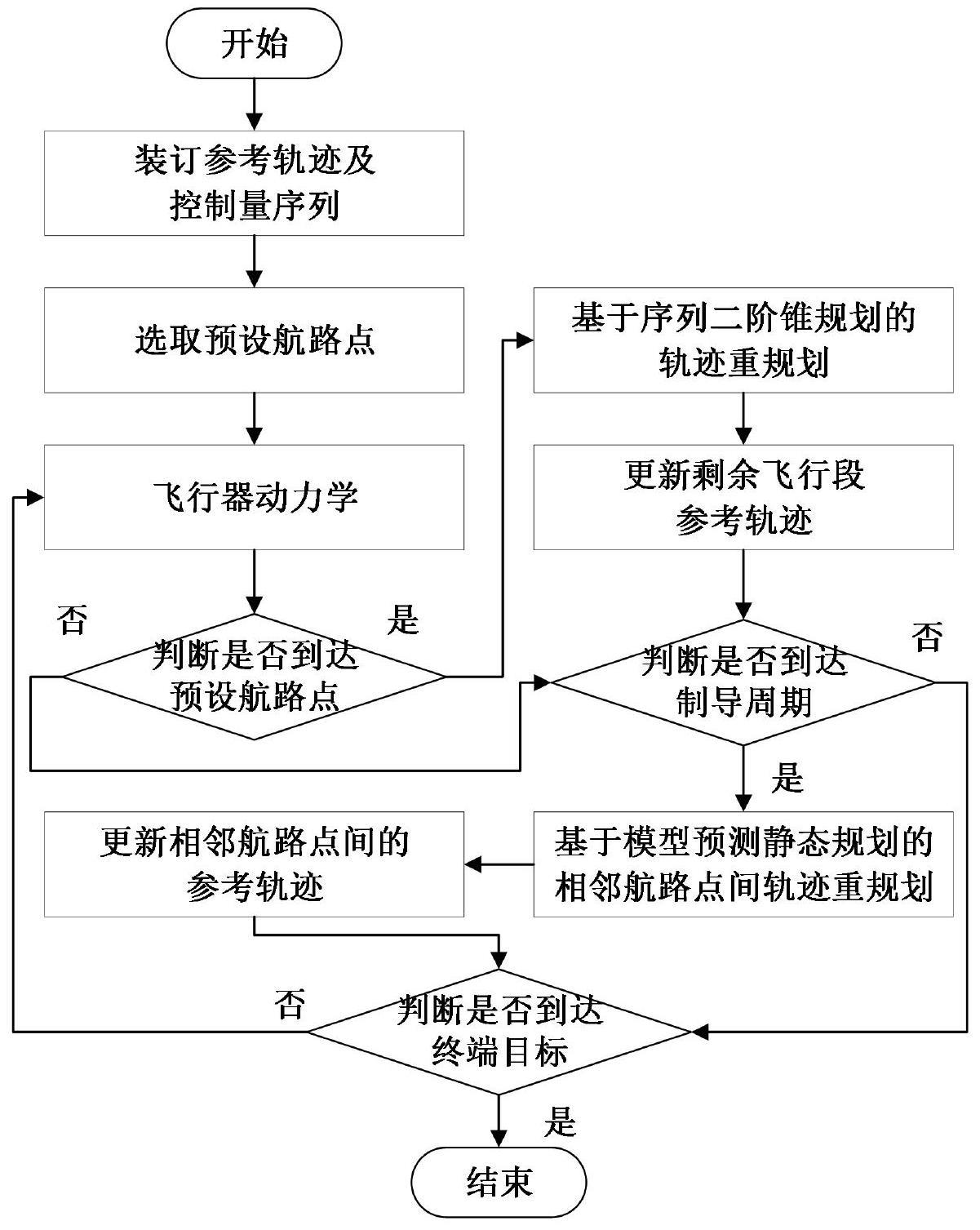
5、步骤二:基于参考轨迹x*预先在整个时间域内均匀选取n个航路点ti,(i=1…n),同时设置制导周期tg;
6、步骤三:根据再入飞行器当前飞行时刻t及参考轨迹x*、控制量序列u*,确定当前时刻控制量u(t),并进行一步动力学积分,得到下一时刻状态;
7、步骤四:判断飞行器是否到达第i个航路点,若到达,则转步骤五;若未到达,则转步骤六;
8、步骤五:以飞行器当前状态量x(t)及终端目标状态x(tf)为轨迹规划的边值条件,基于序列二阶锥规划算法在线求解剩余飞行轨迹,更新参考轨迹x*以及控制量序列u*,转步骤六;
9、步骤六:判断是否到达制导周期,若到达,则首先判断当前飞行时间t所在航路点区间t∈[ti,ti+1],以飞行器当前状态量x(t)及相邻航路点处的标称状态x*(ti+1)为轨迹规划的边值条件,基于模型预测静态规划方法规划当前位置到下一航路点ti+1的剩余飞行轨迹,更新x*以及控制量序列u*,转步骤七;
10、步骤七:判断飞行器是否到达终端目标状态x(tf),若未到达,转步骤三;若满足终端目标条件,则转步骤八;
11、步骤八:再入轨迹在线规划与制导过程结束,输出参考轨迹x*及控制量序列u*。
12、本发明相对于现有技术的有益效果为:
13、本发明方法结合序列二阶锥规划及含松弛因子的模型预测静态规划算法,设计了基于预设航路点的在线轨迹规划与制导流程。飞行器仅在预设航路点处进行剩余全程轨迹在线重规划,相邻两航路点间基于模型预测过程进行轨迹控制量校正,从而能够实现具备高实时性及高精度的在线轨迹规划与制导。
14、本发明方法能够适应再入飞行过程中的飞行器本体及环境不确定性,同时实现对于多终端状态约束的满足,有效提升在线轨迹规划及制导过程的实时性及终端精度。算法简明可靠,具备良好的工程可实现性。
技术特征:
1.一种面向再入飞行器的在线轨迹规划与制导方法,其特征在于:所述方法为:
2.根据权利要求1所述的一种面向再入飞行器的在线轨迹规划与制导方法,其特征在于:所述步骤一的具体步骤为:
3.根据权利要求1所述的一种面向再入飞行器的在线轨迹规划与制导方法,其特征在于:所述步骤五的具体步骤为:
4.根据权利要求1所述的一种面向再入飞行器的在线轨迹规划与制导方法,其特征在于:所述步骤六的具体步骤为:
技术总结
一种面向再入飞行器的在线轨迹规划与制导方法,属于制导与控制技术领域,具体方案如下:该方法结合序列二阶锥规划及含松弛因子的模型预测静态规划算法,设计了基于预设航路点的在线轨迹规划与制导流程。飞行器仅在预设航路点处进行剩余全程轨迹在线重规划,相邻两航路点间基于模型预测过程进行轨迹控制量校正,从而能够实现具备高实时性及高精度的在线轨迹规划与制导。本方法能够适应再入飞行过程中的飞行器本体及环境不确定性,同时实现对于多终端状态约束的满足,有效提升在线轨迹规划及制导过程的实时性及终端精度。算法简明可靠,具备良好的工程可实现性。
技术研发人员:韦常柱,张义忠,詹韬,李强,胡建,刘哲,徐世杰
受保护的技术使用者:哈尔滨工业大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!