一种收割机及其工况识别方法和整车控制器与流程
本申请涉及收割机控制,更具体的说,涉及一种收割机及其工况识别方法和整车控制器。
背景技术:
1、谷物联合收割机简称联合收割机,联合收割机是能够一次完成谷物类作物的收割、脱粒、分离茎秆和清楚杂余物等工序,可以直接在田间获取谷粒的收获机械。目前,我国农作物收获方式逐渐由人工转变为机械化作业,联合收割机在国内具有广泛的应用,有效缓解了农民高强度农业劳作压力。
2、联合收割机运行存在不同的工况,不同工况整车工作装置、发动机的运行状态也不同,现有联合收割机没有工况识别功能,只能机械地根据驾驶人员操作运行在所需工况。
技术实现思路
1、有鉴于此,本申请提供了一种收割机及其工况识别方法和整车控制器,方案如下:
2、一种收割机的工况识别方法,收割机具有液压行走系统;液压行走系统包括:行走泵和行走马达;行走泵的排量可调节;
3、工况识别方法包括:
4、获取收割机的运行数据,运行数据包括:滚筒转速、卸粮筒转速、车速、发动机负荷率、发动机转速以及油门开度中的至少一者;
5、基于运行数据,确定收割机的工况;其中,收割机的工况至少包括:原地卸粮工况和转场工况;
6、如果确定收割机处于原地卸粮工况,将发动机转速由额定转速降低到第一转速;
7、如果确定收割机处于转场工况,将行走泵的排量由额定排量提升到第一排量,将发动机转速由额定转速降低到第一转速。
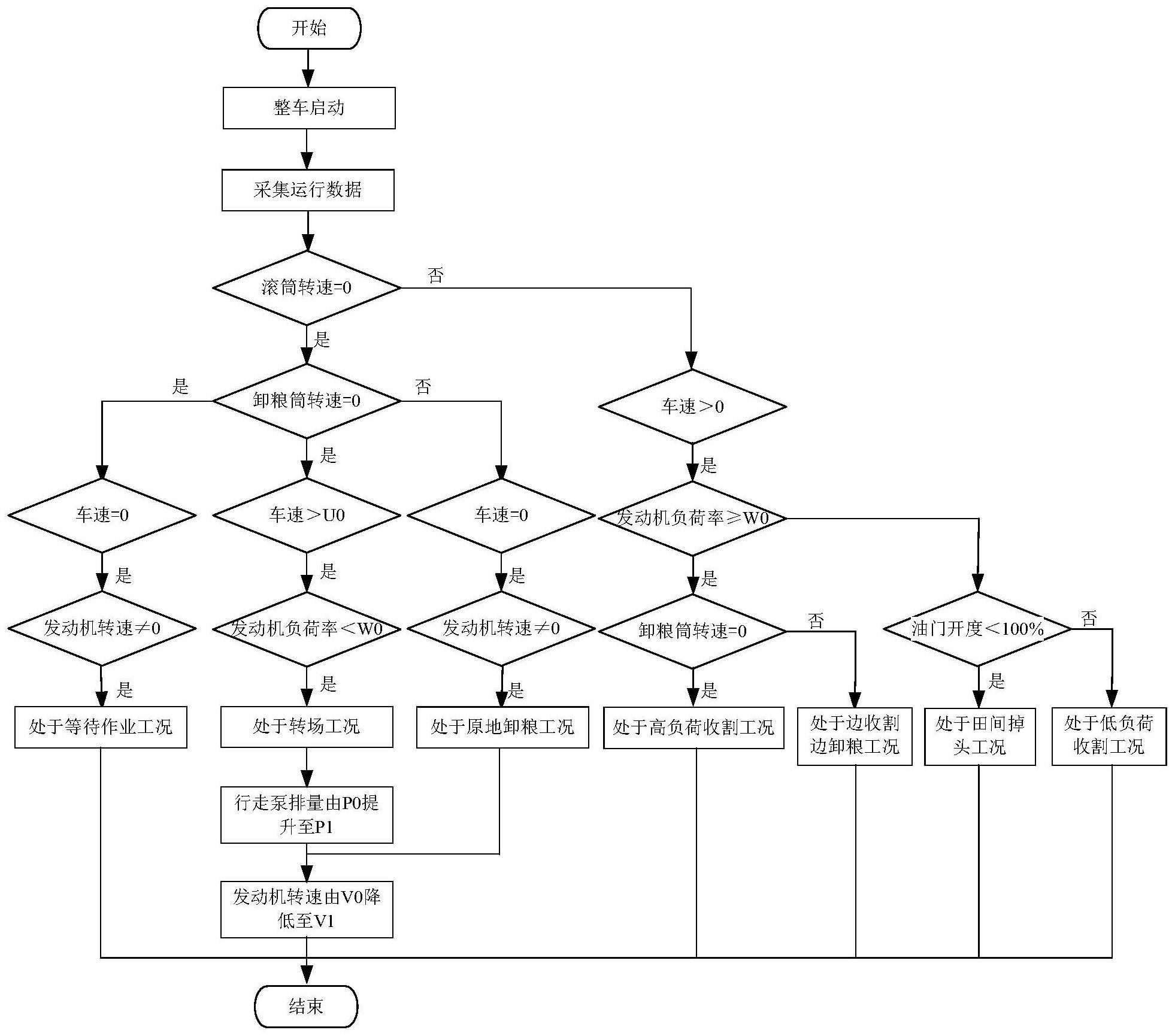
8、优选的,在上述工况识别方法中,确定收割机工况的方法包括:
9、判断滚筒转速是否等于0;
10、如果滚筒转等于零,判断卸粮筒转速是否等于0;
11、如果卸粮筒转速不等于0,在车速等于0,且发动机转速大于0时,确定处于原地卸粮工况;
12、如果卸粮筒转速等于0,在车速大于设定速度阈值,且发动机负荷率小于设定负荷阈值时,确定处于转场工况。
13、优选的,在上述工况识别方法中,还包括:
14、如果滚筒转速不等于0,基于车速、发动机负荷率、卸粮转筒速度以及油门开度,确定所处收割作业工况。
15、优选的,在上述工况识别方法中,确定所处收割作业工况的方法至少包括如下方式之一:
16、如果车速大于0,发动机负荷率不小于设定负荷阈值,卸粮筒转速等于0,确定处于高负荷收割工况;
17、如果车速大于0,发动机负荷率不小于设定负荷阈值,卸粮筒转速不等于0,确定处于边收割边卸粮工况;
18、如果车速大于0,发动机负荷率小于设定负荷阈值,油门开度小于100%,确定处于田间掉头工况;
