一种连续多点动态调平算法的制作方法
本申请涉及爬架调平算法,具体是一种连续多点动态调平算法。
背景技术:
1、目前很多设备或者施工平台都需要保证其工作环境是处于水平状态,并且需要进行实时调节。以目前建筑工地施工使用的爬架为例,爬架通过多个电机拉动,但是受多方因素的影响,拉动一段时间后,爬架的高度会不一致,导致爬架变形、损坏。从支撑方式上看,早期调平系统的支撑方式是三点支撑,随后出现了四点支撑,后来出现了六点支撑甚至八点支撑等。从驱动方式上看,最早的调平系统是依靠人工驱动的,后来依靠液压系统驱动,目前大部分采用机电驱动。从操作方式上看,早期调平系统是手动操作,采用液压驱动之后出现了半自动操作,随后过渡到自动操作。目前有位置误差控制调平法,一般采用“追逐式”调平方法,保持最高点、最低点或者中心点不动,将各点调节到同一位置,或者采用角度误差控制调平法,设定倾角误差,将各点调节到倾角误差范围视为调平。
2、对于一些复杂的工作环境,还存在大量的人工调平,但是不可避免的是人工调平调节时间长,调平精度差,操作难度大,人工成本高。位置误差控制法,“追逐式”将各个点调节到基准点上,需要计算出每个点与基准点的位置误差,这个位置计算是静态的,大部分依赖角度进行换算,且位置计算依赖于每个点之间的位置,不利于动态调整点于点之间的相对位置,不适合两点相距较远的场景。角度误差控制调平算法,将各个角度进行调零调平,需要按顺序逐个进行调整,但是调节距离和调节时间较长。
技术实现思路
1、本申请的目的在于提供一种连续多点动态调平算法,实现可以动态调整两点之间的位置,适应各种复杂环境。
2、为实现上述目的,本申请公开了以下技术方案:
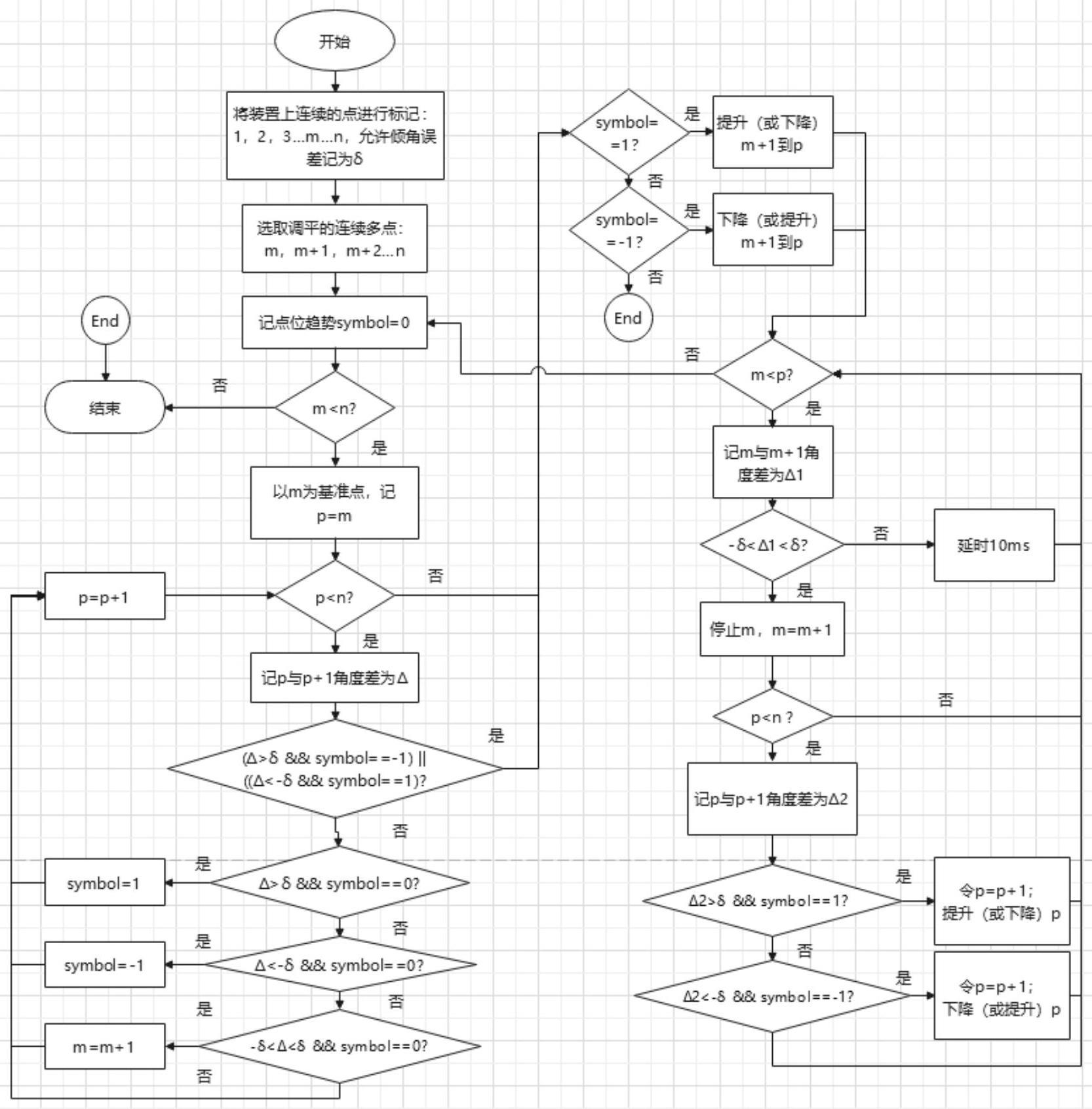
3、一种连续多点动态调平算法,该算法包括以下步骤:
4、步骤s1:对装置上连续的点进行标记,并将每个点标记为点1、点2、点3、……、点n,其中,n为大于等于1的整数值;
5、步骤s2:设置允许倾角误差δ;
6、步骤s3:选取需要调平的连续多点,并分别记为点m、点m+1、点m+2……,其中,其中,m为大于等于1的整数值;
7、步骤s4:将初始状态下的点位趋势symbol记为0;
8、步骤s5:以点m为基准点,初始化调平点为点p,且在初始状态下,p=m;
9、步骤s6:判断p是否小于n,是则执行步骤s7,否则执行步骤s13;
10、步骤s7:将点p与点p+1之间的角度差定义为δ;
11、步骤s8、当δ>δ且symbol=-1时,或δ<-δ且symbol=1时,执行步骤s13;
12、步骤s9:当δ>δ且symbol=0时,将初始点位趋势symbol修改为1,且令p=p+1,重复步骤s6、步骤s7和步骤s8;
