基于姿态信息进行光伏清扫机器人平衡调整的系统及方法与流程
本发明涉及光伏清扫机器人,具体涉及一种基于姿态信息进行光伏清扫机器人平衡调整的系统及方法。
背景技术:
1、随着太阳能光伏发电的广泛应用和普及,太阳能光伏发电系统在现代能源生产中扮演着重要的角色,但为了保持其高效运行,光伏板的清洁和维护变得至关重要。传统的光伏板清洁通常依赖于人工操作,但存在效率低下、成本高昂和安全隐患等问题。
2、为了提高清洁效率、降低维护成本和减少安全风险,光伏发电领域对自主清洁机器人的需求日益增加。这些机器人可以自动巡视光伏板并进行清洁,而不需要人工干预。但是,清洁机器人在光伏板上运行时,可能会受到不同地形和倾斜度的影响,导致机器人的姿态发生变化。为了保持机器人的稳定性,需要一种姿态控制系统来自动调整机器人的姿态。而传统的姿态传感器可能不足以提供精确的姿态信息,因此需要高精度的传感器进行平衡调整以解决上述问题。
技术实现思路
1、有鉴于此,本发明的目的在于提出一种基于姿态信息进行光伏清扫机器人平衡调整的系统及方法,该方法使用高精度的9轴姿态传感器,通过监测机器人的姿态和运动状态,实现自主清扫光伏板并在不同地形和倾斜度下保持稳定性的功能。
2、基于上述目的,第一方面,本发明提供了一种基于姿态信息进行光伏清扫机器人平衡调整的系统,应用于扭转式光伏清扫机器人,该系统包括至少一台扭转式光伏清扫机器人,所述扭转式光伏清扫机器人包括机器人主体、清扫装置以及姿态调整系统;所述姿态调整系统包括姿态传感器、控制电路和执行器;所述姿态传感器用于实时监测机器人主体的姿态信息和运动状态数据,所述控制电路用于接收姿态传感器传输的姿态信息和运动状态数据并进行平衡调整的计算;所述执行器用于根据计算结果对机器人主体进行平衡调整;所述清扫装置安装在所述机器人主体的底盘上,用于执行光伏板的清扫操作。
3、作为本发明的进一步方案,所述姿态传感器为9轴姿态传感器,所述9轴姿态传感器包括加速度计、陀螺仪和磁力计,用于检测机器人的姿态和运动状态的实时数据。
4、作为本发明的进一步方案,所述9轴姿态传感器中还设有地磁传感器,用于利用卡尔曼滤波算法使航向角不产生累计误差,保证航向角的精确。
5、作为本发明的进一步方案,所述机器人主体由扭转式底盘和上部的清扫装置组成,所述扭转式底盘上安装有轮子或履带,用以实现机器人的移动和导航;所述清扫装置包括清扫刷,用于清洁光伏板表面的尘埃和污垢。
6、第二方面,本发明提供了一种基于姿态信息进行光伏清扫机器人平衡调整的方法,该方法基于上述所述的基于姿态信息进行光伏清扫机器人平衡调整的系统实现光伏清扫机器人平衡调整,该方法包括以下步骤:
