基于神经网络调节参数的阻尼自适应阻抗控制方法
本发明涉及电机控制与机器人,具体涉及一种基于神经网络调节参数的阻尼自适应阻抗控制方法。
背景技术:
1、随着电子信息技术的发展,机器人被广泛用于各种重复性高的作业场景,如基于力控制的机器人打磨,其具有高效性、高精度、稳定性好、安全性高等特点。对于机器人的力控制,普遍采用阻抗控制方法,阻抗控制将机器人末端与环境之间的力与位置联系起来,通过末端的作用力反馈调整末端位置实现力的控制。然而,传统的阻抗控制在刚度固定的平面环境下效果显著,但对于刚度变化和环境位置未知的情况效果不理想。
2、为了能够让阻抗控制能够适应复杂未知的环境,国内外学者一直致力于阻抗控制的改进研究。有文献考虑到机器人末端位移的误差对力的影响,基于模型自适应的方法补偿末端位置,从而实时调整末端位置以实现恒力的控制,但它需要调整的参数过多,参数的选取是否合适对于系统的影响很大。有文献引入自适应模糊滑模控制器补偿时间延时估计产生的估计误差,抵消动力学模型中的非线性因子和不确定因素对系统的干扰。有文献提出了一种基于动态神经网络的自适应阻抗控制方法,用于多物理约束下的冗余机器人,为了在环境模型未知的情况下提供最佳接触性能,提出了一种自适应阻抗学习方法,以实现机器人与环境之间的最佳交互。有文献基于阻抗控制方法,设计了一种模型预测控制器,利用q学习方法对于模型预测控制器求解,然后在线优化阻抗参数。有文献提出一种改进型自抗扰阻抗控制策略。该策略通过自抗扰控制器生成新期望力,调整机器人末端工具坐标系的位置,实现精确的力跟踪。虽然上述文献从参考位置误差、时间延时产生的误差、阻抗参数不合适、期望力误差等方面对传统阻抗控制方法进行改进,实现了对力的控制,但是设计的方法在控制系统的动态性能上有待进一步提高。
技术实现思路
1、本发明所要解决的是工业机器人在打磨过程中环境刚度和位置未知,传统的阻抗控制难以有效保持打磨质量的问题,提供一种基于神经网络调节参数的阻尼自适应阻抗控制方法。
2、为解决上述问题,本发明是通过以下技术方案实现的:
3、基于神经网络调节参数的阻尼自适应阻抗控制方法,包括步骤如下:
4、步骤1、初始化:令第1时刻的接触力误差δf(1)=0,第2时刻的接触力误差δf(2)=0;令第1时刻的参考轨迹的修正量ex(1)=0,第2时刻的参考轨迹的修正量ex(2)=0;令第1时刻的阻尼的补偿量δb(1)=0,第2时刻的阻尼的补偿量δb(2)=0;令k=3;
5、步骤2、通过机器人末端传感器采集k时刻的实际接触力fe(k),并结合k时刻的期望接触力fd(k)得到k时刻的接触力的误差δf(k),其中:
6、δf(k)=fd(k)-fe(k)
7、步骤3、计算k时刻的参考轨迹的修正量ex(k),其中:
8、
