车辆远程控制方法、装置、系统和车辆与流程
本发明涉及车辆控制,尤其涉及一种车辆远程控制方法、装置、系统和车辆。
背景技术:
1、目前,工程车辆的远程系统可对工程车辆进行远程控制,远程控制包括对驾驶动作的远程控制,将方向盘、制动及离合等控制机构与车辆分离,并通过终端远程遥控驾驶车辆,例如在监控系统的辅助下,通过终端控制车辆的前进、后退、转弯等。
2、但是,这种对驾驶动作的远程控制,车辆的控制主体仍是人,需要人工实时对车辆进行控制,并没有涉及无人驾驶相关的技术应用,人工成本较高,且对网络的实时性要求也比较高。
技术实现思路
1、本发明提供一种车辆远程控制方法、装置、系统和车辆,用以解决现有技术中工程车辆的远程系统需要人工实时对车辆进行控制的缺陷,通过远程控制指令与整车控制器控制下的无人驾驶技术的结合,实现对车辆的远程控制以及车辆自身的无人驾驶,避免了人工对车辆进行远程实时控制的高成本和高实时性网络要求。
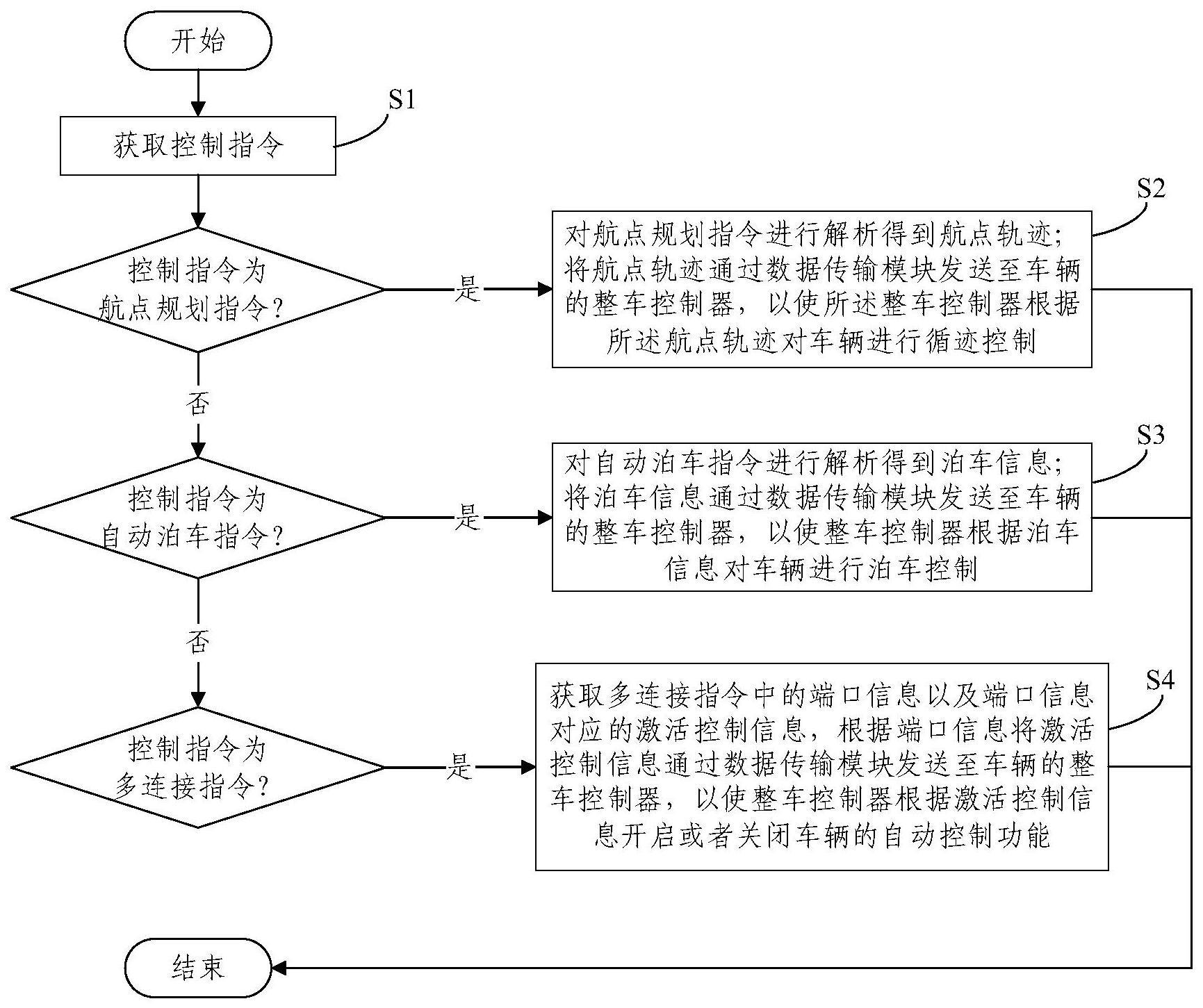
2、本发明提供一种车辆远程控制方法,包括:获取控制指令;
3、在所述控制指令为航点规划指令的情况下,对所述航点规划指令进行解析得到航点轨迹,所述航点规划指令中包括预先设置的多个航点;将所述航点轨迹通过数据传输模块发送至车辆的整车控制器,以使所述整车控制器根据所述航点轨迹对车辆进行循迹控制。
4、根据本发明提供一种的车辆远程控制方法,对所述航点规划指令进行解析得到航点轨迹,包括:
5、计算两个所述航点之间的距离;
6、根据预设的循迹需求周期、两个所述航点之间的距离以及车速,计算得到循迹点的数量;基于两个所述航点之间的距离和所述循迹点的数量,分配所述循迹点的坐标;根据预设的循迹需求周期和所述循迹点的数量,设定每个所述循迹点的相对时间。
7、基于所述循迹点的数量、坐标、相对时间以及所述航点的坐标生成航点轨迹。
8、根据本发明提供的一种车辆远程控制方法,计算两个所述航点之间的距离,包括:
9、将所述航点所属的wgs84坐标系转化为utm坐标系;
10、基于两个所述航点在所述utm坐标系下坐标计算距离;所述航点中包括wgs84坐标系下的经度、纬度、高度和车速的属性信息;所述循迹点中包括utm坐标系下的坐标、速度、加速度、曲率、曲率变化率、时间戳和相对时间的属性信息;
11、根据本发明提供一种的车辆远程控制方法,在获取控制指令之后,还包括:
12、在所述控制指令为自动泊车指令的情况下,对所述自动泊车指令进行解析得到泊车信息;
