一种臂架回转检测系统及其控制方法与流程
本发明涉及臂架控制,尤其涉及一种臂架回转检测系统及其控制方法。
背景技术:
1、高空作业车的臂架在进行回转对中限位操作时,操作人员在驾驶室内操作控制面板以控制转台旋转,以带动臂架转动至限位位置,当臂架回转至限位位置时,臂架上的限位销与底盘上的限位槽能够进行对中,随后再将限位销插入至限位槽内以完成臂架的对中限位操作。
2、目前,驾驶室内的操作人员往往凭借直觉与经验操控臂架旋转,直至限位销与限位槽对中以满足限位要求,无法实时观测臂架的实时回转角度,从而给操作带来不便。为解决上述问题,现有技术中也专门发明设计了一些臂架回转对中系统,如授权公告号为cn204705896u的申请文件,其公开了一种工程机械及臂架回转对中控制系统,具体地,其通过设置旋转编码器,能够实时获取臂架旋转的方向和角度信息,进而使工程机械的控制器根据旋转编码器采集的信息控制臂架向中位旋转,有效提升了回转对中过程的操作效率和准确性,节省人力消耗。
3、但现有技术中也存在一些不足:臂架在回转过程中若稍有不慎,回转中的臂架将会与其周围的外部部件相碰撞,造成意外,影响作业过程的安全性;当臂架转动至限位位置时,还需人工手动将限位销插接至限位槽内,自动化程度差,也影响对准操作的整体效率。
技术实现思路
1、本发明的目的在于提供一种臂架回转检测系统及其控制方法,能够有效提升臂架回转对中作业过程的自动化程度与安全性。
2、为达此目的,本发明的第一方面,提供一种臂架回转检测系统,设置于工程机械上,所述工程机械包括底盘、臂架和控制元件,所述控制元件能驱动所述臂架相对所述底盘转动,所述臂架回转检测系统包括:
3、限位执行组件,包括推动件和限位杆,所述推动件设于所述臂架上并与所述控制元件通讯连接,所述限位杆设于所述推动件上,并能够从所述推动件中伸出或者缩回至所述推动件中,所述臂架能相对所述底盘转动并具有限位位置,所述底盘上开设有与所述限位位置相对应的限位槽;
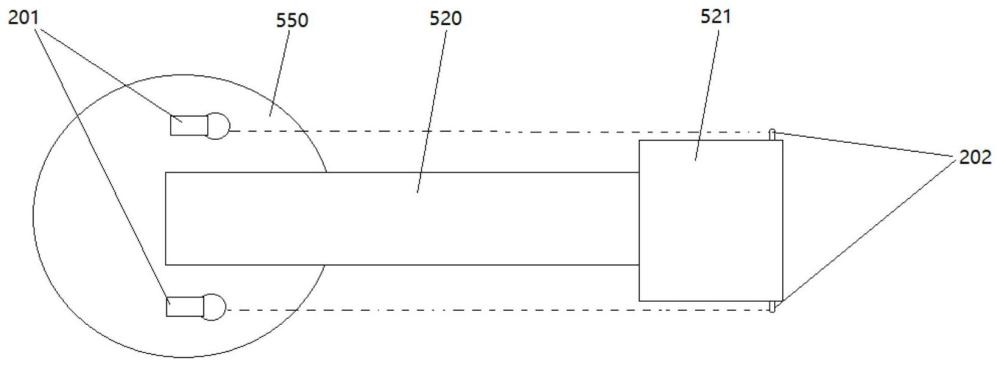
4、距离检测元件,包括设置在所述底盘上且位于所述臂架两侧的激光发射器,以及,设置在臂架端部的辅具两侧的分别用于接收同侧设置的激光发射器发射的激光的激光接收器,所述激光接收器与所述控制元件通讯连接,所述距离检测元件用于检测所述臂架与周围物件之间的距离;
5、所述控制元件适于在所述臂架转动至所述限位位置时控制所述推动件以驱动所述限位杆伸出并插入至所述限位槽内,并在所述距离检测元件检测到所述臂架与周围物件间的距离小于阈值间距时控制所述臂架停止转动。
6、在一些实施例中,还包括回转角度检测元件,所述回转角度检测元件与所述控制元件通讯连接,所述回转角度检测元件能检测所述臂架的回转角度并将对应的回转角度数据发送至所述控制元件,所述控制元件能够根据所述回转角度数据来控制所述推动件,以使所述推动件带动所述限位杆伸出或缩回。
7、在一些实施例中,所述限位位置包括前限位位置和后限位位置,所述限位槽包括前限位槽和后限位槽;其中,
8、所述前限位槽和所述后限位槽分别开设于所述底盘于前后方向相对的两侧上且分别与所述前限位位置和所述后限位位置相对应;
9、所述控制元件适于在所述臂架转动至所述前限位位置时控制所述推动件以驱动所述限位杆伸出并插入至所述前限位槽内;所述控制元件适于在所述臂架转动至所述后限位位置时控制所述推动件以驱动所述限位杆伸出并插入至所述后限位槽内。
10、在一些实施例中,还包括报警元件,所述报警元件与所述控制元件通讯连接,所述控制元件适于在所述距离检测元件检测到所述臂架与周围物件间的距离小于阈值间距时控制所述报警元件报警。
11、在一些实施例中,还包括摄录组件,所述摄录组件包括摄录单元和显示单元,所述摄录单元设于所述臂架上,所述显示单元用于在所述距离检测元件检测到所述臂架与周围物件间的距离小于阈值间距时通过所述摄录单元将小于阈值间距的部位进行显示。
12、在一些实施例中,所述推动件设置为推杆,所述推杆的固定端固定设于所述臂架上,所述推杆的伸缩端端部通过转接头连接所述限位杆。
13、在一些实施例中,所述推动件设置为伸缩缸,所述伸缩缸的缸体固定设于所述臂架上,所述伸缩缸的活塞杆通过转接头连接所述限位杆。
14、在一些实施例中,位于所述臂架两侧的激光发射器和激光接收器的连线相互平行。