9、式中,δf(k)为k时刻的接触力误差,δf(k-1)为k-1时刻的接触力误差,δf(k-2)为k-2时刻的接触力误差;ex(k)为k时刻的参考轨迹的修正量,ex(k-1)为k-1时刻的参考轨迹的修正量,ex(k-2)为k-2时刻的参考轨迹的修正量;md、bd和kd分别为目标阻抗模型的惯性、阻尼和刚度;δb(k-1)为k-1时刻的阻尼的补偿量;t为传感器的采样周期;
10、步骤4、利用k时刻的参考轨迹的修正量ex(k)对k时刻的参考轨迹xd(k)进行补偿,得到k时刻的参考轨迹的控制量x(k),其中:
11、x(k)=xd(k)+ex(k)
12、步骤5、先利用k时刻的参考轨迹的控制量x(k)减去k-1时刻的参考轨迹的控制量x(k-1)得到k时刻的参考轨迹的控制量x(k)的增量δx(k);再利用k时刻的参考轨迹的控制量的增量δx(k)减去k-1时刻的参考轨迹的控制量x(k-1)得到k时刻的参考轨迹的控制量的增量δx(k)的增量
13、步骤6、将k时刻的参考轨迹的控制量x(k)的增量δx(k)和k时刻的参考轨迹的控制量的增量δx(k)的增量送入到神经网络中,得到k时刻的阻尼的补偿量δb(k);上述神经网络由输入层、中间层和输出层构成,其中间层的激励函数为:
14、
15、式中,f1、f2、f3和f4分别为中间层的4个激励函数;δx(i)为i时刻的参考轨迹的控制量x(i)的增量,δx(k)为k时刻的参考轨迹的控制量x(k)的增量;为i时刻的参考轨迹的控制量的增量δx(i)的增量,为k时刻的参考轨迹的控制量的增量δx(k)的增量;
16、步骤6、令k=k+1,并返回步骤2。
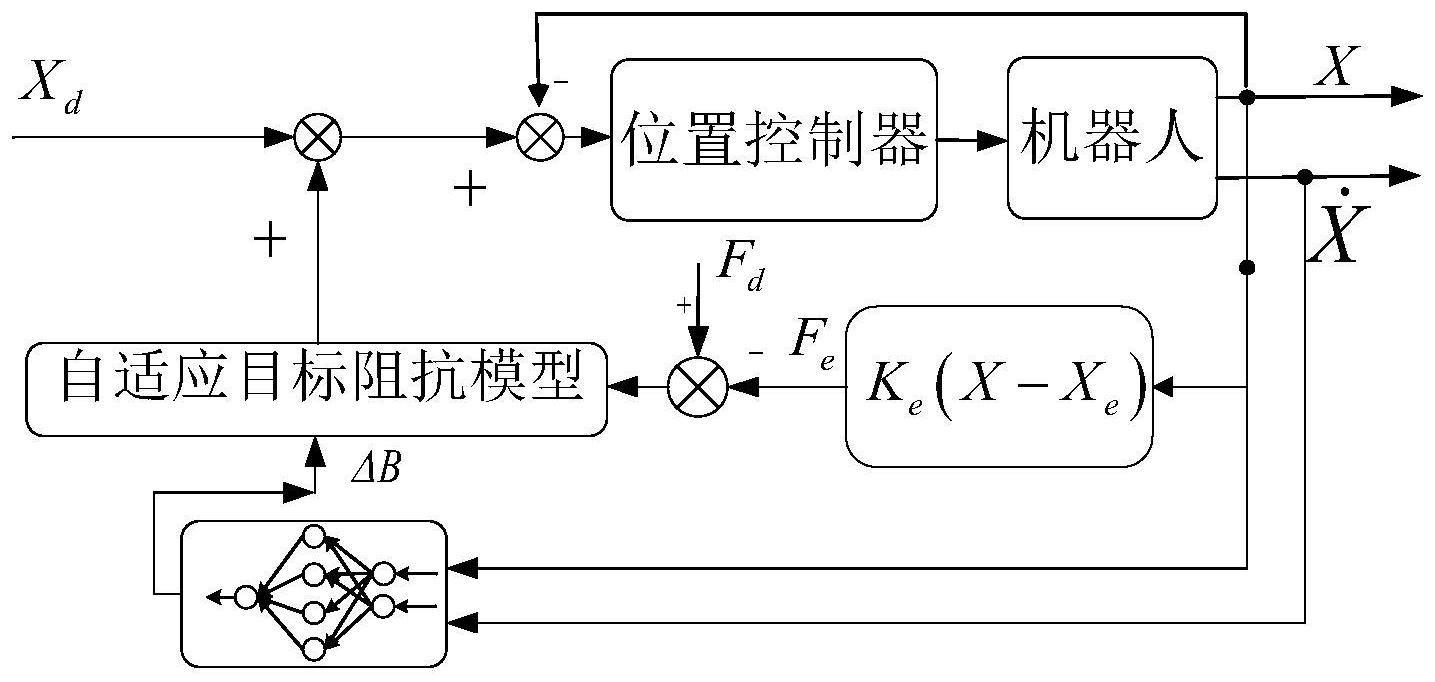
17、与现有技术相比,本发明在自适应阻抗控制的基础上,设计了基于神经网络调节参数的阻尼自适应阻抗控制算法,通过机器人末端力反馈信息,结合神经网络在线学习,实时最优阻尼参数,以适应复杂未知的接触环境,实现了打磨过程中力的有效控制。
技术特征:
1.基于神经网络调节参数的阻尼自适应阻抗控制方法,其特征是,包括步骤如下:
技术总结
本发明公开一种基于神经网络调节参数的阻尼自适应阻抗控制方法,基于李雅普诺夫稳定性理论设计得到阻尼补偿的数学描述,设计阻尼自适应阻尼控制器。根据阻尼自适应阻尼控制器数学模型的特殊结构,设计不同的激励函数用于反映阻尼系数在多种因素影响下变化的特征,构建神经网络,用于阻尼自适应阻尼控制器中阻尼调节参数的自适应调节。通过所构建的神经网络在线学习,实现阻尼自适应阻尼控制器中阻尼调节参数的优化,以适应打磨过程环境变化,实现阻尼控制适应于斜面、平面及曲面等不同环境下的刚度突变、刚度动态变化、期望力动态变化情况,在保证稳定的前提下,有效地提高了控制精度。
技术研发人员:党选举,李晓,袁以坤,原翰玫,黄品高,张斌,龙诗科
受保护的技术使用者:桂林电子科技大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!