基于异构多处理系统的AGV控制器
本发明属于agv智能控制,特别是基于异构多处理系统的agv控制器。
背景技术:
1、自动导引车(agv)是一种配备有电磁或光学等自动导引装置,能够沿着预定导引路径行驶,具有安全保护装置以及各种移载功能的运输车,agv小车拥有高度自动化、高工作效率、强可控性、出色安全性和可靠性等优势。
2、车载控制器是agv控制系统的核心,负责完成小车全部行为的指挥和控制。目前控制器一般采用plc(可编程逻辑控制器)、工控机或单片机来完成,plc多限于做简单的计算和运动控制,运算能力弱,难以满足目前复杂环境下的定位导航需求;工控机本质上是一台经过特殊设计的个人电脑,虽然具有高性能的优点,但往往体积和功耗都很大且价格昂贵,在小型agv难以适配应用;单片机相比而言价格适中、功能也尚可,但随着生产格局的日益变化,企业对agv的智能程度有了越来越高的需求,单片机在进行图像处理、激光点云处理等高密度数据进行神经网络处理方面受到很大的算力限制,同时为满足agv在复杂环境下处理算法的复杂性和控制的高实时性,一般需要采用上位机和下位机两块处理板来实现,通过串口或者can总线完成上下位机的通信,两块处理板将在功耗、通信、布线、占用空间以及成本等方面带来显著的消耗。
技术实现思路
1、为了解决两块处理板的消耗、嵌入式平台基于神经网络的难以实现实时计算的问题,本发明提供了基于异构多处理系统的agv控制器,异构处理系统核心板通过板间连接器插在底板之上。
2、基于异构多处理系统的agv控制器包括:
3、底板,其包括电源模块、按键以及外围接口;
4、核心板,其通过板间连接器插在所述底板上,所述核心板包括异构多处理系统芯片、晶振和内存,所述异构多处理系统芯片包括,
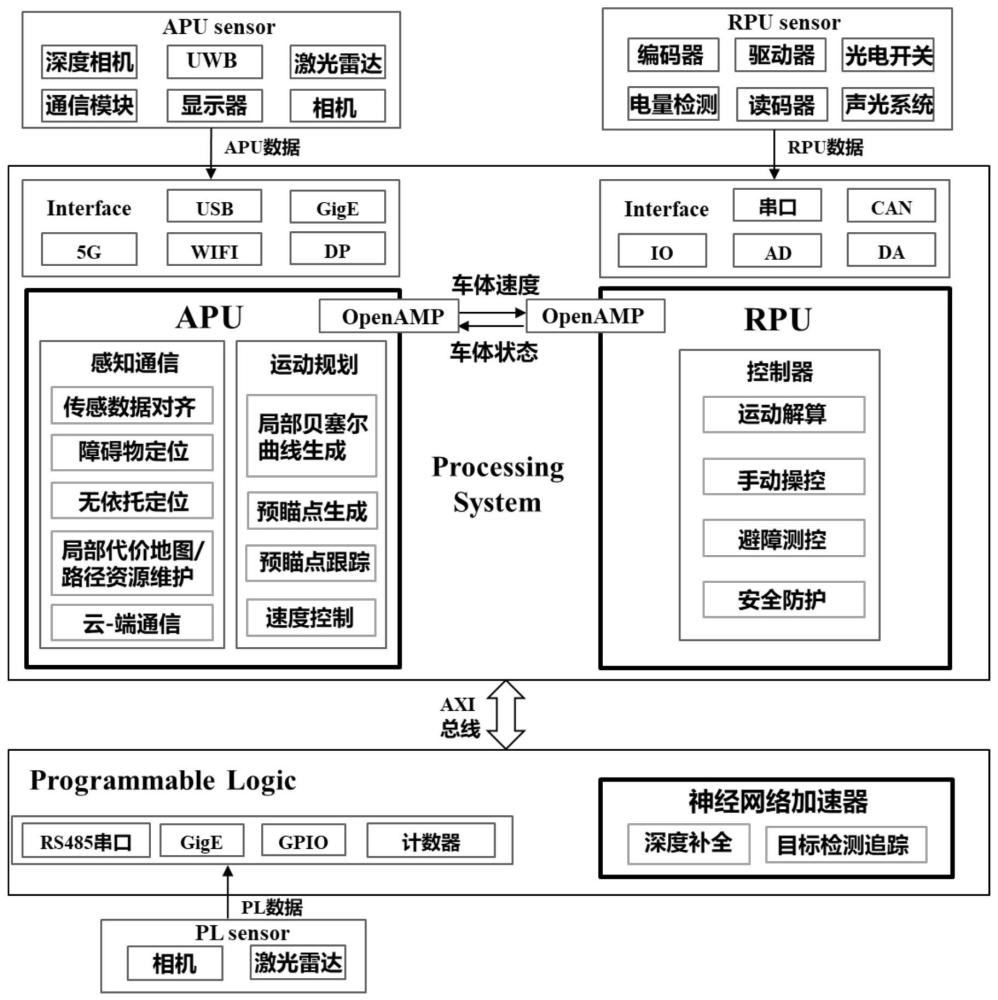
5、处理系统ps侧,其包括应用处理单元apu和实时处理单元rpu;
6、可编程逻辑pl侧,其包括带有神经网络加速器的fpga,处理系统ps侧将图像数据传给可编程逻辑pl侧的神经网络加速器进行基于深度学习的目标检测。
7、所述的基于异构多处理系统的agv控制器中,应用处理单元apu运行用于处理应用算法的嵌入式操作系统。
8、所述的基于异构多处理系统的agv控制器中,所述嵌入式操作系统为基于petalinux下的linux操作系统,其处理感知、定位、规划、决策算法。
9、所述的基于异构多处理系统的agv控制器中,所述应用处理单元apu包括感知通信模块和运动规划模块,所述感知通信模块包括传感数据对齐单元、障碍物定位单元、无依托定位单元、局部代价地图单元和云端通信单元,所述运动规划模块包括局部贝赛尔曲线生成单元、预瞄点生成单元、预瞄点跟踪单元和速度控制单元。
