一种垄间移动机器人路径规划方法
本发明涉及智慧农业,特别是涉及一种垄间移动机器人路径规划方法。
背景技术:
1、随着智慧农业的发展,人工作业已不能满足现实的需求。农业机器人实现自主作业,要求移动机器人能够按垄间环境规划路径并实现自主导航,路径规划决定机器人的移动路径,是农业机器人完成自主作业的关键技术之一。路径规划包含全局路径规划和局部路径规划,全局路径规划是在路径规划前,移动机器人利用传感器进行环境建图,在完成建图的静态地图上进行路径规划,为机器人提供全局的路径信息;局部路径规划是在移动机器人沿全局路径运行时,对传感器实时检测到的静、动态障碍物进行避障,为机器人提供局部避障路径信息。
2、针对垄间环境的路径规划要求:移动机器人携带机械臂按照要求在垄间移动,遍历所有垄间完成垄间作业任务;在移动机器人运行时,可能会遇到其他障碍物以及作业人员,需要实现对静、动态障碍物的实时避障。现有技术研究了点对点的路径规划,缺少对沿垄间中心线和垄间两侧路径规划方法的研究;部分研究缺少对动态环境中静、动态障碍物的实时避障。因此,设计一种新型的垄间移动机器人路径规划方法是十分有必要的。
技术实现思路
1、本发明的目的是提供一种垄间移动机器人路径规划方法,能够基于优化a*算法完成沿垄间中心线或垄间两侧的全局路径规划,并能利用dwa算法实现对全局路径上静、动态障碍物的实时避障,保证了机器人和作业人员的安全。
2、为实现上述目的,本发明提供了如下方案:
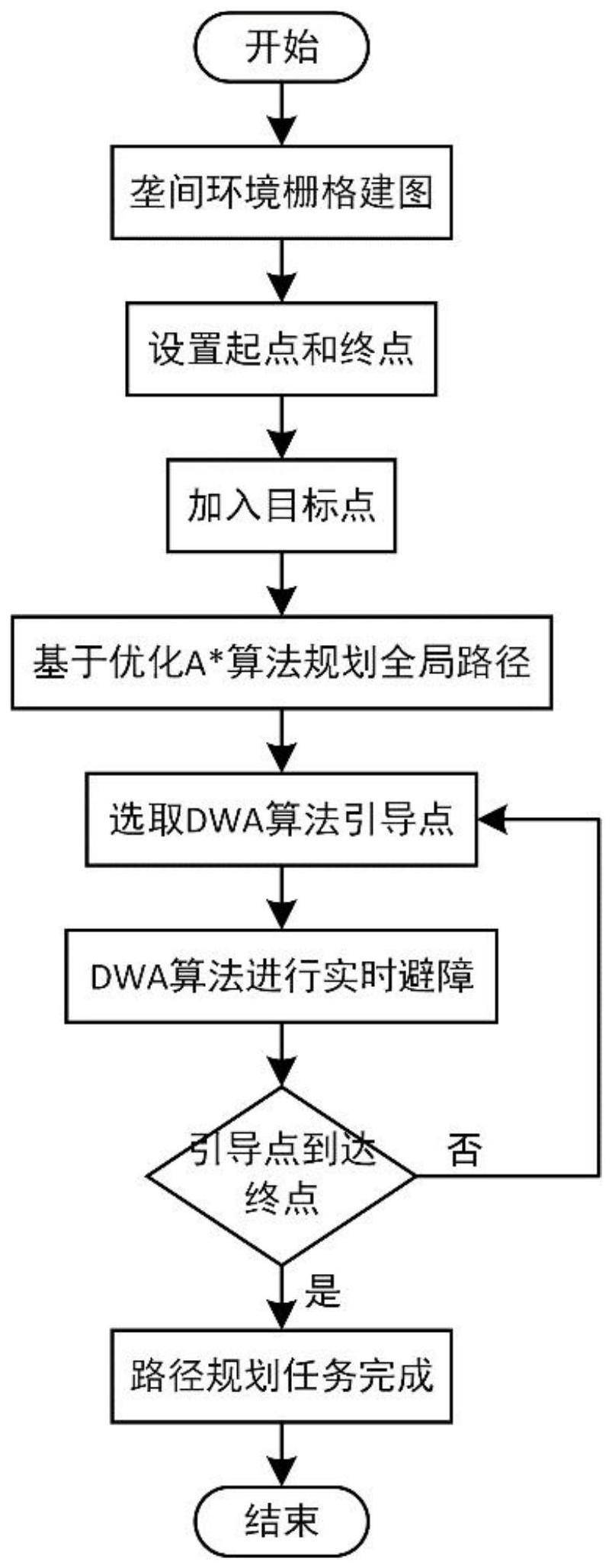
3、一种垄间移动机器人路径规划方法,包括如下步骤:
4、步骤1:设置传感器,通过传感器进行垄间环境栅格建图;
5、步骤2:初始化参数,在建图的静态地图中设置起点s及终点e;
6、步骤3:在建图的静态地图中从起点s开始沿垄间布置目标点t1,t2,...,te,直至终点e;
7、步骤4:使用优化评价函数的a*算法进行分段搜索路径;
8、步骤5:依次连接所有路径点,进行垄间环境的全局路径规划;
9、步骤6:在建图的动态地图中设置起点s及终点e,并加入静态障碍物及动态障碍物,将机器人放置在动态环境地图的起点s处;
10、步骤7:提取全局路径规划上的点作为dwa算法的引导点,使得机器人沿全局路径规划的轮廓移动,通过dwa算法对动态环境地图中静态障碍物及动态障碍物实时避障。
11、可选的,步骤3中,在建图的静态地图中从起点s开始沿垄间布置目标点t1,t2,...,te,直至终点e,具体为:
12、在建图的静态地图中从起点s开始沿垄间两端的两侧,呈弓字形布置目标点t1,t2,...,te,直至终点e。
13、可选的,步骤3中,在建图的静态地图中从起点s开始沿垄间布置目标点t1,t2,...,te,直至终点e,具体为:
14、在建图的静态地图中从起点s开始沿垄间中心线的两端,呈弓字形布置目标点t1,t2,...,te,直至终点e。