19、如果车速大于0,发动机负荷率小于设定负荷阈值,油门开度等于100%,确定处于低负荷收割工况。
20、优选的,在上述工况识别方法中,如果卸粮筒转速等于0,还包括:
21、在车速等于0,发动机转速不等于0时,确定处于等待作业工况。
22、优选的,在上述工况识别方法中,还包括:
23、输出第一显示信息,第一显示信息用于展示收割机的当前工况。
24、优选的,在上述工况识别方法中,还包括:
25、获取目标工况;
26、基于目标工况以及当前工况,输出第二显示信息;第二显示信息用于展示从当前工况切换到目标工况的操作信息。
27、本申请还提供了一种整车控制器,整车控制器能够执行上述任一项收割机的工况识别方法,整车控制器包括:
28、获取模块,获取模块用于获取收割机的运行数据,运行数据包括:滚筒转速、卸粮筒转速、车速、发动机负荷率、发动机转速以及油门开度中的至少一者;
29、处理模块,处理模块用于基于运行数据,确定收割机的工况;其中,工况至少包括:原地卸粮工况和转场工况;如果确定收割机处于原地卸粮工况,将发动机转速由额定转速降低到第一转速;如果确定收割机处于转场工况,将行走泵的排量由额定排量提升到第一排量,将发动机转速由额定转速降低到第一转速。
30、优选的,在上述整车控制器中,处理模块包括:
31、判断单元,判断单元用于判断滚筒转速是否等于0,如果滚筒转等于零,还用于判断卸粮筒转速是否等于0;
32、处理单元,如果卸粮筒转速不等于0,处理单元用于在车速等于0,且发动机转速大于0时,确定处于原地卸粮工况;如果卸粮筒转速等于0,处理单元用于车速大于设定速度阈值,且发动机负荷率小于设定负荷阈值时,确定处于转场工况。
33、本申请还提供了一种收割机,包括:
34、发动机;
35、与发动机连接的发动机控制器,发动机控制器用于监控并控制发动机的运行状态;
36、液压行走系统,液压行走系统包括:行走泵和行走马达;行走泵的排量可调节;液压行走系统用于通过行走泵将发动机传递出的机械能转换为液压能,通过行走马达将液压能转换的机械能传递到变速装置以及驱动轮,驱动整车行走;
37、采集装置,采集装置用于采集收割机的运行数据,运行数据包括:滚筒转速、卸粮筒转速、车速、发动机负荷率、发动机转速以及油门开度中的至少一者;
38、上述整车控制器,整车控制器分别与采集装置、液压行走系统以及发动机控制器连接。