15、在本发明的第二方面,提供一种臂架回转检测控制方法,应用于上述任意一项所述的臂架回转检测系统,包括:
16、距离检测元件通过激光接收器接收激光发射器发射出的激光检测臂架与周围物件之间的距离,并将生成的距离检测信息发送至控制元件;
17、回转角度检测元件按照第二预设时间间隔检测臂架的回转角度,并将生成的角度检测信息发送至控制元件;
18、响应于所述臂架与周围物件之间的距离小于第一预设阈值,和/或,臂架的回转角度与预设回转角度的差值大于第二预设阈值,控制元件用于控制臂架停止相对底盘的转动。
19、在一些实施例中,还包括:
20、控制单元,用于控制报警元件进行报警。
21、工程机械应用本发明提供的臂架回转检测系统,当进行臂架回转对中工作时,控制元件驱动臂架相对底盘转动,过程中距离检测元件对臂架与周围物件间的距离进行实时检测,并将所检测到的距离实时发送至控制元件,若距离检测元件检测到臂架与工程机械自身附件、臂架周围的障碍物等周围物件之间的距离小于阈值间距时,控制元件将及时控制臂架停止转动,避免臂架发生碰撞,保证臂架回转对中过程中的安全性。此外,当臂架转动至对中位置时,限位杆也移动至限位位置并与限位槽相对设置,此时控制元件控制推动件,使推动件直接驱动限位杆伸出并插入至限位槽内,从而完成臂架的回转对中限位工作,可有效提升操作的自动化程度,节省人力消耗,提升操作效率。
技术特征:
1.一种臂架回转检测系统,设置于工程机械上,所述工程机械包括底盘、臂架和控制元件,所述控制元件能驱动所述臂架相对所述底盘转动,其特征在于,所述臂架回转检测系统包括:
2.根据权利要求1所述的臂架回转检测系统,其特征在于,还包括回转角度检测元件,所述回转角度检测元件与所述控制元件通讯连接,所述回转角度检测元件能检测所述臂架的回转角度并将对应的回转角度数据发送至所述控制元件,所述控制元件能够根据所述回转角度数据来控制所述推动件,以使所述推动件带动所述限位杆伸出或缩回。
3.根据权利要求2所述的臂架回转检测系统,其特征在于,所述限位位置包括前限位位置和后限位位置,所述限位槽包括前限位槽和后限位槽;其中,
4.根据权利要求1所述的臂架回转检测系统,其特征在于,还包括报警元件,所述报警元件与所述控制元件通讯连接,所述控制元件适于在所述距离检测元件检测到所述臂架与周围物件间的距离小于阈值间距时控制所述报警元件报警。
5.根据权利要求1所述的臂架回转检测系统,其特征在于,还包括摄录组件,所述摄录组件包括摄录单元和显示单元,所述摄录单元设于所述臂架上,所述显示单元用于在所述距离检测元件检测到所述臂架与周围物件间的距离小于阈值间距时通过所述摄录单元将小于阈值间距的部位进行显示。
6.根据权利要求1所述的臂架回转检测系统,其特征在于,所述推动件设置为推杆,所述推杆的固定端固定设于所述臂架上,所述推杆的伸缩端端部通过转接头连接所述限位杆。
7.根据权利要求1所述的臂架回转检测系统,其特征在于,所述推动件设置为伸缩缸,所述伸缩缸的缸体固定设于所述臂架上,所述伸缩缸的活塞杆通过转接头连接所述限位杆。
8.根据权利要求3所述的臂架回转检测系统,其特征在于,位于所述臂架两侧的激光发射器和激光接收器的连线相互平行。
9.一种臂架回转检测系统控制方法,应用于如权利要求1-8任意一项所述的臂架回转检测系统,其特征在于,包括:
10.根据权利要求9所述的臂架回转检测系统控制方法,其特征在于,还包括:
技术总结
本发明公开了一种臂架回转检测系统及其控制方法,属于臂架控制技术领域,系统包括:限位执行组件,包括推动件和限位杆,推动件设于臂架上并与控制元件通讯连接,限位杆设于推动件上,臂架能相对底盘转动并具有限位位置,底盘上开设有与限位位置相对应的限位槽;距离检测元件,包括设置在底盘上且位于臂架两侧的激光发射器,以及,设置在臂架端部的辅具两侧的分别用于接收同侧设置的激光发射器发射的激光的激光接收器;控制元件用于检测臂架的转动位置至限位位置时控制推动件以驱动限位杆伸出并插入至限位槽内,并在距离检测元件检测到臂架与周围物件间的距离小于阈值间距时控制臂架停止转动。能够提升臂架回转对中作业过程的自动化与安全性。
技术研发人员:尹文超,李进,王德红,王雷,刘志军
受保护的技术使用者:临工重机股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!