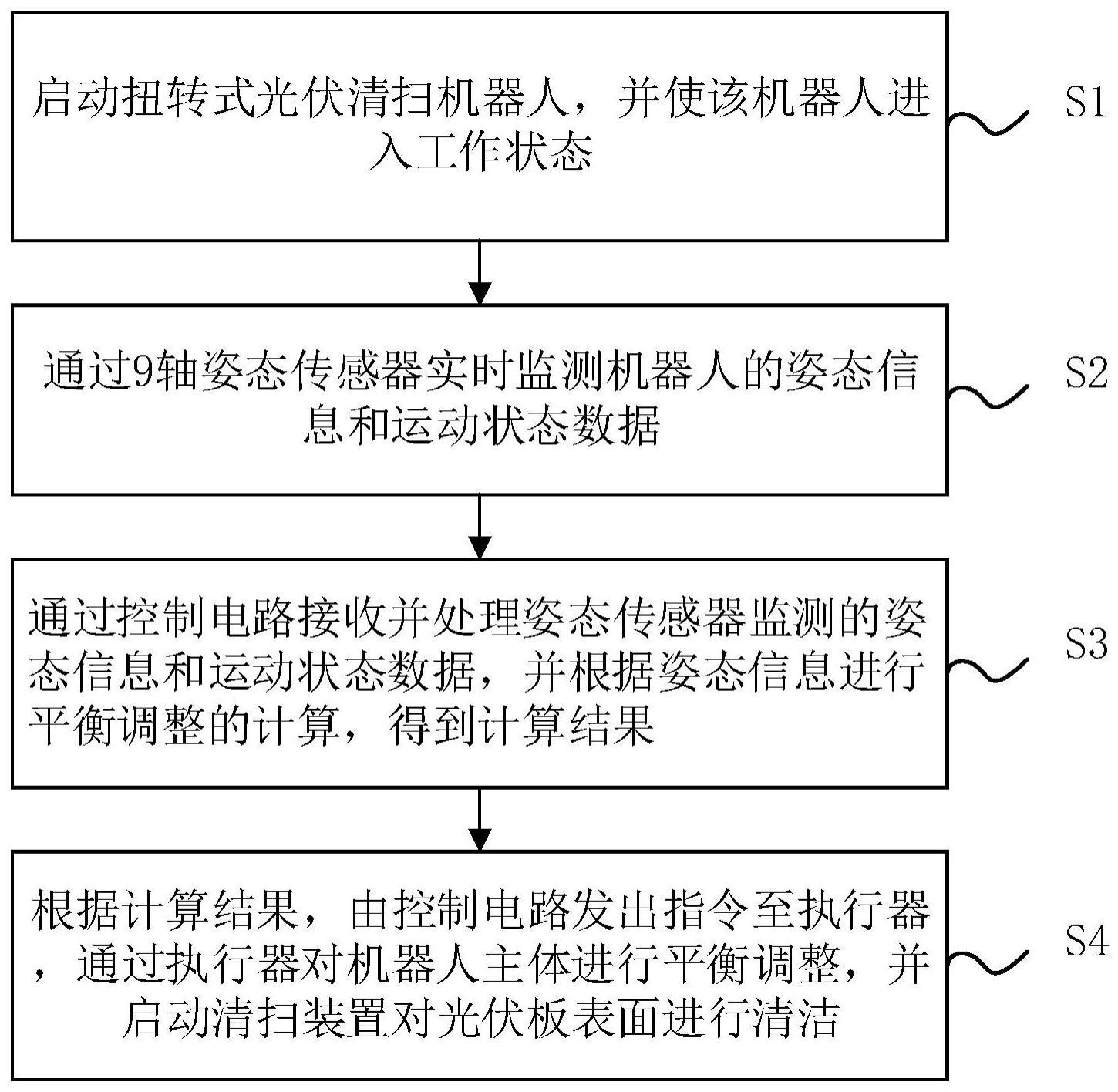
7、启动扭转式光伏清扫机器人,并使该机器人进入工作状态;
8、通过9轴姿态传感器实时监测机器人的姿态信息和运动状态数据;
9、通过控制电路接收并处理姿态传感器监测的姿态信息和运动状态数据,并根据姿态信息进行平衡调整的计算,得到计算结果;
10、根据计算结果,由控制电路发出指令至执行器,通过执行器对机器人主体进行平衡调整,并启动清扫装置对光伏板表面进行清洁。
11、作为本发明的进一步方案,所述基于姿态信息进行光伏清扫机器人平衡调整的方法还包括:所述清扫机器人据姿态传感器实时监测并反馈的信息,执行平衡调整计算以及对机器人主体进行平衡调整,使清扫机器人适应不同地形和倾斜度,确保清扫过程的稳定性和高效性。
12、作为本发明的进一步方案,启动扭转式光伏清扫机器人时,包括启动机器人的电源系统和激活控制系统。
13、作为本发明的进一步方案,通过9轴姿态传感器实时监测机器人的姿态信息和运动状态数据包括机器人的加速度、角速度和姿态角信息。
14、作为本发明的进一步方案,所述控制电路通过卡尔曼滤波算法处理姿态传感器的姿态信息和运动状态数据。
15、作为本发明的进一步方案,当机器人处于上下坡状态时,根据9轴姿态传感器侦测的xyz共计6个方向上的角度信息中x方向的角度信息,检测机器人是否处于桥架状态,当x轴获取的角度超过预设范围时,判定机器人处于上坡或下坡状态,并控制对应的电机降低行走速度或提高电机力矩使机器人通过桥架。
16、作为本发明的进一步方案,当机器人处于上下坡状态时,执行器暂时停止航向角的自动姿态调整功能,并在机器人重新回到正常状态位置时重新启动姿态调整功能
17、本发明的又一方面,还提供了一种计算机设备,包括存储器和处理器,该存储器中存储有计算机程序,该计算机程序被处理器执行时执行上述任一项根据本发明的基于姿态信息进行光伏清扫机器人平衡调整的方法。
18、本发明的再一方面,还提供了一种计算机可读存储介质,存储有计算机程序指令,该计算机程序指令被执行时实现上述任一项根据本发明的基于姿态信息进行光伏清扫机器人平衡调整的方法。
19、与现有技术相比较而言,本发明提出的一种基于姿态信息进行光伏清扫机器人平衡调整的系统及方法,具有以下有益效果:
20、1.稳定性和安全性提高:本发明利用9轴姿态传感器实时监测机器人的姿态和运动状态,通过平衡调整功能,确保机器人在清扫过程中保持稳定性。这有助于防止机器人在不平坦或倾斜的地形上翻倒或滑行,提高了操作的稳定性和安全性。
