一种物流车的自动驾驶控制方法、装置、设备及存储介质与流程
本发明涉及车辆控制,具体涉及一种物流车的自动驾驶控制方法、装置、设备及存储介质。
背景技术:
1、随着自动驾驶技术的不断成熟和完善,物流配送朝着自动化、无人化方向快速发展,基于自动驾驶技术的配送物流车应运而生。现有的物流配送车技术方案主要是面向园区室外场景,根据需要在园区内设置站点,规划运行路线,进而完成配送任务。或者仅是面向园区室内场景,根据室内不同楼层、房间的配送需求,规划运行路线,从而完成配送任务。
2、现有物流车的运营场景不能同时覆盖室内和室外,面向园区室外运营的物流配送车只能在园区室外站点进行运营配送,无法进入到室内,用户收取快递或物料仍然需要走出室外;面向园区室内运营的物流配送车只能在室内运营配送,快递或物料需要先从园区入口运进室内后,再由物流车进行配送,配送效率较低。
3、当物流车在宽度较小、转弯曲率较大的走廊或电梯口等狭窄空间行驶时,现有的物流配送车由于自身体积相对于周围空间较大,可能偏离参考轨迹、发生碰撞,或可行驶区域较小,物流车无法脱困,导致配送任务失败。
技术实现思路
1、因此,本发明要解决的技术问题在于克服现有技术中物流车运营场景不能同时覆盖多种场景的问题,从而提供一种物流车的自动驾驶控制方法、装置、设备及存储介质。
2、为达到上述目的,本发明提供如下技术方案:
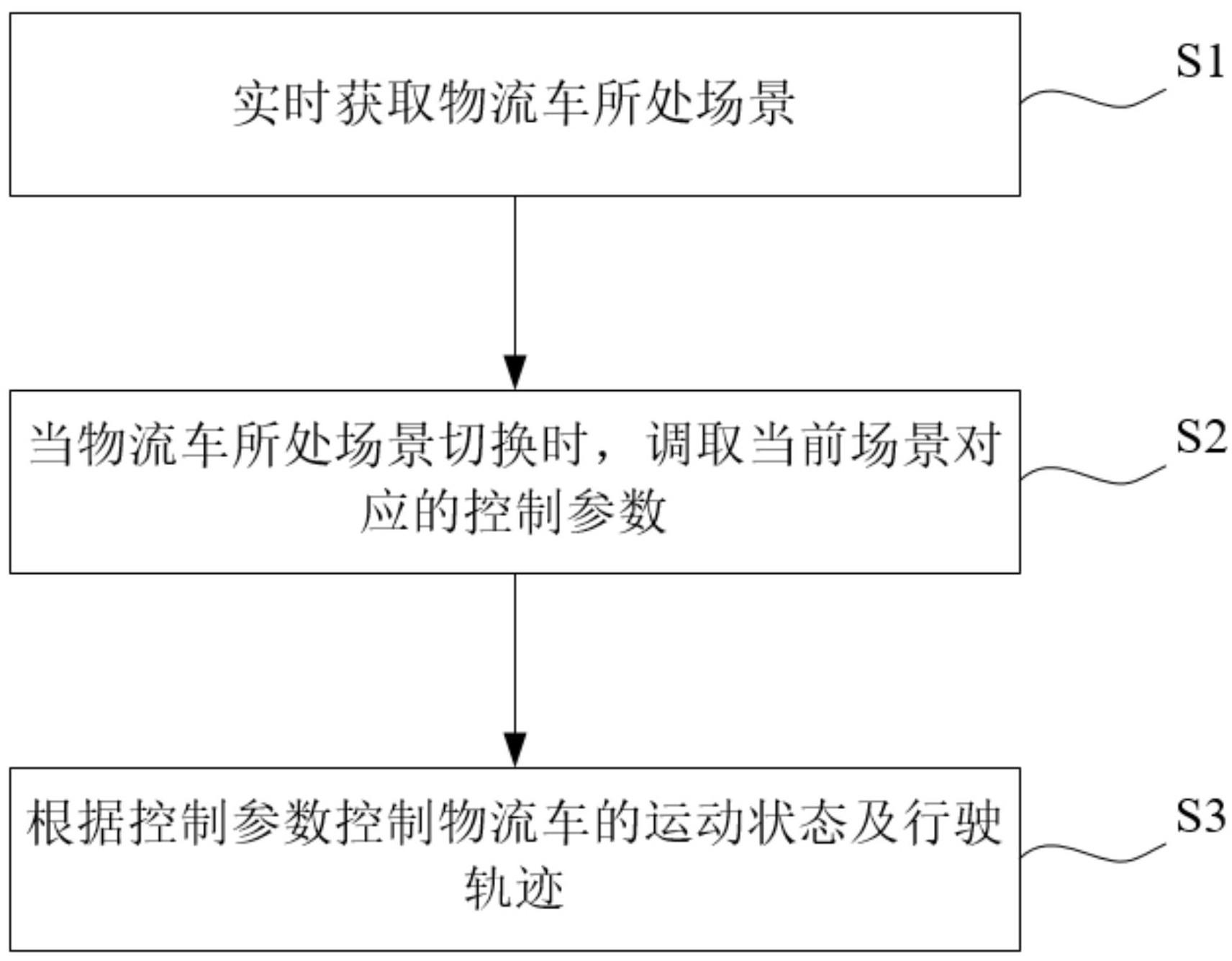
3、第一方面,本发明提供一种物流车的自动驾驶控制方法,包括:实时获取物流车所处场景;当物流车所处场景切换时,调取当前场景对应的控制参数;根据控制参数控制物流车的运动状态及行驶轨迹。
4、本发明提供的物流车的自动驾驶控制方法,可以根据物流车所处的不同场景调取该场景对应的控制参数,增加物流车的运营范围,使物流车能够针对不同的路况对应改变行驶状态,覆盖多种场景,方便收件人足不出户就可以收取物料和快递。
5、在一种可选的实施方式中,场景包括室内场景、室外场景、窄道场景、电梯场景及弯道场景。
6、本发明提供的物流车的自动驾驶控制方法,解决了现有配送物流车运营覆盖场景较少的问题,物流配送车能够同时在室内、室外、窄道、电梯、弯道等多种场景运营配送,室内人员可以足不出户收取快递物料。
7、在一种可选的实施方式中,根据控制参数控制物流车的运动状态及行驶轨迹的过程,包括:当切换至室内场景时,控制室内门或者电梯门开门。
8、本发明提供的物流车的自动驾驶控制方法,物流车可以直接通过远程控制开启楼门或电梯门,避免室外场景与室内场景切换时行驶路径上的门阻碍配送工作,无需人员手动开启可直接对门进行控制,提高了配送效率。
