计及不等式约束的机械臂自适应鲁棒有界控制方法
本发明涉及高精度机械臂伺服控制,主要涉及一种计及不等式约束的机械臂自适应鲁棒有界控制方法。
背景技术:
1、机械臂因其高效率而越来越多的被应用于各种场合,随着机器人技术的提高,对机器人机械臂的驱动控制系统也提出了越来越高的要求,人们期望机械臂在不同场景下都能够完成所需要的任务。但是,在实际应用中,通常难以获取准确的环境信息和精确的机械臂动力学模型,这对于机械臂控制的实现造成了巨大挑战。
2、针对高精度机械臂的运动控制问题,大量非线性控制方法相继被提出,但这些研究大多忽略了系统的不等式约束。控制系统完成控制的条件是机械臂当前转角与期望角的误差被控制在一个小范围内,受控系统是包含对状态误差限制的不等式约束系统。在大多现有的二自由度机械臂系统控制策略中,控制设计思想仍是通过调节控制参数迫使系统状态在局部满足不等式约束,进而保证机械臂满足工况要求。但随着机械臂应用场景的增加,系统不确定性影响更复杂,这种“局部满足”的设计方法实用性降低。因此,针对具有快速时变不确定性、强非线性、高耦合性的二自由度机械臂控制系统,亟需开展计及不等式约束的高精度、高性能控制策略研究。
技术实现思路
1、本发明的目的在于提供一种可综合处理二自由度机械臂系统的强非线性、高耦合性和复杂时变不确定性,实现系统稳定精度可控的自适应鲁棒有界控制方法。
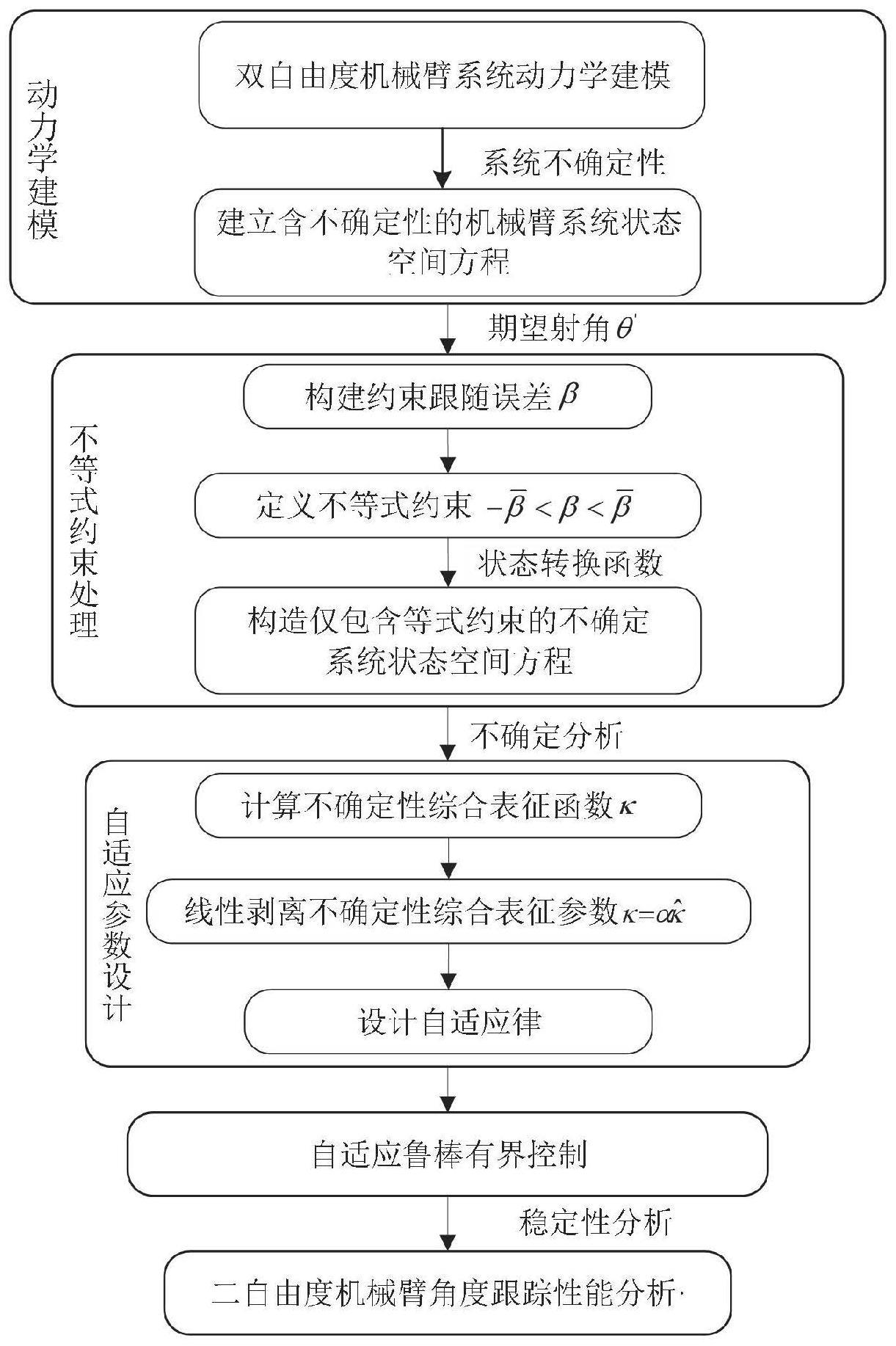
2、实现本发明目的技术解决方案为:计及不等式约束的机械臂自适应鲁棒有界控制方法,包括以下步骤:
3、步骤1,根据二自由度机械臂的动力学模型,考虑系统的不确定性,建立含不确定性的二自由度机械系统状态空间方程,转入步骤2。
4、步骤2,根据二自由度机械系统期望,构建二自由度机械系统的约束跟随误差,得到仅含等式约束的不确定系统状态空间方程:
5、依据二自由度机械系统稳定精度的期望性能,将二自由度机械系统的不等式约束综合表征为约束跟随误差的不等式约束;并选择状态转换函数,对含不确定性的二自由度机械系统状态空间方程进行重构,得到仅含等式约束的不确定系统状态空间方程,转入步骤3。
6、步骤3,分析仅含等式约束的不确定系统状态空间方程中不确定性的边界条件,选择设计函数ξw(·)、李雅普诺夫函数v(·)和标称项函数进而得到综合不确定表征函数κ(·)、线性剥离自适应参数α,建立自适应律在线估计自适应参数α,转入步骤4。
7、步骤4,计算标量选择控制设计参数ρ>0,依据ξw(·)、v(·)和自适应律设计二自由度机械臂的自适应鲁棒有界控制器,转入步骤5。
8、步骤5,运用李雅普诺夫稳定性理论进行稳定性证明。