21、2.适应性增强:清扫机器人可以适应不同地形和倾斜度,包括光伏板上的坡道和桥架。机器人可以自主调整以适应这些条件,而无需人工干预,从而提高了其适应性和应用范围。
22、3.清扫效率提高:通过自动平衡调整,机器人能够在不同地形上保持稳定,这有助于提高清扫效率。机器人可以更有效地清理光伏板表面的尘埃和污垢,从而提高光伏板的发电效率。
23、4.减少人工干预:本发明减少了对机器人操作的人工干预需求。机器人能够自主进行平衡调整,而不需要外部操作员的持续监控和干预。这降低了人工成本,特别是在大规模光伏电站的清扫作业中。
24、5.自学习和智能化:本发明中的机器人具有自学习功能,可以根据桥架的角度信息进行调整。此外,机器人可以根据雷达数据定位自身位置,并相应地调整航向角。这增加了机器人的智能化和自主性,使其能够更好地适应不同工作环境。
25、6.延长光伏板寿命:清扫机器人的自主清扫能力可以延长光伏板的使用寿命。通过定期清理光伏板表面的尘埃和污垢,可以减少光伏板的损坏和降低维护成本,提高光伏电站的长期可维护性。
26、综上所述,本发明的系统及方法通过充分利用9轴姿态传感器的数据,实现了光伏清扫机器人的平衡调整,从而提高了清扫效率、稳定性和安全性,减少了人工干预,具有广泛的应用前景,对清洁能源行业和光伏发电系统的维护产生积极影响。
27、本申请的这些方面或其他方面在以下实施例的描述中会更加简明易懂。应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
技术特征:
1.一种基于姿态信息进行光伏清扫机器人平衡调整的系统,其特征在于,应用于扭转式光伏清扫机器人,该系统包括至少一台扭转式光伏清扫机器人,所述扭转式光伏清扫机器人包括机器人主体、清扫装置以及姿态调整系统;所述姿态调整系统包括姿态传感器、控制电路和执行器;所述姿态传感器用于实时监测机器人主体的姿态信息和运动状态数据,所述控制电路用于接收姿态传感器传输的姿态信息和运动状态数据并进行平衡调整的计算;所述执行器用于根据计算结果对机器人主体进行平衡调整;所述清扫装置安装在所述机器人主体的底盘上,用于执行光伏板的清扫操作。
2.根据权利要求1所述的基于姿态信息进行光伏清扫机器人平衡调整的系统,其特征在于,所述姿态传感器为9轴姿态传感器,所述9轴姿态传感器包括加速度计、陀螺仪和磁力计,用于检测机器人的姿态和运动状态的实时数据。
3.根据权利要求2所述的基于姿态信息进行光伏清扫机器人平衡调整的系统,其特征在于,所述9轴姿态传感器中还设有地磁传感器,用于利用卡尔曼滤波算法使航向角不产生累计误差。