9、在一种可选的实施方式中,根据控制参数控制物流车的运动状态及行驶轨迹的过程,还包括:当切换至窄道场景或弯道场景时,实时监测物流车是否进入窄道场景或弯道场景;当物流车进入窄道场景或弯道场景时,从全局地图中获取物流车所处位置处的道路曲率及位置信息;基于道路曲率、物流车的运动状态及位置信息,判断物流车的横向误差是否超出阈值;当超出阈值时,对物流车的横向控制进行修正。
10、本发明提供的物流车的自动驾驶控制方法,当物流车进入窄道场景或弯道场景时,通过修正算法对物流车的横向控制进行修正,避免物流车在狭窄空间中运行时由于可行驶区域较小造成的偏离参考轨迹、碰撞、无法脱困问题,优化了对物流车的横向控制。
11、在一种可选的实施方式中,修正过程包括:以物流车当前行驶角速度为中心,以角速度增量为步长,在角速度限制区间中进行插值,获得多个角速度采样值;基于物流车当前线速度及多个角速度采样值,根据物流车的运动学模型分别计算每个角速度采样值对应的预估轨迹;基于当前场景的参考轨迹,计算预估轨迹的代价集合,将代价集合中最小代价对应的角速度采样值增量作为第一横向控制修正量;基于横向控制修正训练模型,将物流车横向误差、车速信息及道路曲率输入横向控制修正训练模型后,得到第二横向控制修正量;利用加权法,利用第一横向控制修正量及第二横向控制修正量,得到最终横向控制修正量,根据最终横向控制修正量修正物流车的横向控制。
12、本发明提供的物流车的自动驾驶控制方法,通过横向控制修正算法优化物流车的横向控制,并将每次修正时使用的横向误差、车速信息、道路曲率以及最终修正量作为样本重新传回给横向控制修正训练模型,对整个修正模型进行训练,不断优化模型,提高模型输出的准确度。
13、在一种可选的实施方式中,自动驾驶控制方法还包括:当物流车处于自动驾驶模式且未到达目标点时,判断物流车是否行驶到全局地图中的预设调头标志位处;当物流车行驶到预设调头标志位处时,根据预设调头标志位对应的控制参数控制物流车原地调头;当物流车未行驶到预设调头标志位处时,判断是否有参考轨迹及物流车当前位置信息;若有参考轨迹及物流车当前位置信息,则判断物流车是否行驶到全局地图中的预设后退标志位处;当物流车行驶到预设后退标志位处时,根据预设后退标志位对应的控制参数控制物流车后退行驶。
14、本发明提供的物流车的自动驾驶控制方法,当面对电梯口或宽度较小的走廊等狭窄的运营空间时,可以通过控制物流车原地调头或后退行驶离开狭窄空间,使物流车在该区域顺利通行,降低了物流车被困的风险,增大了物流车的运营范围。
15、在一种可选的实施方式中,自动驾驶控制方法还包括:当没有参考轨迹及物流车当前位置信息时,将物流车车速置零。
16、本发明提供的物流车的自动驾驶控制方法,当物流车无法识别参考轨迹或无法获取物流车当前位置信息时,物流车原地停止行驶,避免因失去定位信息或没有参考路径而发生误动。
