一种基于图片坐标对设备在坐标系下运动轨迹的示教方法与流程
本发明属于机械加工,具体为一种基于图片坐标对设备在坐标系下运动轨迹的示教方法。
背景技术:
1、在计算机win10系统自带的画图软件是属于二维坐标x、y下,通过对像素点进行赋值达到绘制简易图画的目的,也具有复制照片或图片到画板之上的功能。我们在修图使用ps软件时都会进行轮廓圈定(选择)的类似操作。
2、工业机器人常见示教方式有两种,示教器示教和拖拽示教。关节型机器人4关节、6关节机器人,桁架机器人,并联蜘蛛手机器人等工业机器人应用于码垛、分拣、搬运、涂胶、焊接等应用场景。
3、但是此类方法不能达到快速部署、快速设置、快速加工、快速拆除的目的,使得在具体操作过程中的操作步骤较为繁琐。
技术实现思路
1、本发明的目的在于:为了解决上述提出的问题,提供一种基于图片坐标对设备在坐标系下运动轨迹的示教方法。
2、本发明采用的技术方案如下:一种基于图片坐标对设备在坐标系下运动轨迹的示教方法,所述基于图片坐标对设备在坐标系下运动轨迹的示教方法包括在线示教模式和离线示教模式;
3、所述在线示教模式使用时画板之上有描述坐标的网格,通过移动鼠标控制设备运动,看设备实际位置与情况后在对此位置点进行相应参数设置;
4、所述离线示教模式使用时设备具有照相机拍照功能,当取得工件在夹具、工作台上的照片后,跟具照片中工件姿态、轮廓、色彩特征来选择位置点后对此位置点进行相应参数设置;
5、所述基于图片坐标对设备在坐标系下运动轨迹的示教方法包括以下步骤:
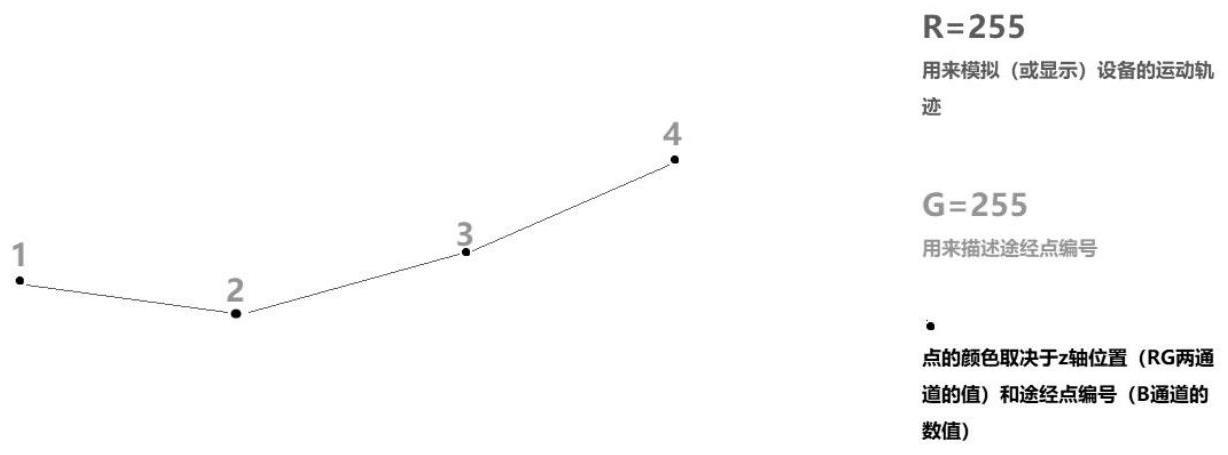
6、s1、以图片的数据信息格式来储存设备运动轨迹,rgb三通道其中两通(rg)储存z轴位置数据,b通道表示途经点编号,编号为0时g通道为255其它通道为0用来在图片上标注出途经点编号,图片上显示与编号对应数字数字符号为绿色,r通道为255其它通道为0用来在图片上标注出红色的线条来表述设备运动轨迹;
7、s2、鼠标相对于图片上的位置或相对于示教窗口的位置来控制设备的运动;
8、s3、通过图片坐标与设备坐标重合来表示设备运动轨迹;
9、s4、通过对工件拍照和人为工件特征判别得到工件在图片坐标系下位置,也间接得到在设备坐标系下位置。
10、在一优选的实施方式中,所述在线示教模式使用时包括以下步骤:
11、s1、根据对工件加工要求选择用途如:涂胶、焊接、搬运;
12、s2、通过绘图窗口中的鼠标移动来控制设备在x、y方向的运动;
13、s3、鼠标移动到理想位置,看设备实际运行情况是否符合操作者设想的设备状态;
14、s4、通过参数设置或功能按键的形式对设备进行z方向移动控制;
15、s5、此时设备到达移动轨迹点1;
16、s6、按下鼠标右键弹出功能选择菜单或键盘上快捷键,来选择功能性指令或命令,如:涂胶机的涂胶开始、涂胶结束;焊接工作站的起弧、灭弧、焊接、保护气、夹具气缸动作;搬运工作站中气缸伸出、气缸退回;i/o点的离散量信号判断与控制;模拟量和数字量的比较、读取、赋值等;功能性指令或动作;
17、s7、功能设置完后可重复设置其它功能性指令或命令;
18、s8、重复步骤s2-s7,实现对其它位置点的设定和功能性指令或命令;
19、s9、轨迹示教完成后可手动单步运行来检验示教结果。
20、在一优选的实施方式中,所述步骤s6中,功能性指令包括涂胶机的涂胶开始、涂胶结束;焊接工作站的起弧、灭弧、焊接、保护气、夹具气缸动作。
21、在一优选的实施方式中,所述步骤s6中,功能性命令包括搬运工作站中气缸伸出、气缸退回;i/o点的离散量信号判断与控制;模拟量和数字量的比较、读取、赋值等;功能性指令或动作。
22、在一优选的实施方式中,所述在离线示教模式
23、s1、根据对工件加工要求选择用途如:涂胶、焊接、搬运;
24、s2、设备自带照相机进行拍照;
25、s3、照片加载到绘图窗口中;
26、s4、跟具照片中工件姿态、轮廓、色彩特征来选择位置点;
27、s5、按下鼠标右键弹出功能选择菜单或键盘上快捷键,来选择功能性指令或命令;