15、可选的,步骤4中,使用优化评价函数的a*算法进行分段搜索路径,具体为:
16、使用优化评价函数的a*算法进行分段搜索路径,以起点t1搜索路径,直至搜索到目标点t2,再以目标点t2为起点,搜索目标点t3,依次搜索直至终点te,每搜索完一段路径后提取路径点并保存数据,再进行下一目标点的搜索,依次搜索完全部路径,其中,优化评价函数为:
17、f(n)=g(n)+h(n)+d(n)
18、式中,f(n)为从起点经由节点n到终点的估计代价,g(n)为起点到节点n的实际移动距离代价项,h(n)为节点n到目标点的估算距离代价项,d(n)为向量叉积代价项。
19、可选的,向量叉积代价项d(n)用于评价搜索的当前节点到目标点ti和目标点ti+1连接直线的距离大小,其表达式为:
20、
21、式中,ni为目标点ti,ni+1为目标点ti+1,n为当前节点,θ为两个向量的夹角。
22、可选的,步骤7中,提取全局路径规划上的点作为dwa算法的引导点,使得机器人沿全局路径规划的轮廓移动,通过dwa算法对动态环境地图中静态障碍物及动态障碍物实时避障,具体为:
23、提取全局路径规划上的点作为dwa算法的引导点,此引导点为距离机器人一定距离的点,伴随着机器人的接近进行迭代前进,直至引导机器人到达重点,使得机器人沿全局路径规划的轮廓移动,通过dwa算法对动态环境地图中静态障碍物及动态障碍物实时避障,其中,dwa算法在允许速度空间(v,w)中采样多组速度,模拟出这些速度在一定时间内的运动轨迹,通过优化评价函数对这些轨迹进行评价,选取最优轨迹对应的(v,w)作为当前的移动速度,在避障时,在优化评价函数中分离作物距离评价项,根据障碍物分布情况,调节两侧作物距离评价项的权重,让没有障碍物一侧的模拟轨迹获得更大评价值,从而使移动机器人脱离局部最优,在原有评价函数基础上分离作物距离评价项得到的优化评价函数为:
24、g(v,w)=αheading+βvel+γdistobs+δldist+μrdist
25、式中,heading为方位角评价项,vel为速度评价项,distobs为分离作物的障碍物评价项,ldist为左侧作物距离评价项,模拟轨迹与左侧作物行的距离,rdist为右侧作物距离评价项,模拟轨迹与右侧作物行的距离,α、β、γ、δ、μ为各项的权重系数。
26、根据本发明提供的具体实施例,本发明公开了以下技术效果:本发明提供的垄间移动机器人路径规划方法,该方法包括设置传感器,通过传感器进行垄间环境栅格建图,初始化参数,在建图的静态地图中设置起点s及终点e,在建图的静态地图中从起点s开始沿垄间布置目标点t1,t2,...,te,直至终点e,使用优化评价函数的a*算法进行分段搜索路径,依次连接所有路径点,进行垄间环境的全局路径规划,在建图的动态地图中设置起点s及终点e,并加入静