17、在一种可选的实施方式中,自动驾驶控制方法还包括:当接收到新的配送任务时,根据物流车当前所处场景调取该场景对应的控制参数,并依据上述任意一种可选实施方式的控制方法控制物流车的运动状态及行驶轨迹。
18、第二方面,本发明提供一种物流车的自动驾驶控制装置,包括:获取模块,用于实时获取物流车所处场景;参数调取模块,用于当物流车所处场景切换时,调取当前场景对应的控制参数;控制模块,用于根据控制参数控制物流车的运动状态及行驶轨迹。
19、第三方面,本发明提供一种计算机设备,包括:存储器和处理器,存储器和处理器之间互相通信连接,存储器中存储有计算机指令,处理器通过执行计算机指令,从而执行上述第一方面或其对应的任一实施方式的物流车的自动驾驶控制方法。
20、第四方面,本发明提供一种计算机可读存储介质,计算机可读存储介质上存储有计算机指令,计算机指令用于使计算机执行上述第一方面或其对应的任一实施方式的物流车的自动驾驶控制方法。
技术特征:
1.一种物流车的自动驾驶控制方法,其特征在于,包括:
2.根据权利要求1所述的物流车的自动驾驶控制方法,其特征在于,
3.根据权利要求2所述的物流车的自动驾驶控制方法,其特征在于,所述根据所述控制参数控制所述物流车的运动状态及行驶轨迹的过程,包括:
4.根据权利要求2所述的物流车的自动驾驶控制方法,其特征在于,所述根据所述控制参数控制所述物流车的运动状态及行驶轨迹的过程,还包括:
5.根据权利要求4所述的物流车的自动驾驶控制方法,其特征在于,所述修正过程包括:
6.根据权利要求1至5任一项所述的物流车的自动驾驶控制方法,其特征在于,还包括:
7.根据权利要求6所述的物流车的自动驾驶控制方法,其特征在于,还包括:
8.根据权利要求1所述的物流车的自动驾驶控制方法,其特征在于,还包括:
9.一种物流车的自动驾驶控制装置,其特征在于,包括:
10.一种计算机设备,其特征在于,包括:
11.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机指令,所述计算机指令用于使计算机执行权利要求1至5中任一项所述的物流车的自动驾驶控制方法。
技术总结
本发明涉及车辆控制技术领域,公开了一种物流车的自动驾驶控制方法、装置、设备及存储介质,方法包括:实时获取物流车所处场景;当物流车所处场景切换时,调取当前场景对应的控制参数;根据控制参数控制物流车的运动状态及行驶轨迹。本发明的物流车可以同时覆盖室内、室外、窄道、电梯等多种场景,可以在狭窄空间内顺利通行,避免被困的风险,同时能够使收件人足不出户即可收取物料或快递,提高了配送效率。
技术研发人员:张玉峰,徐月云,高嵩,王鹤,张庆,李瑞,陈云鑫
受保护的技术使用者:国汽(北京)智能网联汽车研究院有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!