一种机器人避让方法、装置及电子设备与流程
本申请涉及机器人,尤其涉及一种机器人避让方法、装置及电子设备。
背景技术:
1、室内存在较长的长直通道场景,例如餐厅过道,机器人在这样的环境下进行流动作业时,经常遇到与动态障碍物,如行人相向运动的情况,此时,如果行人和机器人处于通道中,且机器人未处于靠边运动的情况下,一旦检测到前方出现堵塞场景,则机器人会在相对行人一定距离时触发被动式避让,停止在原地,等待行人方进行避让动作。
2、由此可见,现有的避让方式属于被动式避让,需要停止在原地,被动的等待通道让出足够空间后,机器人才会结束避让恢复路线和运动,效率较低的同时影响人的正常通行。
技术实现思路
1、有鉴于此,本申请的目的在于至少提供一种机器人避让方法、装置及电子设备,通过识别通道和堵塞场景,主动选取避让点并前往避让点进行主动避让,减少了堵塞通道的概率,提高机器人工作效率。
2、本申请主要包括以下几个方面:
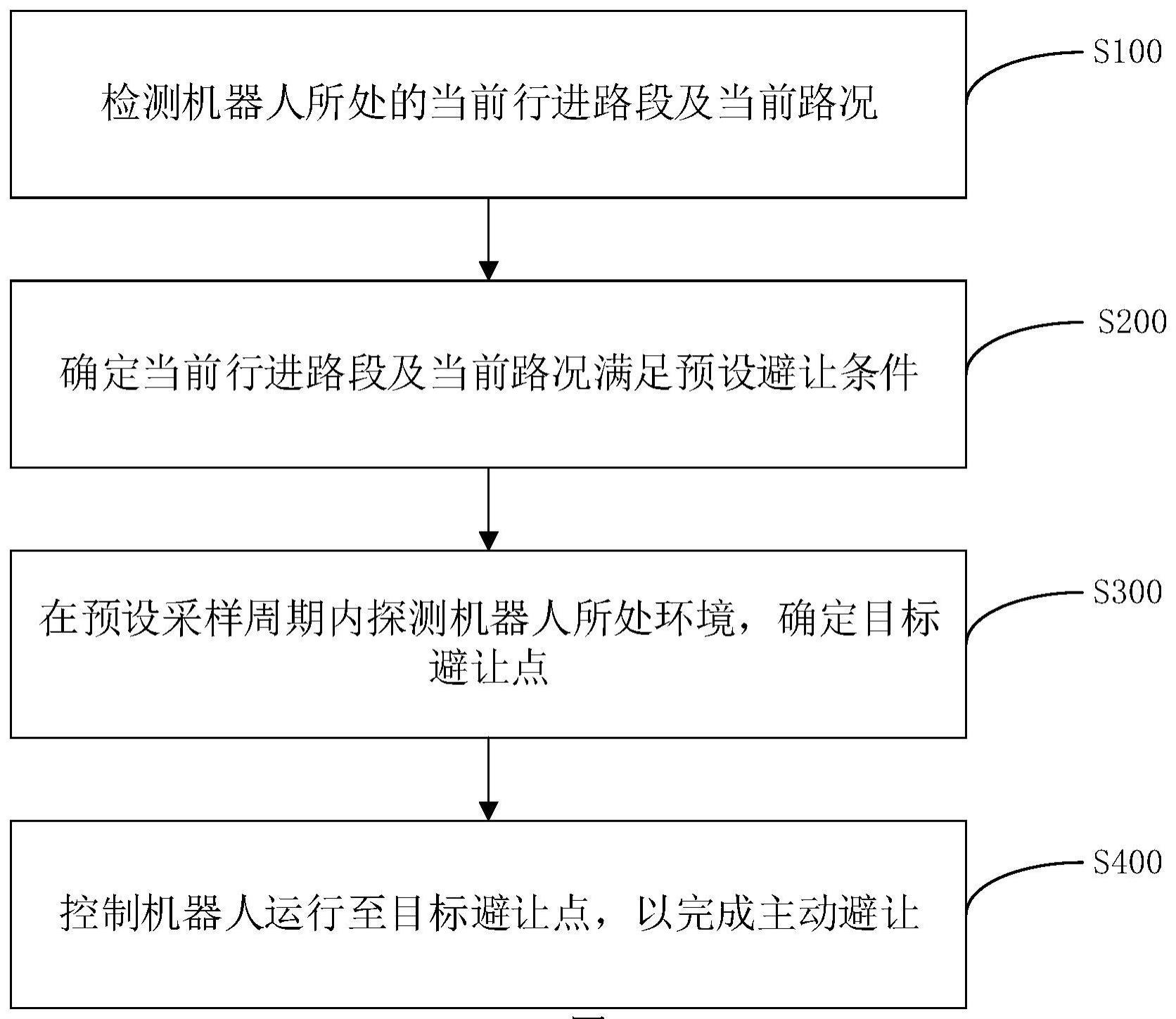
3、第一方面,本申请实施例提供一种机器人避让方法,方法包括:检测机器人所处的当前行进路段及当前路况;确定当前行进路段及当前路况满足预设避让条件,预设避让条件包括当前行进路段为通道路段、当前路况为堵塞且造成堵塞的为动态障碍物;在预设采样周期内探测机器人所处环境,确定目标避让点;控制机器人运行至目标避让点,以完成主动避让。
4、在一种可能的实施方式中,行进路段包括通道路段和非通道路段,其中,通过以下方式确定当前行进路段:在预先规划出的从预设起点至预设终点的行进路线上,确定机器人当前行进位置对应的最近路径点,行进路线包括多个路径点;判断最近路径点是否属于通道路径点;若属于通道路径点,则确定当前行进路段为通道路段;若不属于通道路径点,则确定当前行进路段为非通道路段。
5、在一种可能的实施方式中,通道路径点通过以下方式预先得到:对行进路线进行首次路线规划计算,在首次规划计算的过程中,对规划出的每个路径点:根据行进环境对应的静态地图,若确定该路径点两侧均存在障碍物,则记录该路径点的通道宽度;利用滑动窗口算法对预设窗口范围内的路径点的通道宽度和路径方向作平均处理,以得到该路径点对应的处理后的通道宽度;根据处理后的通道宽度,确定该路径点是否属于通道路径点。
6、在一种可能的实施方式中,通过以下方式确定目标避让点:在预设采样周期内使用随机采样法探测到的机器人所处环境的多个探测点;基于机器人周围的障碍物,利用膨胀算法对多个探测点进行膨胀计算,以从多个探测点中确定多个候选避让点;按照可通过性评估策略从多个候选避让点中确定目标避让点。
7、在一种可能的实施方式中,通过以下方式确定目标避让点:在预设采样周期内探测机器人所处环境,按照可通过性评估策略对多个候选避让点进行有效避让点搜索;若多个候选避让点中存在有效避让点,则停止搜索,得到至少一个有效避让点;按照多个弱约束条件对至少一个有效避让点进行评估,以从至少一个有效避让点中确定目标避让点;若多个候选避让点中不存在有效避让点,则下发减速指令,并执行下一采样周期,重新确定多个候选避让点。