4.根据权利要求1所述的基于姿态信息进行光伏清扫机器人平衡调整的系统,其特征在于,所述机器人主体由扭转式底盘和上部的清扫装置组成,所述扭转式底盘上安装有轮子或履带,所述清扫装置包括清扫刷。
5.一种基于姿态信息进行光伏清扫机器人平衡调整的方法,其特征在于,该方法基于权利要求2-4任一项所述的基于姿态信息进行光伏清扫机器人平衡调整的系统实现光伏清扫机器人平衡调整,该方法包括以下步骤:
6.根据权利要求5所述的基于姿态信息进行光伏清扫机器人平衡调整的方法,其特征在于,所述基于姿态信息进行光伏清扫机器人平衡调整的方法还包括:所述清扫机器人据姿态传感器实时监测并反馈的信息,执行平衡调整计算以及对机器人主体进行平衡调整。
7.根据权利要求6所述的基于姿态信息进行光伏清扫机器人平衡调整的方法,其特征在于,启动扭转式光伏清扫机器人时,包括启动机器人的电源系统和激活控制系统。
8.根据权利要求7所述的基于姿态信息进行光伏清扫机器人平衡调整的方法,其特征在于,通过9轴姿态传感器实时监测机器人的姿态信息和运动状态数据包括机器人的加速度、角速度和姿态角信息。
9.根据权利要求5所述的基于姿态信息进行光伏清扫机器人平衡调整的方法,其特征在于,所述控制电路通过卡尔曼滤波算法处理姿态传感器的姿态信息和运动状态数据。
10.根据权利要求8所述的基于姿态信息进行光伏清扫机器人平衡调整的方法,其特征在于,当机器人处于上下坡状态时,根据9轴姿态传感器侦测的xyz共计6个方向上的角度信息中x方向的角度信息,检测机器人是否处于桥架状态,当x轴获取的角度超过预设范围时,判定机器人处于上坡或下坡状态,并控制对应的电机降低行走速度或提高电机力矩使机器人通过桥架。
技术总结
本发明提供了基于姿态信息进行光伏清扫机器人平衡调整的系统及方法,该方法包括以下步骤:提供一台扭转式光伏清扫机器人,包括机器人主体、清扫装置和姿态调整系统;在姿态调整系统中,使用9轴姿态传感器来检测机器人的姿态和运动状态;通过控制电路接收并处理姿态传感器的数据,进行平衡调整的计算;根据计算结果,通过执行器对机器人主体进行平衡调整,以保持机器人在清扫过程中的稳定性。本发明通过利用9轴姿态传感器实时监测机器人的姿态和运动状态,实现平衡调整,确保机器人在清扫过程中的稳定性和安全性。通过自主平衡调整,机器人能够适应不同地形和倾斜度,提高清扫效率和覆盖范围。
技术研发人员:严海林,代高兵,陈磊
受保护的技术使用者:廊坊思拓新能源科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!