一种复合故障下的集群无人机容错协同控制方法
本申请涉及无人机,尤其是一种复合故障下的集群无人机容错协同控制方法。
背景技术:
1、无人机由于成本低、部署灵活等特点,在森林火灾监测、搜救、电网巡检等众多领域得到了越来越广泛的应用,其中固定翼无人机因其具有承载能力强、飞行速度快、续航时间长等优点而在广域覆盖搜索、远距离物流运输、通信中继等得到广泛应用。
2、随着无人机自主技术的发展,多无人机协同控制已成为一个重要的研究方向。通过协同作战,多无人机表现出较高的任务执行效率、卓越的协调性、智能性和自主性。为保证多无人机系统在任务执行过程中的协同控制性能,飞行安全已成为飞行控制领域的研究热点。当多架无人机协同执行环境监测、火灾监测和协同搜索等任务时,如果一架或多架无人机遇到部件故障,则存在失控的风险。在严重的情况下,故障无人机可能与周围的无人机发生碰撞,导致整个飞行编队失去控制。因此,研究故障检测、故障估计和容错协同控制问题对于监控任务的安全进行和多无人机系统的安全控制具有重要的理论意义和现实必要性。
3、值得注意的是,随着工作时间的增加、环境的复杂性和严重程度的增加,执行器和传感器可能会出现磨损和老化。此外,在多无人机协同编队飞行中,整个系统中系统部件的数量显著增加。多无人机系统涉及通信网络连接,这使得故障无人机有机会将其错误状态信息发送给附近的无人机,大大增加了发生碰撞和任务失败的概率。与单架无人机的故障检测和容错控制相比,多架无人机的故障检测和容错控制越来越复杂。此外,无人机所遇到的外部干扰和系统的非线性也给多无人机的研究带来了很大的挑战和困难。如何检测受干扰影响的多无人机系统的各种故障,并对故障进行有效处理,已成为保证多无人机安全协同编队飞行的重要研究课题。
技术实现思路
1、本申请针对上述问题及技术需求,提出了一种复合故障下的集群无人机容错协同控制方法,本申请的技术方案如下:
2、一种复合故障下的集群无人机容错协同控制方法,该集群无人机容错协同控制方法包括:
3、建立集群无人机中任意第i架跟随者无人机在考虑风力扰动情况下的动力学模型,集群无人机包括一架领导者无人机及n架跟随领导者无人机进行编队飞行的跟随者无人机,整数参数1≤i≤n;
4、建立执行器故障模型和传感器故障模型,结合考虑风力扰动情况下的动力学模型,得到第i架跟随者无人机在复合故障下的故障动力学模型;
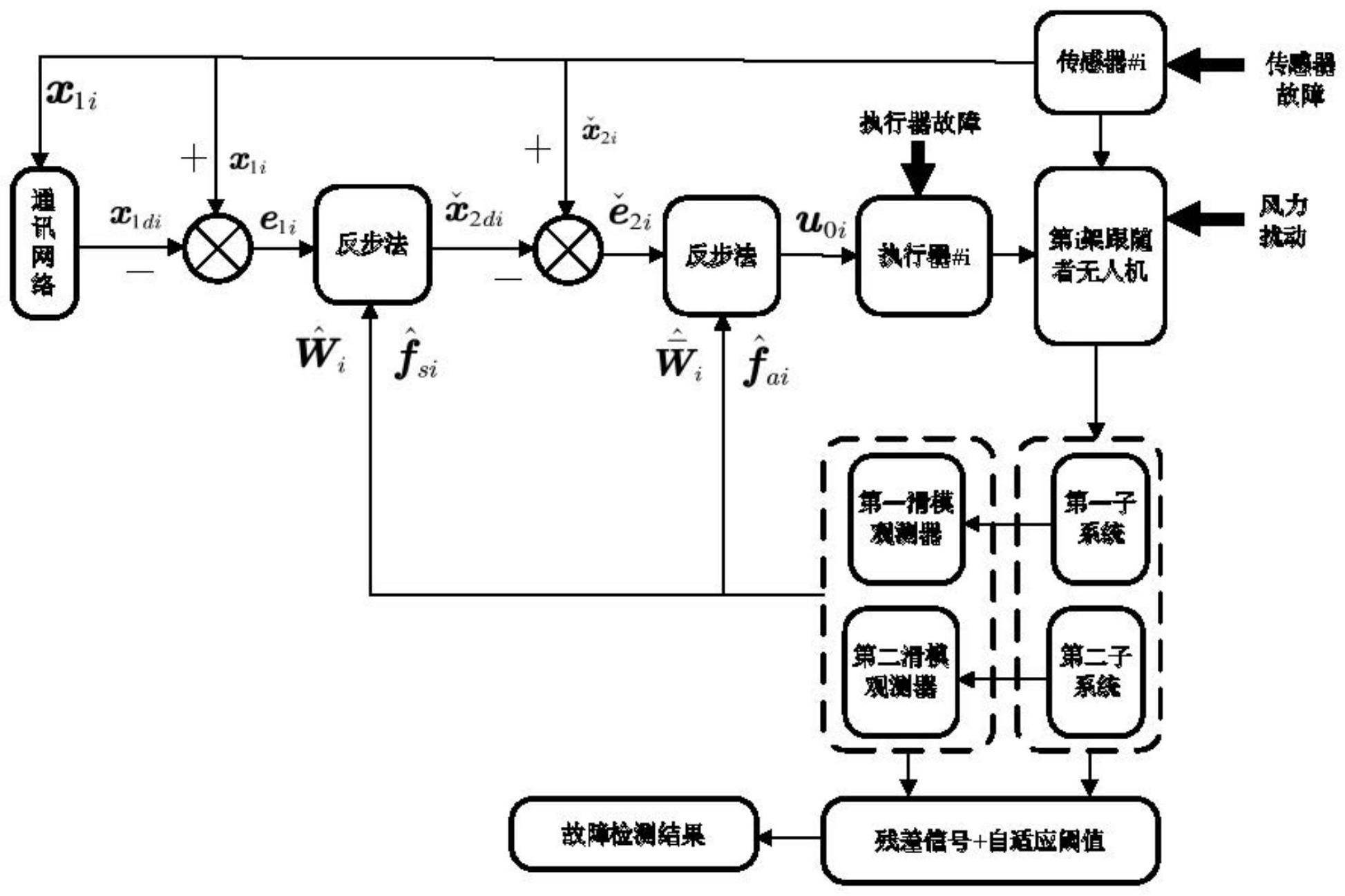
5、根据故障动力学模型结合广义位置误差e1i=x1i-x1di利用反步法设计得到传感器期望状态向量的表达式,根据故障动力学模型结合传感器故障跟踪误差利用反步法设计得到第i架跟随者无人机的容错控制律;其中,为传感器测量状态向量,x1i是第i架跟随者无人机的位置向量,x1di是根据集群无人机中其他跟随者无人机的位置向量所确定的第i架跟随者无人机的期望位置向量;
6、对第i架跟随者无人机的故障动力学模型进行线性化处理并建立滑模观测器,利用建立的滑模观测器对容错控制律中的风扰相关项和故障相关项进行估计并补偿后,按照容错控制律对第i架跟随者无人机进行容错控制。