10、所述的基于异构多处理系统的agv控制器中,所述应用处理单元apu经由所述外围接口连接apu传感装置,apu传感装置包括深度相机、uwb、激光雷达、通信模块和显示器,所述应用处理单元apu将apu传感装置的传感数据时间戳对齐,进行多源传感器数据融合处理实现环境感知和定位,根据通信模块接收到的云端通信单元所下发的任务路径,进行路径规划,由运动规划模块生成agv车体转向角和速度信息。
11、所述的基于异构多处理系统的agv控制器中,所述实时处理单元rpu运行实时操作系统rtos或者裸机运行。
12、所述的基于异构多处理系统的agv控制器中,所述实时处理单元rpu包括运动解算单元、手动操控单元、避障测控单元和安全防护单元。
13、所述的基于异构多处理系统的agv控制器中,所述实时处理单元rpu经由外围接口连接rpu传感装置,所述rpu传感装置包括编码器、驱动器、光电开关、电量检测模块、读码器和声光系统。
14、所述的基于异构多处理系统的agv控制器中,神经网络加速器包括以硬件编程的方式写入fpga的神经网络模型,神经网络模型实时处理图像数据,并将检测结果存储在指定地址,处理系统ps侧通过axi总线访问指定地址获取检测结果,并进行后处理得到位置信息并通知agv控制器。
15、所述的基于异构多处理系统的agv控制器中,神经网络加速器包括基于深度学习的目标检测算法,对已经训练优化后的神经网络模型量化为定点数据格式以便于在fpga上进行运算,将所述神经网络模型转换为可部署的模型文件,并保存权重参数文件和偏置参数文件。启动后神经网络加速器加载相应参数进行推理计算得到最终检测结果。
16、和现有技术相比,本发明具有以下优点:
17、基于异构多处理系统的agv控制器中,由于异构处理系统核心板的主芯片涉及了ps侧和pl侧,在该控制器ps侧的apu上运行嵌入式操作系统,处理复杂应用算法,包括感知、定位、规划、决策等算法;在ps侧的rpu运行实时性要求较高的紧急安全制动和agv控制算法;在pl侧fpga上可以进行神经网络加速处理,增强agv智能感知能力;因此通过该agv控制器不仅实现目前传统工控机加控制器的效果,而且具有更高的整体系统速度、更低的功耗、更小的物理尺寸和更好的可靠性。同时由于fpga硬件可编程的灵活性,可以设计多种接口,实现控制器的高度灵活性和可扩展性。
技术特征:
1.一种基于异构多处理系统的agv控制器,其特征在于,其包括:
2.根据权利要求1所述的基于异构多处理系统的agv控制器,其特征在于,优选的,应用处理单元apu运行用于处理应用算法的嵌入式操作系统。
3.根据权利要求2所述的基于异构多处理系统的agv控制器,其特征在于,所述嵌入式操作系统为基于petalinux下的linux操作系统,其处理感知、定位、规划、决策算法。