39、通过上述描述可知,本申请技术方案提供的收割机及其工况识别方法和整车控制器中,工况识别方法包括:获取收割机的运行数据,运行数据至少包括:滚筒转速、卸粮筒转速以及车速;至少基于滚筒转速、卸粮筒转速以及车速,确定收割机的工况;其中,工况至少包括:原地卸粮工况和转场工况;如果确定收割机处于原地卸粮工况,将发动机转速由额定转速降低到第一转速;如果确定收割机处于转场工况,将行走泵的排量由额定排量提升到第一排量,将发动机转速由额定转速降低到第一转速。本申请技术方案不仅能够自动识别收割机的当前所处工况,还能够在无高负荷要求的原地卸粮工况以及转场工况下,降低发动机转速,实现降低油耗和降低噪声的目的。
技术特征:
1.一种收割机的工况识别方法,其特征在于,所述收割机具有液压行走系统;所述液压行走系统包括:行走泵和行走马达;所述行走泵的排量可调节;
2.根据权利要求1所述的工况识别方法,其特征在于,确定所述收割机工况的方法包括:
3.根据权利要求2所述的工况识别方法,其特征在于,还包括:
4.根据权利要求3所述的工况识别方法,其特征在于,确定所处收割作业工况的方法至少包括如下方式之一:
5.根据权利要求3所述的工况识别方法,其特征在于,如果所述卸粮筒转速等于0,还包括:
6.根据权利要求3所述的工况识别方法,其特征在于,还包括:
7.根据权利要求3所述的工况识别方法,其特征在于,还包括:
8.一种整车控制器,其特征在于,所述整车控制器能够执行如权利要求1-7任一项所述收割机的工况识别方法,所述整车控制器包括:
9.根据权利要求8所述的整车控制器,其特征在于,所述处理模块包括:
10.一种收割机,其特征在于,包括:
技术总结
本申请公开了一种收割机及其工况识别方法和整车控制器,工况识别方法包括:获取收割机的运行数据,运行数据至少包括:滚筒转速、卸粮筒转速以及车速;至少基于滚筒转速、卸粮筒转速以及车速,确定收割机的工况;其中,工况至少包括:原地卸粮工况和转场工况;如果确定收割机处于原地卸粮工况,将发动机转速由额定转速降低到第一转速;如果确定收割机处于转场工况,将行走泵的排量由额定排量提升到第一排量,将发动机转速由额定转速降低到第一转速。本申请技术方案不仅能够自动识别收割机的当前所处工况,还能够在无高负荷要求的原地卸粮工况以及转场工况下,降低发动机转速,实现降低油耗和降低噪声的目的。
技术研发人员:刘世浩,杨国涛,刘德凯,吴佳男,崔健,常钧翔
受保护的技术使用者:潍柴动力股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!