自动引导运输车调度方法和装置与流程
本发明涉及agv,特别涉及一种自动引导运输车agv调度方法和装置。
背景技术:
1、agv(automated guided vehicle,自动引导运输车)是一种运输物料的智能化用具,在仓储自动化分拣系统得到大量应用。agv可以根据指令进行点对点的自动存取搬运作业,具有精细化、柔性化、信息化、缩短物流时间、降低商品损耗、减少投资成本等特点。
2、相关技术中,仓库内一旦出现需要人工作业的情况,例如仓库中增设新存储区、agv活动地面的维修等,会将所有的agv停止运动,并人为移动agv离开人工作业区域,但是正在运动的机器人可能会由于延时误差继续运动或因急刹车造成突发事故,且这种方式效率低、耗费大量时间和人力。
技术实现思路
1、有鉴于此,本发明提供一种自动引导运输车agv调度方法和装置,以解决如何清空新管制区域(人工作业区域和人工进场路径)内的agv的问题。
2、在一个实施例中,提供了一种自动引导运输车agv调度方法,包括:
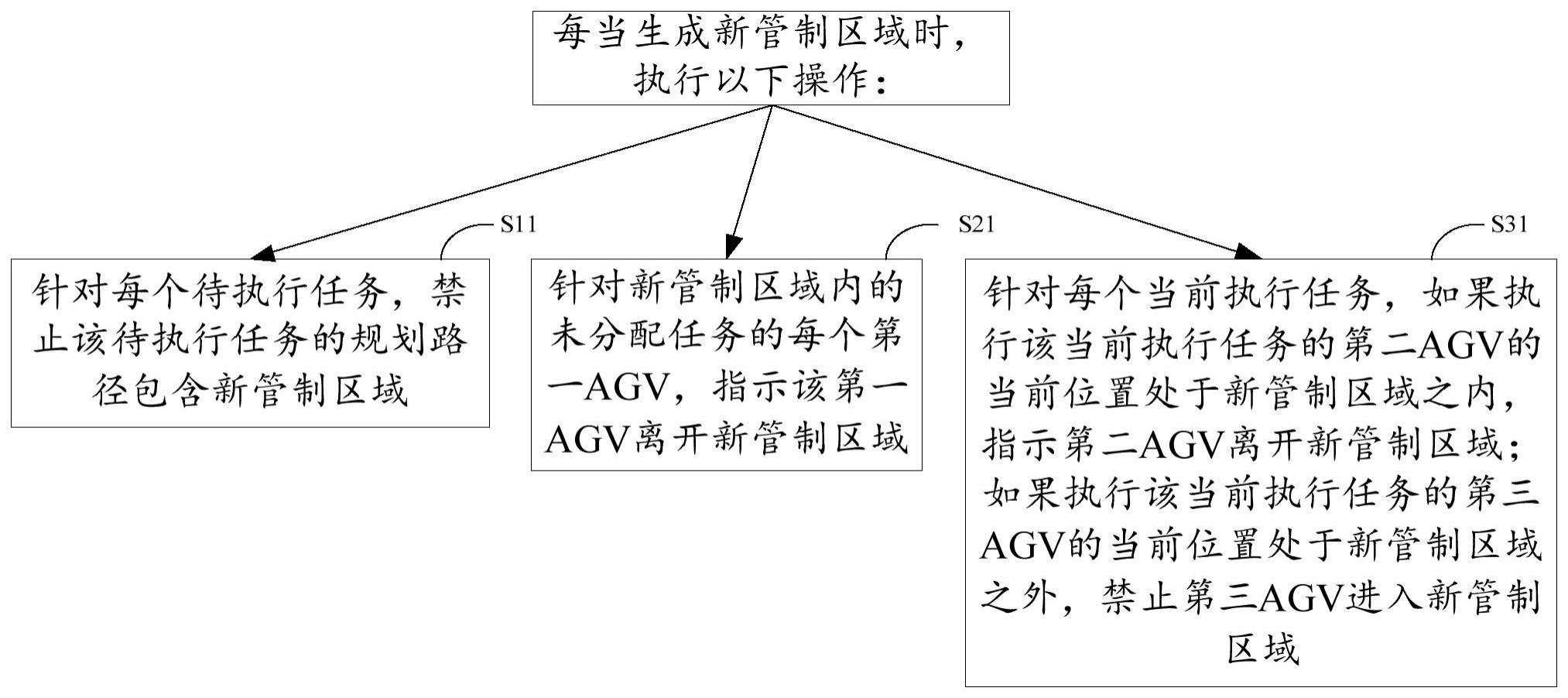
3、每当生成新管制区域时,执行以下操作:
4、针对每个待执行任务,禁止该待执行任务的规划路径包含新管制区域;
5、针对新管制区域内的未分配任务的每个第一agv,指示该第一agv离开新管制区域;
6、针对每个当前执行任务,如果执行该当前执行任务的第二agv的当前位置处于新管制区域之内,指示第二agv离开新管制区域;如果执行该当前执行任务的第三agv的当前位置处于新管制区域之外,禁止第三agv进入新管制区域。
7、在另一个实施例中,提供一种非瞬时计算机可读存储介质,非瞬时计算机可读存储介质存储指令,指令在由处理器执行时使得处理器执行上述自动引导运输车agv调度方法中的步骤。
8、在另一个实施例中,提供一种自动引导运输车agv调度装置,包括处理器和上述的非瞬时计算机可读存储介质。
9、本发明提供的自动引导运输车agv调度方法和装置,相比现有技术,只停止与新管制区域关联的agv工作,既无需所有agv停工,也无需人工搬移agv,因此,本发明的方法不仅提高了人工作业效率,也尽量避免对原有agv作业的影响,维护了仓库的整体工作效率。