28、s6、功能设置完后可重复设置其它功能性指令或命令;
29、s7、重复步骤s4-s6,实现对其它位置点的设定和功能性指令或命令;
30、s8、轨迹示教完成后可手动单步运行来检验示教结果。
31、在一优选的实施方式中,所述步骤s5中,功能性指令包括涂胶机中出胶开始、出胶结束;焊接工作站中起弧、灭弧、焊接、保护气、夹具气缸动作等功能性指令或动作。
32、在一优选的实施方式中,所述功能性指令包括搬运工作站气缸打来、气缸关闭;i/o点的离散量信号判断与控制;模拟量或数字量的比较、读取、赋值。
33、综上所述,由于采用了上述技术方案,本发明的有益效果是:
34、1、本发明中,应用于小型加工厂或个人加工作坊,通过操作简单、设备制造成本低、结构简单等特点,降低对工艺要求不高的工序或工艺加工的人工成本。铁艺作坊:对小的焊接件进行焊接工作,由于示教简单所以可以应用于工件种类繁多的加工需求。便捷式移动焊接:对大型不可移动的工件进行焊接,设备移动到焊接位置,由于通过简单示教方式,单次示教单次焊接。达到快速部署、快速设置、快速加工、快速拆除的目的。涂胶机:与焊接功能类似,只是把焊机换成涂胶机,运动与控制平台共用。具有操作简单、兼容性强、安装调试周期短等特点。搬运功能:执行机构选择大型桁架,通过此示教方式与控制实现搬运功能。
35、2、本发明中,通过简易示教对设备进行运动轨迹的示教,使设备在运动过程中完成涂胶、焊接、搬运等工作目的。这种示教方法降低了设备操作的技术门槛,提高了示教过程中操作人员的安全性,工业机器人或设备示教方法有两种,第一种示教器示教,这种方法对操作人员的技术能力要求高,第二种拖拽示教,这种方法需要操作人员与设备直接接触,如果设备误动作会存在安全隐患。
技术特征:
1.一种基于图片坐标对设备在坐标系下运动轨迹的示教方法,其特征在于:所述基于图片坐标对设备在坐标系下运动轨迹的示教方法包括在线示教模式和离线示教模式;
2.如权利要求1所述的一种基于图片坐标对设备在坐标系下运动轨迹的示教方法,其特征在于:所述在线示教模式使用时包括以下步骤:
3.如权利要求2所述的一种基于图片坐标对设备在坐标系下运动轨迹的示教方法,其特征在于:所述步骤s6中,功能性指令包括涂胶机的涂胶开始、涂胶结束;焊接工作站的起弧、灭弧、焊接、保护气、夹具气缸动作。
4.如权利要求1所述的一种基于图片坐标对设备在坐标系下运动轨迹的示教方法,其特征在于:所述步骤s6中,功能性命令包括搬运工作站中气缸伸出、气缸退回;i/o点的离散量信号判断与控制;模拟量和数字量的比较、读取、赋值等;功能性指令或动作。
5.如权利要求1所述的一种基于图片坐标对设备在坐标系下运动轨迹的示教方法,其特征在于:所述在离线示教模式
6.如权利要求5所述的一种基于图片坐标对设备在坐标系下运动轨迹的示教方法,其特征在于:所述步骤s5中,功能性指令包括涂胶机中出胶开始、出胶结束;焊接工作站中起弧、灭弧、焊接、保护气、夹具气缸动作等功能性指令或动作。
7.如权利要求5所述的一种基于图片坐标对设备在坐标系下运动轨迹的示教方法,其特征在于:所述功能性指令包括搬运工作站气缸打来、气缸关闭;i/o点的离散量信号判断与控制;模拟量或数字量的比较、读取、赋值。
技术总结
本发明公开了一种基于图片坐标对设备在坐标系下运动轨迹的示教方法。本发明中,应用于小型加工厂或个人加工作坊,通过操作简单、设备制造成本低、结构简单等特点,降低对工艺要求不高的工序或工艺加工的人工成本。铁艺作坊:对小的焊接件进行焊接工作,由于示教简单所以可以应用于工件种类繁多的加工需求。便捷式移动焊接:对大型不可移动的工件进行焊接,设备移动到焊接位置,由于通过简单示教方式,单次示教单次焊接。达到快速部署、快速设置、快速加工、快速拆除的目的。涂胶机:具有操作简单、兼容性强、安装调试周期短等特点。
技术研发人员:张帅
受保护的技术使用者:张帅
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!