7、本申请的有益技术效果是:
8、本申请公开了一种复合故障下的集群无人机容错协同控制方法,该方法考虑了集群无人机在存在风扰和遭遇复合故障情况下的故障检测与编队协同容错控制问题,所设计的故障检测方案确保了执行器和传感器故障的及时检测与估计补偿,引入滑模观测器,对故障相关项、扰动和无人机自身状态进行准确估计,采用的编队协同容错控制方案能够确保风扰和复合故障下集群无人机的稳定飞行,各无人机可以对期望位置进行编队跟踪,在集群无人机故障检测与协同容错控制上具有很好的实际意义和应用前景。
技术特征:
1.一种复合故障下的集群无人机容错协同控制方法,其特征在于,所述集群无人机容错协同控制方法包括:
2.根据权利要求1所述的集群无人机容错协同控制方法,其特征在于,所述得到所述第i架跟随者无人机在复合故障下的故障动力学模型包括:
3.根据权利要求2所述的集群无人机容错协同控制方法,其特征在于,所述利用反步法设计得到传感器期望状态向量的表达式包括:
4.根据权利要求3所述的集群无人机容错协同控制方法,其特征在于,所述利用反步法设计得到所述第i架跟随者无人机的容错控制律包括:
5.根据权利要求2所述的集群无人机容错协同控制方法,其特征在于,所述对所述第i架跟随者无人机的故障动力学模型进行线性化处理并建立滑模观测器包括:
6.根据权利要求5所述的集群无人机容错协同控制方法,其特征在于,所述引入状态和输出转换矩阵将所述线性化系统模型转换为两个子系统包括:
7.根据权利要求6所述的集群无人机容错协同控制方法,其特征在于,所述基于转换得到的两个子系统设计滑模观测器包括:
8.根据权利要求7所述的集群无人机容错协同控制方法,其特征在于,所述利用建立的滑模观测器对所述容错控制律中的风扰相关项和故障相关项进行估计并补偿包括:
9.根据权利要求7所述的集群无人机容错协同控制方法,其特征在于,所述集群无人机容错协同控制方法还包括:
10.根据权利要求9所述的集群无人机容错协同控制方法,其特征在于,所述根据自适应阈值的上界和对所述第i架跟随者无人机进行故障检测包括:
技术总结
本申请公开了一种复合故障下的集群无人机容错协同控制方法,涉及无人机技术领域,该方法结合执行器故障模型、传感器故障模型以及考虑风力扰动情况下的动力学模型,得到复合故障下的故障动力学模型,对故障动力学模型进行线性化处理以建立滑模观测器对风扰相关项、故障相关项以及无人机自身状态进行及时的检测以及估计补偿,基于故障动力学模型利用反步法进行容错协同控制设计,能够确保风扰和复合故障下集群无人机的稳定飞行,各无人机可以对期望位置进行编队跟踪,在集群无人机故障检测与协同容错控制上具有很好的实际意义和应用前景。
技术研发人员:余自权,杨钟煜,程月华,徐贵力,姜斌
受保护的技术使用者:南京航空航天大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!