8、在一种可能的实施方式中,按照可通过性评估策略从多个候选避让点中,确定目标避让点的步骤包括:针对每个候选避让点,执行以下处理:将机器人投影至该候选避让点并获取动态障碍物位置;规划动态障碍物到该候选避让点左右两侧的路线;若该候选避让点左右两侧中的任一侧路线规划成功,则将该候选避让点确定为有效避让点;若该候选避让点左右两侧对应的路线均规划失败,则确定该候选避让点为无效避让点。可选地,采用dijkstra算法评估通过性,确保避让出足够行人通过宽度。
9、在一种可能的实施方式中,按照多个弱约束条件对至少一个有效避让点进行评估,以从至少一个有效避让点中确定目标避让点的步骤包括:针对每个弱约束条件,执行以下处理:获取该弱约束条件对应的评估参数;根据评估参数和该弱约束条件,确定该有效避让点在该弱约束条件下的评估指数,弱约束条件定义了评估参数与评估指数之间的计算函数;针对每个有效避让点,对该有效避让点对应的评估指数之间进行加权求和,确定该有效避让点对应的有效避让指数;将有效避让指数最小的有效避让点,确定为目标避让点。
10、在一种可能的实施方式中,多个弱约束条件包括速度约束条件、通道宽度约束条件、有效避让点与两侧障碍物之间的第一距离约束条件和有效避让点与动态障碍物之间的第二距离约束条件,其中,通过以下方式确定每个有效避让点的有效避让指数:将该有效避让点处机器人的行进速度带入速度约束条件所指示的计算函数,得到该有效避让点在速度约束条件的第一评估指数;将该有效避让点对应的通道宽度带入通道宽度约束条件所指示的计算函数,得到该有效避让点在通道宽度约束条件的第二评估指数;将该有效避让点与两侧障碍物之间的距离值带入第一距离约束条件所指示的计算函数,得到该有效避让点在第一距离约束条件下的第三评估指数;将该有效避让点与动态障碍物之间的距离值带入第二距离约束条件所指示的计算函数,得到该有效避让点在第二距离约束条件下的第四评估指数;对该有效避让点对应的第一评估指数、第二评估指数、第三评估指数和第四评估指数之间进行加权求和,确定该有效避让点对应的有效避让指数。
11、第二方面,本申请实施例还提供一种机器人避让装置,装置包括:检测模块,用于检测机器人所处的当前行进路段及当前路况;判断模块,用于确定当前行进路段及当前路况满足预设避让条件,预设避让条件包括当前行进路段为通道路段、当前路况为堵塞且造成堵塞的为动态障碍物;确定模块,用于在预设采样周期内探测机器人所处环境,确定目标避让点;避让模块,用于控制机器人运行至目标避让点,以完成主动避让。
12、第三方面,本申请实施例还提供一种电子设备,包括:处理器、存储器和总线,存储器存储有处理器可执行的机器可读指令,当电子设备运行时,处理器与存储器之间通过总线进行通信,机器可读指令被处理器运行时执行上述第一方面或第一方面中任一种可能的实施方式中提供的机器人避让方法的步骤。
