控制清洁机器人寻找基站的方法、清洁机器人和存储介质与流程
本发明涉及清洁机器人,特别涉及控制清洁机器人寻找基站的方法、清洁机器人和计算机可读存储介质。
背景技术:
1、在相关技术中,清洁机器人配置有基站,基站可以为清洁机器人提供充电、清洗拖布、收集灰尘等服务。通常情况下,基站的位置被预先标记在清洁机器人存储的地图中。但是,如果基站被用户移动到其他位置,清洁机器人的地图上标记的基站的位置将会失效,导致清洁机器人无法找到基站。
技术实现思路
1、本发明实施方式提供了控制清洁机器人寻找基站的方法、清洁机器人和计算机可读存储介质以解决上述存在的至少一个技术问题。
2、本发明实施方式的一种控制清洁机器人寻找基站的方法包括:
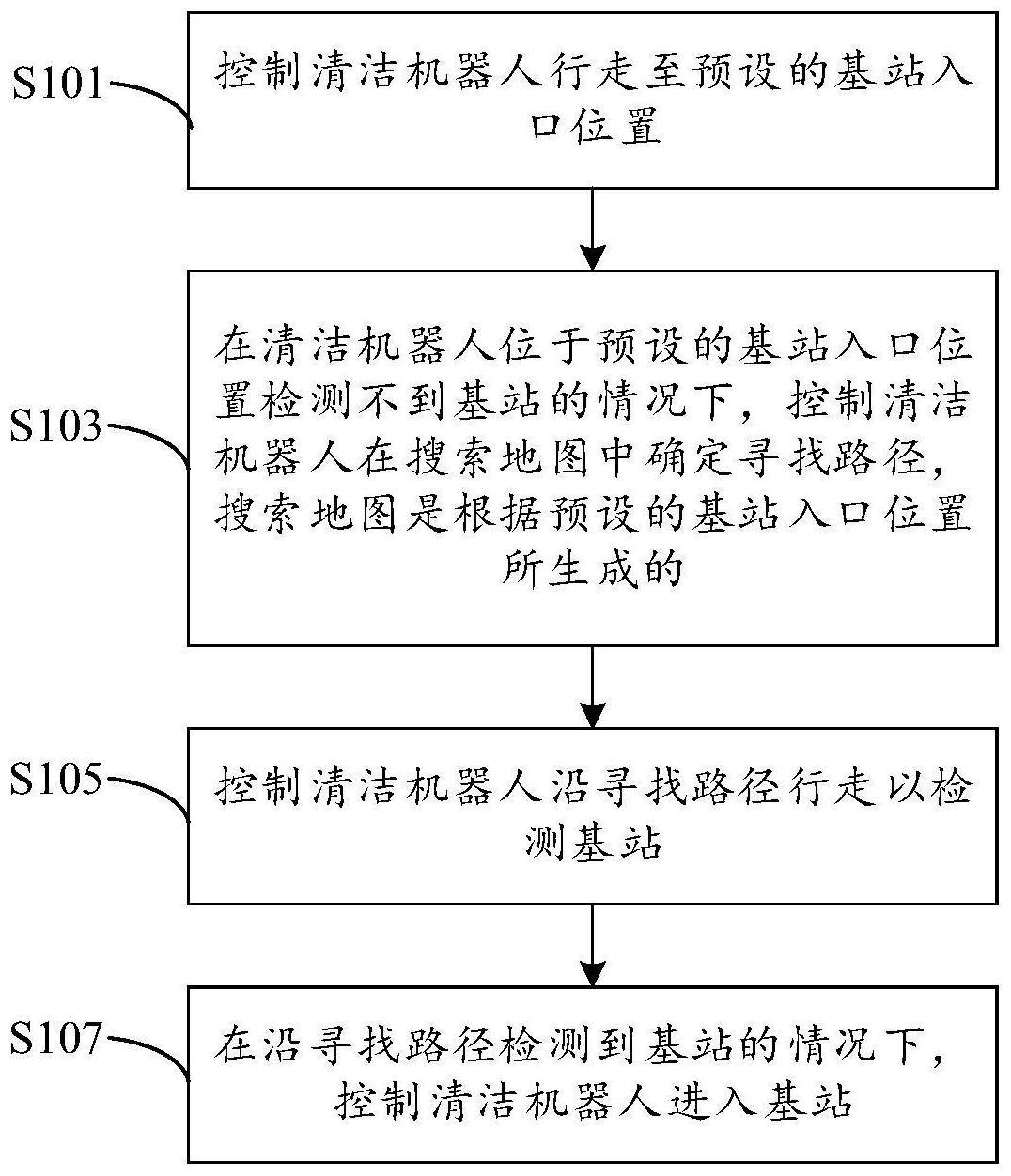
3、控制所述清洁机器人行走至预设的基站入口位置;
4、在所述清洁机器人位于所述预设的基站入口位置检测不到所述基站的情况下,控制所述清洁机器人在搜索地图中确定寻找路径,所述搜索地图是根据所述预设的基站入口位置所生成的;
5、控制所述清洁机器人沿所述寻找路径行走以检测所述基站;
6、在沿所述寻找路径检测到所述基站的情况下,控制所述清洁机器人进入所述基站。
7、上述控制清洁机器人寻找基站的方法,可在搜索地图确定寻找路径并沿寻找路径寻找基站,进而实现控制清洗机器人寻找基站及进入基站。
8、在某些实施方式中,所述搜索地图是以所述预设的基站入口位置为参考点在预设范围内所确定的搜索区域。
9、在某些实施方式中,所述寻找路径包括所述搜索地图的边界路径、位于所述搜索地图内的障碍物的边缘路径和位于所述搜索地图的边界上的障碍物的边缘路径中的至少一种。
10、在某些实施方式中,所述控制所述清洁机器人沿所述寻找路径行走以检测所述基站包括:
11、根据所述搜索地图内距离所述清洁机器人当前位置最近的障碍物或所述搜索地图的边界确定所述寻找路径;
12、控制所述清洁机器人沿所述寻找路径行走以检测所述基站。
13、在某些实施方式中,所述控制所述清洁机器人沿所述寻找路径行走以检测所述基站包括:
14、在所述搜索地图的边界上有障碍物的情况下,控制所述清洁机器人在沿所述寻找路径行走时,从所述障碍物在所述搜索地图范围内的边缘路径围绕所述障碍物行走。
15、在某些实施方式中,所述控制所述清洁机器人沿所述寻找路径行走以检测所述基站包括:
16、控制所述清洁机器人根据所述寻找路径更新所述搜索地图,所述搜索地图中包括已行走过的寻找路径和未行走过的寻找路径;
17、控制所述清洁机器人从当前位置沿所述未行走过的寻找路径行走以检测所述基站。
18、在某些实施方式中,所述未行走过的寻找路径包括与所述当前位置相距最近的所述搜索地图的边界路径或位于所述搜索地图内的障碍物的边缘路径中的至少一部分路径。
19、在某些实施方式中,所述控制所述清洁机器人沿所述寻找路径行走以检测所述基站包括:
20、确定所述寻找路径上距离所述清洁机器人的当前位置最近的位置为所述寻找路径的起点;
21、在所述当前位置与所述起点之间有障碍物的情况下,控制所述清洁机器人从所述当前位置出发,绕过所述障碍物到达所述起点;
22、控制所述清洁机器人沿所述寻找路径行走以检测所述基站。
23、在某些实施方式中,所述方法包括:
24、在沿所述寻找路径未检测到所述基站的情况下,控制所述清洁机器人停止寻找所述基站和/或上报信息。
25、在某些实施方式中,所述方法包括:
26、在沿所述寻找路径未检测到所述基站的情况下,根据预设区域控制所述清洁机器人在所述预设区域中行走以检测所述基站,所述预设区域为所述预设的基站入口位置所在的区域;
27、在所述清洁机器人在所述预设区域中行走未检测到所述基站的情况下,控制所述清洁机器人停止寻找所述基站和/或上报信息。
28、本发明实施方式的一种清洁机器人,包括处理器和存储器,所述存储器存储有计算机程序,所述计算机程序在被所述处理器执行时实现上述实施方式任一项所述的控制清洁机器人寻找基站的方法的步骤。
29、本发明实施方式的一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序在被处理器执行时,实现上述实施方式任一项所述的控制清洁机器人寻找基站的方法的步骤。
30、上述清洁机器人计算机可读存储介质,可在搜索地图确定寻找路径并沿寻找路径寻找基站,进而实现控制清洗机器人寻找基站及进入基站。
31、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种控制清洁机器人寻找基站的方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述搜索地图是以所述预设的基站入口位置为参考点在预设范围内所确定的搜索区域。
3.根据权利要求1所述的方法,其特征在于,所述寻找路径包括所述搜索地图的边界路径、位于所述搜索地图内的障碍物的边缘路径和位于所述搜索地图的边界上的障碍物的边缘路径中的至少一种。
4.根据权利要求3所述的方法,其特征在于,所述控制所述清洁机器人沿所述寻找路径行走以检测所述基站包括:
5.根据权利要求4所述的方法,其特征在于,所述控制所述清洁机器人沿所述寻找路径行走以检测所述基站包括:
6.根据权利要求1所述的方法,其特征在于,所述控制所述清洁机器人沿所述寻找路径行走以检测所述基站包括:
7.根据权利要求6所述的方法,其特征在于,所述未行走过的寻找路径包括与所述当前位置相距最近的所述搜索地图的边界路径或位于所述搜索地图内的障碍物的边缘路径中的至少一部分路径。
8.根据权利要求1所述的方法,其特征在于,所述控制所述清洁机器人沿所述寻找路径行走以检测所述基站包括:
9.根据权利要求1所述的方法,其特征在于,所述方法包括:
10.根据权利要求1所述的方法,其特征在于,所述方法包括:
11.一种清洁机器人,其特征在于,所述清洁机器人包括:
12.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1-10任一项所述的控制清洁机器人寻找基站的方法。
技术总结
本发明公开了一种控制清洁机器人寻找基站的方法、清洁机器人和存储介质,一种控制清洁机器人寻找基站的方法包括:控制所述清洁机器人行走至预设的基站入口位置;在所述清洁机器人位于所述预设的基站入口位置检测不到所述基站的情况下,控制所述清洁机器人在搜索地图中确定寻找路径,所述搜索地图是根据所述预设的基站入口位置所生成的;控制所述清洁机器人沿所述寻找路径行走以检测所述基站;在沿所述寻找路径检测到所述基站的情况下,控制所述清洁机器人进入所述基站。上述控制清洁机器人寻找基站的方法,可在搜索地图确定寻找路径并沿寻找路径寻找基站,进而实现控制清洗机器人寻找基站及进入基站。
技术研发人员:龚鼎,钟皇平,杜川,杨永森
受保护的技术使用者:云鲸智能(深圳)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!