13、将所述泊车信息通过数据传输模块发送至所述整车控制器,以使所述整车控制器根据所述泊车信息对车辆进行泊车控制。
14、根据本发明提供一种的车辆远程控制方法,在获取控制指令之后,对所述控制指令进行解析之前,还包括:
15、获取车辆的自动控制功能的状态,在自动控制功能为激活状态的情况下,拒绝所述控制指令,流程结束。
16、根据本发明提供一种的车辆远程控制方法,在获取控制指令之后,还包括:
17、在所述控制指令为多连接指令的情况下,获取所述多连接指令中的所有端口信息以及所述端口信息对应的自动控制开关指令,根据所述端口信息将所述自动控制开关指令通过与所述端口信息对应的数据传输模块发送至所述整车控制器,以使所述整车控制器根据所述自动控制开关指令开启或者关闭车辆的自动控制功能。
18、根据本发明提供一种的车辆远程控制方法,在获取所述多连接指令中的所有端口信息以及所述端口信息对应的自动控制开关指令之后,根据所述端口信息将所述自动控制开关指令通过与所述端口信息对应的数据传输模块发送至所述整车控制器之前,还包括:
19、在所述多连接指令中的存在至少两个所述端口信息和至少两个用于指示开启车辆的自动控制功能的所述自动控制开关指令的情况下,拒绝所述多连接指令,流程结束。
20、本发明还提供一种车辆远程控制装置,包括:指令获取模块,用于获取控制指令;
21、指令解析模块,用于在所述控制指令为航点规划指令的情况下,对所述航点规划指令进行解析得到航点轨迹,所述航点规划指令中包括预先设置的多个航点;
22、指令发送模块,用于将所述航点轨迹通过数据传输模块发送至车辆的整车控制器,以使所述整车控制器根据所述航点轨迹对车辆进行循迹控制。
23、本发明还提供一种车辆远程控制系统,包括上位机、数据传输模块和整车控制器;
24、所述上位机用于获取控制指令,在所述控制指令为航点规划指令的情况下,对所述航点规划指令进行解析得到航点轨迹,所述航点规划指令中包括预先设置的多个航点;将所述航点轨迹发送至所述数据传输模块;
25、所述数据传输模块用于获取所述上位机发送的所述航点轨迹,以及将所述航点轨迹发送至所述整车控制器;
26、所述整车控制器用于获取所述航点轨迹,并根据所述航点轨迹对车辆进行循迹控制。
27、本发明还提供一种车辆,包括上述的任一种数据传输模块和整车控制器。
