网络化严格反馈非线性系统动态事件触发控制方法和应用
本发明属于网络化控制领域,尤其是网络化严格反馈非线性系统动态事件触发控制方法和应用。
背景技术:
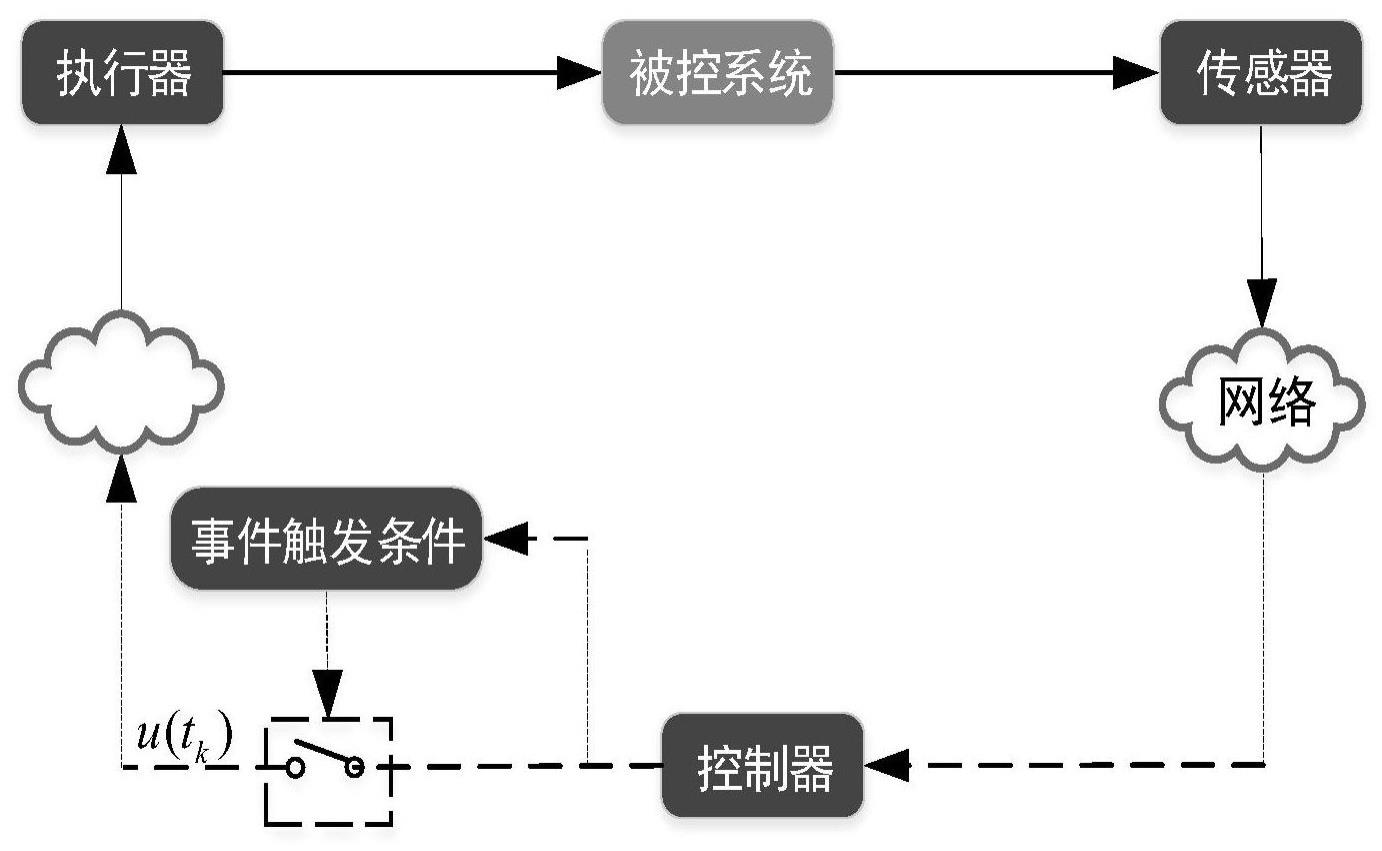
1、大部分实际物理系统,如机器人系统、无人艇系统、车辆系统以及航空航天系统,都包含非线性、强耦合、不确定和随机性等综合特性,这些物理系统用线性系统模型是不能精确描述的,需要用非线性系统模型进行描述。从控制的发展历程来看,随着网络通信技术的快速发展,在控制系统中引入网络,从而使系统中的传感器、控制器和执行器等组件能够通过网络来传输信号,避免了点对点布线实现传输信号,这种通过网络将控制系统中的各个组件连接而形成的控制系统称之为网络化控制系统。网络的引入也给控制系统的分析和设计带来了很多困难,由于网络带宽是有限的,当有大量的信号需要通过网络传输时,便可能会出现网络拥塞、数据碰撞等情况,从而影响控制系统的运行性能。
2、为了减少网络中传输的数据信号,研究者提出了事件触发控制方式,与传统的周期采样不同,事件触发控制根据系统性能需求设计触发条件来判断是否进行数据的传输和控制信号的更新。与静态事件触发方式相比,动态事件触发通过在触发机制中引入动态变量的方式设计触发阈值,更能减少网络中传输的数据量和降低执行器更新的频率。
3、现有的动态事件触发控制方法主要应用于线性系统或者一类相对简单的非线性系统,对于目前已有的非线性系统动态事件触发控制方法,其关键的要求是在状态空间表示中,未知的非线性函数出现在与控制输入相同的方程上,这种对未知的非线性函数要求通常称为匹配条件。然而很多物理系统的未知非线性函数都不满足匹配条件,如机器人系统、无人艇系统、车辆系统以及航空航天系统等,这类不满足匹配条件的非线性系统被称为严格反馈非线性系统。这给动态事件触发控制设计带来了很大的困难,现有的动态事件触发控制方法尚未很好地解决严格反馈非线性系统的跟踪问题。
技术实现思路
1、针对上述现有技术存在的不足,提供了网络化严格反馈非线性系统动态事件触发控制方法和应用,使得系统的输出跟踪期望信号,在保证系统控制性能的同时更加节省网络通讯资源;并且避免过参数化问题,减少执行器的动作次数和网络中传输的事件数量。
2、为解决上述技术问题,本发明所采取的技术方案是,网络化严格反馈非线性系统动态事件触发控制方法,包括如下步骤:
3、(1)、构建网络化严格反馈非线性系统:
4、
5、其中,表示系统的状态向量,u∈r是控制输入,y∈r是系统输出,rn→rr和ri→r1是已知的非线性函数,θ∈rr是系统的未知参数向量;
6、(2)、为了设计动态事件触发控制方法,首先设定如下的坐标变换:
7、
8、式中,r是期望信号,z1是系统的跟踪误差,zi为虚拟跟踪误差,αi-1是虚拟控制律;
9、(3)、基于自适应反步法和调节函数技术,设计系统的虚拟控制律:
10、
11、
12、式中,ci(i=1,...,n)是正的设计参数,表示θ的估计值,表示估计误差,γ∈rr×r为正定对称矩阵;
13、(4)、构建动态事件触发自适应控制器和参数自适应律:
14、w(t)=αn+r(n)
15、
16、式中,σ是正的设计参数;
17、(5)、构建动态事件触发机制:
18、
19、
20、式中,e(t)=w(t)-u(t)表示动态事件触发引起的测量误差,a和b均是正的设计参数,ζ表示动态阈值参数;
21、通过在事件触发机制中引入动态阈值参数,进而构建动态事件触发自适应控制器,所述动态事件触发自适应控制器到执行器的信号符合动态触发机制时传输。
22、上述的网络化严格反馈非线性系统动态事件触发控制方法,所述步骤(4)中,所述动态阈值参数由下面的动态方程产生:
23、
24、式中,ρ是正的设计参数,动态阈值参数满足
25、上述的网络化严格反馈非线性系统动态事件触发控制方法,所述步骤(3)中,所述调节函数为:
26、
27、网络化严格反馈非线性系统动态事件触发控制方法的应用,应用于实际物理系统,尤其是机器人系统、无人艇系统、车辆系统以及航空航天系统。
28、本发明网络化严格反馈非线性系统动态事件触发控制方法和应用的有益效果是,
29、1、本方法通过在事件触发机制中引入动态阈值参数,进而构建动态事件触发控制器,当控制器到执行器的信号符合动态触发机制时才传输,相比于已有的静态事件触发机制,更加节省了控制器到执行器网络通道传输的事件数量。
30、2、本方法针对更为一般的严格反馈非线性系统,基于自适应反步法和调节函数技术,避免了参数自适应过程中的过参数化问题,通过引入动态事件触发机制,更加高效的利用网络传输的资源,避免了芝诺行为的出现。基于李雅普诺夫稳定性理论,证明了闭环系统的稳定性,实现了对期望信号的跟踪控制。
31、3、自适应反步法作为一种递归设计方法,不仅可以解决非线性系统不满足匹配条件所带来的困难,而且可以使控制器设计过程系统化、结构化。本发明所提出的网络化严格反馈非线性系统动态事件触发控制方法,将自适应反步法与动态事件触发控制相结合,既能解决不满足匹配条件的网络化非线性系统的跟踪问题,又能保证系统的稳定性。
技术特征:
1.网络化严格反馈非线性系统动态事件触发控制方法,其特征在于:
2.根据权利要求1所述的网络化严格反馈非线性系统动态事件触发控制方法,其特征是,所述步骤(4)中,所述动态阈值参数由下面的动态方程产生:
3.根据权利要求2所述的网络化严格反馈非线性系统动态事件触发控制方法,其特征是,所述步骤(3)中,所述调节函数为:
4.网络化严格反馈非线性系统动态事件触发控制方法的应用,其特征在于:应用于实际物理系统,尤其是机器人系统、无人艇系统、车辆系统以及航空航天系统。
技术总结
本发明属于网络化控制领域,尤其是网络化严格反馈非线性系统动态事件触发控制方法和应用,通过在事件触发机制中引入动态阈值参数,进而构建动态事件触发控制器,当控制器到执行器的信号符合动态触发机制时才传输,相比于已有的静态事件触发机制,更加节省控制器到执行器网络通道传输的事件数量;基于自适应反步法和调节函数技术,避免了参数自适应过程中的过参数化问题,通过引入动态事件触发机制,更加高效的利用网络传输的资源,避免了芝诺行为的出现;将自适应反步法与动态事件触发控制相结合,既能解决不满足匹配条件的网络化非线性系统的跟踪问题,又能保证系统的稳定性。
技术研发人员:刘永超,安雅鑫
受保护的技术使用者:青岛大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!