技术特征:
1.一种自动引导运输车agv调度方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述禁止该待执行任务的规划路径包含所述新管制区域进一步包括:
3.根据权利要求1所述的方法,其特征在于,所述方法进一步包括:
4.根据权利要求1所述的方法,其特征在于,所述指示所述第二agv离开所述新管制区域包括:
5.根据权利要求1所述的方法,其特征在于,所述禁止所述第三agv进入所述新管制区域进一步包括:
6.根据权利要求1至5任一所述的方法,其特征在于,所述方法进一步包括:
7.根据权利要求6所述的方法,其特征在于,所述方法进一步包括:
8.根据权利要求2所述的方法,其特征在于,所述如果该待执行任务的任务目的地不是新管制区域,则禁止该待执行任务的规划路径包含新管制区域,包括:
9.一种非瞬时计算机可读存储介质,其特征在于,所述非瞬时计算机可读存储介质存储指令,所述指令在由处理器执行时使得所述处理器执行如权利要求1至8中任一所述的自动引导运输车agv调度方法中的步骤。
10.一种自动引导运输车agv调度装置,其特征在于,包括处理器和如权利要求9所述的非瞬时计算机可读存储介质。
技术总结
本发明提供了一种AGV调度方法和装置,包括:每当生成新管制区域时,执行以下操作:针对每个待执行任务,禁止该待执行任务的规划路径包含新管制区域;针对新管制区域内的未分配任务的每个第一AGV,指示该第一AGV离开新管制区域;针对每个当前执行任务,如果执行该当前执行任务的第二AGV的当前位置处于新管制区域之内,指示第二AGV离开新管制区域;如果执行该当前执行任务的第三AGV的当前位置处于新管制区域之外,禁止第三AGV进入新管制区域。本发明的自动引导运输车AGV调度方法和装置,不仅提高了人工作业效率,也尽量避免对原有AGV作业的影响,维护了仓库的工作效率。
技术研发人员:缪松华
受保护的技术使用者:杭州海康机器人股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!