13、步骤s10:当δ<-δ且symbol=0时,将初始点位趋势symbol修改为symbol=-1,且另p=p+1,重复步骤s6、步骤s7、步骤s8和步骤s9;
14、步骤s11:当-δ<δ<δ且symbol=0时,令m=m+1、p=p+1,重复步骤s6、步骤s7、步骤s8、步骤s9和步骤s10;
15、步骤s12:令p=p+1,重复步骤s6、步骤s7、步骤s8、步骤s9、步骤s10和步骤s11;
16、步骤s13:当symbol=1时,提升或下降点m+1的位置到点p的位置,并执行步骤s15;
17、步骤s14:当symbol=-1时,下降或提升点m+1的位置到点p的位置,并执行步骤s15;否则调平结束,退出调平算法;
18、步骤s15:当m≥p时,执行步骤s4;
19、步骤s16:将点m与点m+1之间的角度差记为δ1;
20、步骤s17:当-δ<δ1<δ时,停止点m的工作,令m=m+1,否则执行步骤s15;
21、步骤s18:当p<n时,将点p与点p+1之间的角度差记为δ2,否则执行步骤s15;
22、步骤s19:当δ2>δ且symbol=1时,令p=p+1,提升或下降点p,执行步骤s15;
23、步骤s20:当δ2<-δ且symbol=-1时,令p=p+1,下降或提升点p,执行步骤s15。
24、在一种实施方式中,在步骤s4和步骤s5之间,还包括步骤sa,所述步骤sa具体包括:当m>n时,调平结束,退出调平算法。
25、有益效果:本申请的连续多点动态调平算法,在角度误差控制调平算法上进行优化调整,实现可以动态调整两点之间的位置,并在调平过程中动态增加相邻调平点位,大大缩短调平时间,适应各种复杂环境。
技术特征:
1.一种连续多点动态调平算法,其特征在于,该算法包括以下步骤:
2.根据权利要求1所述的连续多点动态调平算法,其特征在于,在步骤s4和步骤s5之间,还包括步骤sa,所述步骤sa具体包括:当m>n时,调平结束,退出调平算法。
技术总结
本申请公开了一种连续多点动态调平算法,应用于爬架装置,涉及爬架调平算法技术领域,通过选取连续的多点:点m、点m+1、点m+2…点n,从m开始找到一段高度递增或递减的连续点点p到点q;将高度递增或递减的连续点点p+1到点q进行下降或上升过程中,如果点q后面的点q+1符合递增或递减条件,也加入下降或上升过程,实现动态调平连续多点;并且,能够制定调节连续的多点,实现不特定的调平整个装置。算法在角度误差控制调平上进行优化调整,实现可以动态调整两点之间的位置,并在调平过程中动态增加相邻调平点位,大大缩短调平时间,适应各种复杂环境。
技术研发人员:黄姻贵,陶建伟,周剑
受保护的技术使用者:广州三叠纪元智能科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!