基于鲁棒H∞理论的PGK制导弹箭控制方法
本发明属于导航与制导领域,具体涉及一种基于鲁棒h∞理论的pgk制导弹箭控制方法。
背景技术:
1、在现代导弹任务中,提高制导系统的精度是最重要也是最困难的过程。本文主要研究的是pgk(精确制导组件)制导弹箭控制系统的设计,它直接影响制导弹箭外弹道的中段飞行的精确性和稳定性。弹箭在飞行过程中的气动参数受高度、速度等飞行条件的影响而产生比较大的变化。为了实现对弹箭的有效控制,弹体通常是严重欠阻尼的,甚至是静不稳定的,虽然可以大大改善其操纵能力,但使得弹体的飞行稳定性变差,因此需要引入自动驾驶仪来加快弹体响应速度,改善阻尼、提供抗干扰能力,并精确、鲁棒地跟踪输入指令。制导弹箭控制系统,主要是指弹箭的执行机构、弹体及相应的控制器等构成的闭环系统,弹箭控制系统设计实质上就是自动驾驶仪设计。
2、国内外学者针对不同的弹箭进行了很多研究,其中主要研究成果按照设计理论不同可以分为经典控制理论、现代控制理论和非线性控制理论。
3、经典控制理论的研究对象主要是单输入—单输出的线性定常系统。通常采用的研究方法主要有根轨迹法和bode图法两大类,但同时还包括以各种代数稳定性判据为基础的分析和综合等方法。经典控制理论在解决比较简单的控制系统的分析和设计问题方面是很有效的,但仍然存在一定的局限性,主要表现在只适用于单变量系统,且仅限于研究定常系统。
4、现代控制理论以状态空间模型为基础,采用状态方程来描述多输入—多输出的线性时变系统,研究了系统的内在规律,包括线性系统分析与综合、最优控制理论、系统辨识和最优估计理论等,有能控性、能观测性等主要概念。现代控制理论比经典控制理论所能处理的控制问题要广泛得多,包括线性系统和非线性系统,定常系统和时变系统,单变量系统和多变量系统。但是,由于不同的控制理论都有不同的假设和方法,这些理论之间缺乏一致性,导致现代控制理论缺乏一个统一的框架。此外,不同的控制理论之间也缺乏充分的交流,所以很难将不同的控制理论组合起来。
5、鲁棒控制理论继承了以往的鲁棒性研究方法,以基于状态空间模型的频率设计方法为主要特征,提出了从根本上解决控制对象模型不确定性和外界扰动不确定性问题的有效方法,不仅能够用于单输入单输出反馈控制系统的鲁棒性分析与设计,而且可以成功地应用到多输入多输出的场合,能够设计出性能更优、鲁棒性更好的反馈控制系统。
技术实现思路
1、本发明的目的在于提供一种制导弹箭的控制方法,旨在利用鲁棒h∞理论,完成制导弹箭控制系统的设计,实现对制导弹箭过载自动驾驶仪的俯仰和偏航通道输入指令稳定、精确地跟踪,改善pgk制导弹箭的飞行稳定性。
2、实现本发明目的的技术解决方案为:基于鲁棒h∞理论的pgk制导弹箭控制方法,包括如下步骤:
3、步骤(1):建立pgk制导弹箭的控制系统模型;
4、步骤(2):设计pgk制导弹箭的自动驾驶仪,简化成鲁棒h∞标准型结构;
5、步骤(3):利用鲁棒h∞理论,设计pgk制导弹箭自动驾驶仪的控制方法。
6、进一步的,所述步骤(1)具体包括如下步骤:
7、步骤(11):建立制导弹箭7dof控制系统模型
8、该模型包括8个变量[α β ωz ωy ny nz δy δz]t,分别是攻角α、侧滑角β、俯仰角速度ωz、偏航角速度ωy、俯仰过载ny、偏航过载nz、等效俯仰舵偏角δz、等效偏航舵偏角δy;
9、
10、步骤(12):将模型的微分方程组,写成状态空间表达式
11、设置状态变量:x=[α,ωz,β,ωy]τ,控制变量:u=[δz,δy]τ,输出变量y=[nz,ny,ωz,ωy]τ。
12、
13、其中,状态矩阵表达式为:
14、
15、
16、输出矩阵分解为c=[ca,cω]τ,从而将加速度变量和角速度变量分成两个子阵。