9、本发明与现有技术相比,其显著优点是:
10、(1)考虑了不等式约束对控制器设计的影响,建立了更符合工程应用的二自由度机器臂动力学方程。
11、(2)采用自适应参数衡量系统不确定性影响,实现鲁棒增益自调节,不需要知道不确定性的详细信息,避免了参数选取的随机性和保守性。
12、(3)实现机械臂高精度角度跟踪控制,稳态误差的波动范围在2mrad内,使系统呈现稳态误差可控性能。
技术特征:
1.一种计及不等式约束的机械臂自适应鲁棒有界控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的计及不等式约束的机械臂自适应鲁棒有界控制方法,其特征在于,步骤1中,根据二自由度机械臂的动力学模型,考虑系统的不确定性,建立含不确定性的二自由度机械系统状态空间方程,具体如下:
3.根据权利要求2所述的计及不等式约束的机械臂自适应鲁棒有界控制方法,其特征在于,步骤2,根据二自由度机械系统期望,构建二自由度机械系统约束跟随误差,得到仅含等式约束的不确定系统状态空间方程,具体如下:
4.根据权利要求3所述的计及不等式约束的机械臂自适应鲁棒有界控制方法,其特征在于,步骤3中,分析仅含等式约束的不确定系统状态空间方程中不确定性的边界条件,选择设计函数ξw(·)、李雅普诺夫函数v(·)和标称项函数进而得到综合不确定表征函数κ(·)、线性剥离自适应参数α,建立自适应律在线估计自适应参数α,具体如下:
5.根据权利要求4所述的计及不等式约束的机械臂自适应鲁棒有界控制方法,其特征在于,步骤4中,计算标量选择控制设计参数ρ>0,依据ξw(·)、李雅普诺夫函数v(·)和自适应律设计二自由度机械臂的自适应鲁棒有界控制器,具体如下:
6.根据权利要求5所述的计及不等式约束的机械臂自适应鲁棒有界控制方法,其特征在于,步骤5中,运用李雅普诺夫稳定性理论进行稳定性证明,具体如下:
技术总结
本发明公开了一种计及不等式约束的机械臂自适应鲁棒有界控制方法,对不确定性机械系统动力学建模并处理不等式约束。本发明考虑机械臂的动力学特性及系统所受不确定性干扰,建立含不确定性的二自由度机械臂系统状态空间方程;构建系统稳态误差的不等式约束,通过转换受限状态奠定后续系统控制设计;采用不确定性综合表征函数和自适应参数量化不确定性边界,完成自适应鲁棒有界控制设计。本控制方法考虑了不等式约束对控制器设计的影响,能实现机械臂高精度角度跟踪控制。
技术研发人员:王宗范,王嗣沅
受保护的技术使用者:南京理工大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!