态障碍物及动态障碍物,将机器人放置在动态环境地图的起点s处,提取全局路径规划上的点作为dwa算法的引导点,使得机器人沿全局路径规划的轮廓移动,通过dwa算法对动态环境地图中静态障碍物及动态障碍物实时避障,该方法使用优化评价函数的a*算法在躲避固定障碍物后也能沿垄间中心线或垄间两侧规划路径,通过对目标点进行不同的布置,得到沿垄间中心线和垄间两侧两种移动路径,在评价函数中分离作物评价项,解决陷入局部最优的情况,能利用dwa算法实现对全局路径上静、动态障碍物的实时避障,保证了机器人和作业人员的安全。
技术特征:
1.一种垄间移动机器人路径规划方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的垄间移动机器人路径规划方法,其特征在于,步骤3中,在建图的静态地图中从起点s开始沿垄间布置目标点t1,t2,...,te,直至终点e,具体为:
3.根据权利要求1所述的垄间移动机器人路径规划方法,其特征在于,步骤3中,在建图的静态地图中从起点s开始沿垄间布置目标点t1,t2,...,te,直至终点e,具体为:
4.根据权利要求2或3所述的垄间移动机器人路径规划方法,其特征在于,步骤4中,使用优化评价函数的a*算法进行分段搜索路径,具体为:
5.根据权利要求4所述的垄间移动机器人路径规划方法,其特征在于,向量叉积代价项d(n)用于评价搜索的当前节点到目标点ti和目标点ti+1连接直线的距离大小,其表达式为:
6.根据权利要求5所述的垄间移动机器人路径规划方法,其特征在于,步骤7中,提取全局路径规划上的点作为dwa算法的引导点,使得机器人沿全局路径规划的轮廓移动,通过dwa算法对动态环境地图中静态障碍物及动态障碍物实时避障,具体为:
技术总结
本发明提供了一种垄间移动机器人路径规划方法,包括:通过传感器进行垄间环境栅格建图,在建图的静态地图中设置起点S及终点E,从起点S开始沿垄间布置目标点t<subgt;1</subgt;,t<subgt;2</subgt;,...,t<subgt;e</subgt;,直至终点E,使用优化评价函数的A*算法进行分段搜索路径,进行垄间环境的全局路径规划,在建图的动态地图中加入静态障碍物及动态障碍物,将机器人放置在起点S处,提取全局路径规划上的点作为DWA算法的引导点,使机器人沿全局路径规划的轮廓移动,通过DWA算法对动态环境地图中静态及动态障碍物实时避障。本发明能够基于优化A*算法完成沿垄间中心线或垄间两侧的全局路径规划,并能利用DWA算法实现对全局路径上静、动态障碍物的实时避障,保证了机器人和作业人员的安全。
技术研发人员:张延军,马创创,韩雨,张朋琳,郭栋梁,陈博,程亮
受保护的技术使用者:太原科技大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!