4.根据权利要求2所述的基于异构多处理系统的agv控制器,其特征在于,所述应用处理单元apu包括感知通信模块和运动规划模块,所述感知通信模块包括传感数据对齐单元、障碍物定位单元、无依托定位单元、局部代价地图单元和云端通信单元,所述运动规划模块包括局部贝赛尔曲线生成单元、预瞄点生成单元、预瞄点跟踪单元和速度控制单元。
5.根据权利要求4所述的基于异构多处理系统的agv控制器,其特征在于,所述应用处理单元apu经由所述外围接口连接apu传感装置,apu传感装置包括深度相机、uwb、激光雷达、通信模块和显示器,所述应用处理单元apu将apu传感装置的传感数据时间戳对齐,进行多源传感器数据融合处理实现环境感知和定位,根据通信模块接收到的云端通信单元所下发的任务路径,进行路径规划,由运动规划模块生成agv车体转向角和速度信息。
6.根据权利要求1所述的基于异构多处理系统的agv控制器,其特征在于,所述实时处理单元rpu运行实时操作系统rtos或者裸机运行。
7.根据权利要求6所述的基于异构多处理系统的agv控制器,其特征在于,所述实时处理单元rpu包括运动解算单元、手动操控单元、避障测控单元和安全防护单元。
8.根据权利要求7所述的基于异构多处理系统的agv控制器,其特征在于,所述实时处理单元rpu经由外围接口连接rpu传感装置,所述rpu传感装置包括编码器、驱动器、光电开关、电量检测模块、读码器和声光系统。
9.根据权利要求1所述的基于异构多处理系统的agv控制器,其特征在于,神经网络加速器包括以硬件编程的方式写入fpga的神经网络模型,神经网络模型实时处理图像数据,并将检测结果存储在指定地址,处理系统ps侧通过axi总线访问指定地址获取检测结果,并进行后处理得到位置信息并通知agv控制器。
10.根据权利要求1所述的基于异构多处理系统的agv控制器,其特征在于,神经网络加速器包括基于深度学习的目标检测算法,对已经训练优化后的神经网络模型量化为定点数据格式以便于在fpga上进行运算,将所述神经网络模型转换为可部署的模型文件,并保存权重参数文件和偏置参数文件,启动后神经网络加速器加载相应参数进行推理计算得到最终检测结果。
技术总结
一种基于异构多处理系统的AGV控制器,AGV控制器中,底板包括电源模块、按键以及外围接口;核心板通过板间连接器插在所述底板上,所述核心板包括异构多处理系统芯片、晶振和内存,所述异构多处理系统芯片包括,处理系统PS侧,其包括应用处理单元APU和实时处理单元RPU;可编程逻辑PL侧,其包括带有神经网络加速器的FPGA,处理系统PS侧将图像数据传给可编程逻辑PL侧的神经网络加速器进行基于深度学习的目标检测。
技术研发人员:任鹏举,景鑫,丁焱,焦崇珊,赵文哲,夏天,孙海燕
受保护的技术使用者:西安交通大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!