28、本发明提供的一种车辆远程控制方法、装置、系统和车辆,通过获取控制指令,在控制指令为航点规划指令的情况下,对航点规划指令进行解析得到航点轨迹,航点规划指令中包括预先设置的多个航点;将航点轨迹通过数据传输模块发送至车辆的整车控制器,以使整车控制器根据航点轨迹对车辆进行循迹控制,实现无人驾驶,通过远程控制指令与整车控制器控制下的无人驾驶技术的结合,实现了对车辆的远程控制以及车辆自身的无人驾驶,车辆的整车控制器能够根据获得的控制指令对车辆进行自动驾驶控制,避免了人工对车辆进行远程实时控制的高成本和高实时性网络要求,降低了人工成本和网络通信成本。
技术特征:
1.一种车辆远程控制方法,其特征在于,包括:
2.根据权利要求1所述的车辆远程控制方法,其特征在于,对所述航点规划指令进行解析得到航点轨迹,包括:
3.根据权利要求2所述的车辆远程控制方法,其特征在于,计算两个所述航点之间的距离,包括:
4.根据权利要求1所述的车辆远程控制方法,其特征在于,在获取控制指令之后,还包括:
5.根据权利要求1-4任一项所述的车辆远程控制方法,其特征在于,在获取控制指令之后,对所述控制指令进行解析之前,还包括:
6.根据权利要求1-4任一项所述的车辆远程控制方法,其特征在于,在获取控制指令之后,还包括:
7.根据权利要求6所述的车辆远程控制方法,其特征在于,在获取所述多连接指令中的所有端口信息以及所述端口信息对应的自动控制开关指令之后,根据所述端口信息将所述自动控制开关指令通过与所述端口信息对应的数据传输模块发送至所述整车控制器之前,还包括:
8.一种车辆远程控制装置,其特征在于,包括:
9.一种车辆远程控制系统,其特征在于,包括上位机、数据传输模块和整车控制器;
10.一种车辆,其特征在于,所述车辆包括如权利要求9所述的整车控制器和数据传输模块。
技术总结
本发明涉及车辆控制技术领域,提供一种车辆远程控制方法、装置、系统和车辆,通过获取控制指令,解析航点规划指令或者自动泊车指令得到航点轨迹或者泊车信息,并通过数据传输模块发送至整车控制器,使整车控制器根据航点轨迹或者泊车信息对车辆进行控制;根据多连接指令中的端口信息和自动控制开关指令,将自动控制开关指令通过对应的数据传输模块发送至整车控制器,对车辆的自动控制功能进行开启或关闭,实现对多台车辆的控制;该方法通过远程控制指令与整车控制器控制下的无人驾驶技术的结合,实现对车辆的远程控制以及车辆自身的无人驾驶,避免了人工对车辆进行远程实时控制的高成本和高实时性网络要求,降低了人工和网络通信成本。
技术研发人员:刘建斌,魏长河,贾成禹
受保护的技术使用者:三一汽车制造有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!