碰撞规避系统、深度成像系统、交通工具、地图生成器及其方法与流程
各方面一般涉及碰撞规避系统、交通工具、地图生成器、深度成像系统及其方法。
背景技术:
1、无人驾驶飞行器(uav)可具有用于控制无人驾驶飞行器沿着预定义飞行路径飞行的一个或多个处理器。用于控制无人驾驶飞行器的预定义飞行的一个或多个处理器可被称为飞行控制器或者可以是飞行控制器的一部分。预定义飞行路径可例如通过手动远程控制、航点控制、目标跟踪等来提供和/或修改。此外,障碍物检测和规避系统可被实现以避免无人驾驶飞行器与位于该无人驾驶飞行器的预定义飞行路径中的障碍物的碰撞。作为示例,具有障碍物检测的无人驾驶飞行器被配置成在固体对象(例如,墙壁、树木、柱子等)前面停止并由此避免碰撞。作为示例,障碍物检测可基于至少一个成像系统并且无人驾驶飞行器可包括与该至少一个成像系统相关联的一个或多个处理器。然而,障碍物检测也可基于其他合适的传感器系统。
技术实现思路
技术特征:
1.一种包括指令的非瞬态计算机可读介质,所述指令当被执行时,使一个或多个处理器用于:
2.如权利要求1所述的非瞬态计算机可读介质,其中,所述指令进一步使所述一个或多个处理器用于:为所述第一障碍物和所述第二障碍物中的每个障碍物确定方向信息。
3.如权利要求1所述的非瞬态计算机可读介质,其中,所述指令进一步使所述一个或多个处理器用于:为所述第一障碍物和所述第二障碍物中的每个障碍物确定距离信息。
4.如权利要求2或3所述的非瞬态计算机可读介质,其中,所述方向信息或所述距离信息被存储在列表中。
5.如权利要求1所述的非瞬态计算机可读介质,其中,所述第一障碍物和所述第二障碍物被确定为在预定的深度值范围内。
6.如权利要求1所述的非瞬态计算机可读介质,其中,相应障碍物的速度包括相对速度。
7.如权利要求1所述的非瞬态计算机可读介质,其中,所述指令进一步使所述一个或多个处理器用于:停用所述第二距离处的所述第二障碍物的确定,并且仅基于与所述第一障碍物相关联的移动信息确定虚拟力向量。
8.如权利要求1所述的非瞬态计算机可读介质,其中,相应的移动信息以预定义的时间间隔被确定,并且相对位置随时间的变化被限于最大比率。
9.一种方法,包括:
10.如权利要求9所述的方法,进一步包括:为所述第一障碍物和所述第二障碍物中的每个障碍物确定方向信息。
11.如权利要求9所述的方法,进一步包括:为所述第一障碍物和所述第二障碍物中的每个障碍物确定距离信息。
12.如权利要求10或11所述方法,其中,所述方向信息或所述距离信息被存储在列表中。
13.如权利要求9所述的方法,其中,所述第一障碍物和所述第二障碍物被确定为在预定的深度值范围内。
14.如权利要求9所述的方法,其中,相应障碍物的速度包括相对速度。
15.如权利要求9所述的方法,进一步包括:停用所述第二距离处的所述第二障碍物的确定,并且仅基于与所述第一障碍物相关联的移动信息确定虚拟力向量。
16.如权利要求9所述的方法,其中,相应的移动信息以预定义的时间间隔被确定,并且相对位置随时间的变化被限于最大比率。
17.一种碰撞规避系统的装置,所述装置包括:
18.一种设备,包括用于执行如权利要求9-16所述的任一方法的装置。
技术总结
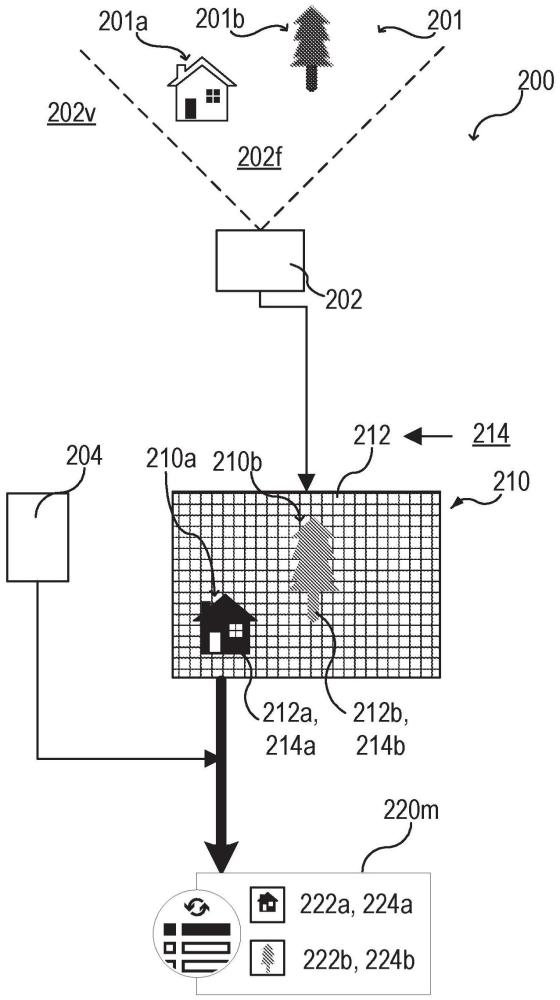
本申请公开了碰撞规避系统、深度成像系统、交通工具、地图生成器及其方法。根据各方面,一种碰撞规避方法可包括:接收无人驾驶飞行器的一个或多个深度成像传感器的深度信息;从该深度信息中确定位于第一距离范围内的第一障碍物以及与该第一障碍物相关联的移动信息;从该深度信息中确定位于第二距离范围内的第二障碍物以及与该第二障碍物相关联的移动信息,第二距离范围不同于第一距离范围;基于所确定的移动信息来确定虚拟力向量;以及基于该虚拟力向量来控制该无人驾驶飞行器的飞行以使该无人驾驶飞行器避免与第一障碍物和第二障碍物碰撞。
技术研发人员:A·瑞尔,D·波尔,M·阿克特利克,B·耶格,J·W·弗沃斯特
受保护的技术使用者:英特尔公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!