13、本申请实施例提供的一种机器人避障让方法、装置及电子设备,方法包括:检测机器人所处的当前行进路段及当前路况;确定当前行进路段及当前路况满足预设避让条件,预设避让条件包括当前行进路段为通道路段、当前路况为堵塞且造成堵塞的为动态障碍物;在预设采样周期内探测机器人所处环境,确定目标避让点;控制机器人运行至目标避让点,以完成主动避让。本申请中,在机器人运行过程中引入通道路段识别和堵塞识别,在堵塞场景触发,且造成堵塞的障碍物为动态障碍物时,主动选取并移动至目标避让点,控制机器人进行主动避让,进而减少通道堵塞概率,提高机器人工作效率。
14、为使本申请的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
技术特征:
1.一种机器人避让方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述行进路段包括通道路段和非通道路段,
3.根据权利要求2所述的方法,其特征在于,所述通道路径点通过以下方式预先得到:
4.根据权利要求1所述的方法,其特征在于,通过以下方式确定所述目标避让点:
5.根据权利要求1所述的方法,其特征在于,通过以下方式确定所述目标避让点:
6.根据权利要求5所述的方法,其特征在于,按照可通过性评估策略对多个候选避让点进行有效避让点搜索的步骤包括:
7.根据权利要求6所述的方法,其特征在于,按照多个弱约束条件对所述至少一个有效避让点进行评估,以从所述至少一个有效避让点中确定目标避让点的步骤包括:
8.根据权利要求7所述的方法,其特征在于,所述多个弱约束条件包括速度约束条件、通道宽度约束条件、有效避让点与两侧障碍物之间的第一距离约束条件和有效避让点与动态障碍物之间的第二距离约束条件,
9.一种机器人避让装置,其特征在于,所述装置包括:
10.一种电子设备,其特征在于,包括:处理器、存储器和总线,所述存储器存储有所述处理器可执行的机器可读指令,当电子设备运行时,所述处理器与所述存储器之间通过所述总线进行通信,所述机器可读指令被所述处理器运行时执行如权利要求1至8任一所述的机器人避让方法的步骤。
技术总结
本申请提供了一种机器人避让方法、装置及电子设备,方法包括:检测机器人所处的当前行进路段及当前路况;确定当前行进路段及当前路况满足预设避让条件,预设避让条件包括当前行进路段为通道路段、当前路况为堵塞且造成堵塞的为动态障碍物;在预设采样周期内探测机器人所处环境,确定目标避让点;控制机器人运行至目标避让点,以完成主动避让。本申请中引入通道和堵塞场景识别,机器人在堵塞场景触发时主动选取并移动至目标避让点,减少通道堵塞概率。
技术研发人员:李通,解维治,黄柏伟,马帅,杨亚运,曹中益
受保护的技术使用者:上海擎朗智能科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!