17、进一步的,步骤(2)具体包括如下步骤:
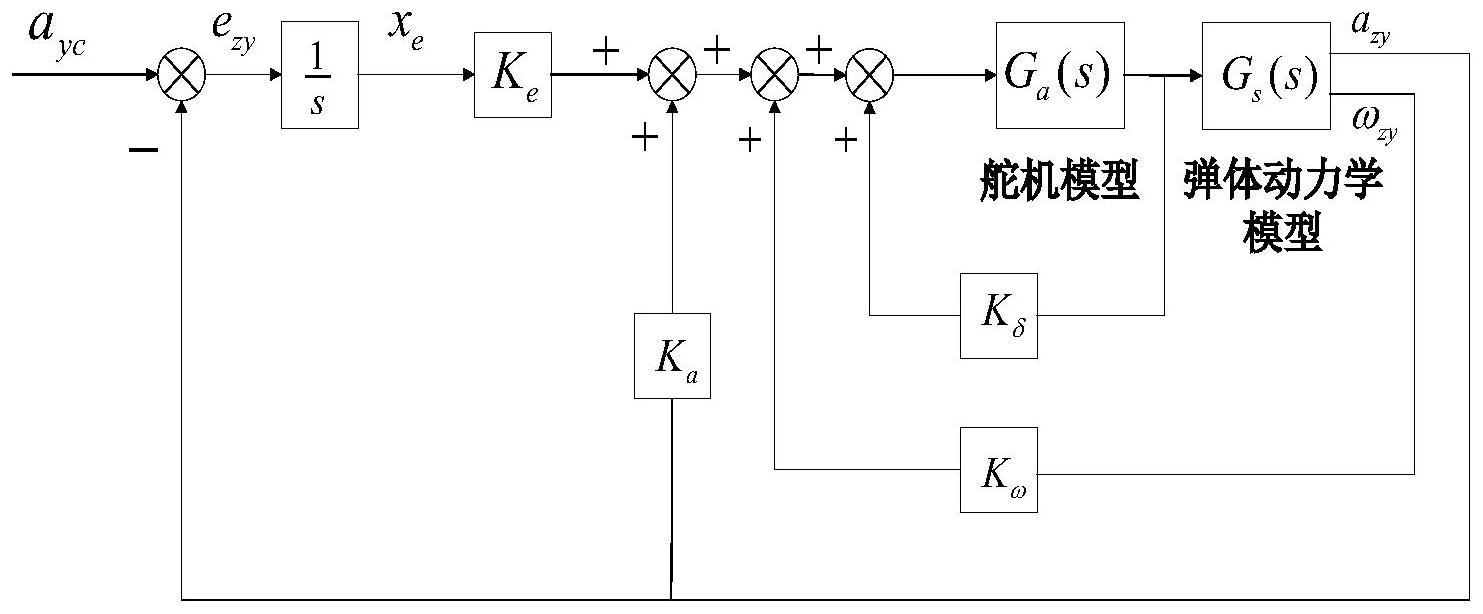
18、步骤(21):选择制导弹箭的过载控制自动驾驶仪
19、三回路自动驾驶仪反馈控制结构由控制弹体姿态稳定的阻尼回路、增稳回路和制导回路组成;
20、步骤(22):化简制导弹箭的过载控制自动驾驶仪结构
21、将自动驾驶仪模型整理为h∞鲁棒控制自动驾驶仪的标准结构。
22、进一步的,所述步骤(3)具体包括如下步骤:
23、步骤(31):建立被控系统的h∞标准型状态空间表达式;
24、将自动驾驶仪的标准结构写成带有扰动w和被调输出的h∞意义下的被控模型的状态空间方程:
25、
26、步骤(32):构建开环系统的输入/输出传递方程
27、设置参考加速度信号w=azyc=[azc,ayc]τ,加速度追踪偏差信号z=ezy=azyc-azy,系统状态变量yc=[xe,azy,ωzy]τ,控制变量uc=δzy=[δz,δy]τ。
28、
29、加入状态动力学积分xe=∫eyz(t)dt,开环动力学模型写为:
30、
31、
32、其中,增广状态矢量的动力学方程定义为:
33、
34、对上面的开环状态动力学方程式进行重新组合,并写成时域形式:
35、
36、步骤(33):建立闭环反馈控制器k
37、定义输出反馈:
38、uc(s)=kyc(s)
39、式中:k=[ke,ka,kω,kδ]为一个2行8列的矩阵;ke,ka,kω,kδ为2行2列矩阵,分别表示俯仰方向和偏航方向上的控制参数;
40、步骤(34):构建闭环系统的状态反馈
41、将输出反馈转化成状态反馈,定义yc为系统的新的状态变量;首先对yc关于时间t求导,得到将其带入的方程中,得到:
42、
43、对开环系统状态方程进行整理后得到:
44、
45、将状态反馈控制器u=kyc带入上式中,得到闭环系统的状态方程,将干扰变量变成了性能变量,得到:
46、
47、步骤(35):求解闭环状态反馈控制器k
48、带入导弹的气动参数,运用matlab中的lmi工具箱,可以计算出h∞控制器系数矩阵为:
49、
50、本发明与现有技术相比,其显著优点在于:
51、(1)本发明的方法,与传统pid控制方法相比,具有控制精度高,收敛速度快的特点。
52、(2)本发明的方法,与传统的控制方法相比,可以应对系统的不确定性和各种变化,包括参数变化,外部干扰,系统耦合等,具有较强的适应性和鲁棒性。
技术特征:
1.基于鲁棒h∞理论的pgk制导弹箭控制方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的方法,其特征在于,所述步骤(1)具体包括如下步骤:
3.根据权利要求2所述的方法,其特征在于,步骤(2)具体包括如下步骤:
4.根据权利要求3所述的方法,其特征在于,所述步骤(3)具体包括如下步骤:
技术总结
本发明属于导航与制导领域,具体涉及一种基于鲁棒H∞理论的PGK制导弹箭控制方法。包括如下步骤:步骤(1)建立PGK制导弹箭的控制系统模型;步骤(2)设计PGK制导弹箭的自动驾驶仪,简化成鲁棒H∞标准型结构;步骤(3)利用鲁棒H∞理论,设计PGK制导弹箭自动驾驶仪的控制方法。本发明在设计弹箭自动驾驶仪俯仰和偏航通道上进行了混合控制,可以很好的抑制两个方向上不可忽略的耦合作用;通过对状态变量进行扩展,设计出了满足控制需求的控制器;本发明方法可以对制导弹箭自动驾驶仪的过载信号进行追踪,在弹箭制导控制方面具有广阔的前景。
技术研发人员:张雷,易文俊
受保护的技术使用者:南京理工大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!