一种线控制动系统功能安全测试方法与流程
本发明涉及车辆测试,具体涉及一种线控制动系统功能安全测试方法。
背景技术:
1、随着汽车智能化电动化的发展,功能安全的地位愈加凸显,《汽车产业中长期发展规划》等一系列重要文件确立了功能安全在智能网联汽车标准体系建设中的重要性,工信部已明确把功能安全及预期功能安全保障、网络安全保障纳入产品准入管理办法。与此同时,随着新能源智能汽车市场的发展,线控制动渗透率越来越高,“ebooster+esc”组合two-box方案成为了目前市场上最主流的线控制动系统。此外,随着高阶辅助驾驶系统和自动泊车系统的普及,“ebooster+esc”在其中也扮演着重要角色。此系统正是一种涉及功能安全的关键系统,对其进行功能安全测试和验证是非常必要的。
2、但是,目前针对制动功能安全相关标准仍处在预研阶段,尚未有比较完善的测试方法。特别是针对“ebooster+esc”这类功能性更强、更复杂的线控制动系统,对于功能安全的测试需求度和测试要求更高,目前亟需一种能够适配此类系统测试要求的功能安全测试方案。
技术实现思路
1、本发明意在提供一种线控制动系统功能安全测试方法,能够高效完成针对线控制动系统的功能安全确认和验证,并且,测试评价指标明确。
2、本发明提供的基础方案为:一种线控制动系统功能安全测试方法,包括以下步骤:
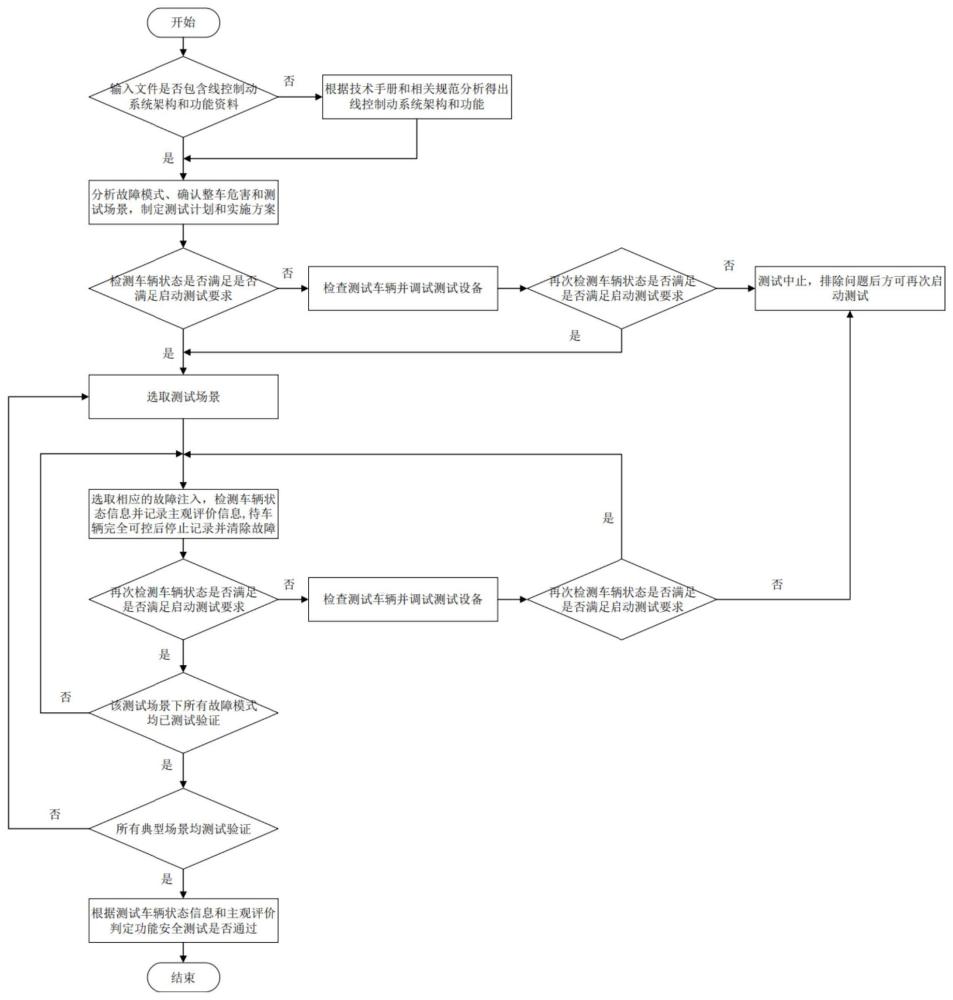
3、s1,安装测试设备并检测测试车辆状态是否满足测试条件,若不满足,则对测试车辆和测试设备进行检查调试后再次检测测试车辆状态,若仍不满足则中止测试并全面排查问题;当车辆状态满足测试条件后,执行下一步骤;
4、s2,驾驶员驾驶测试车辆按预设的测试场景进行正常行驶;所述测试场景根据hazop分析方法进行设定;
5、s3,在不提醒驾驶员的情况下向测试车辆进行故障注入,同时检测测试车辆的状态信息,并记录驾驶员主观评价内容,待测试车辆完全可控后停止记录并清除故障,执行下一步骤;
6、s4,再次检测测试车辆状态是否满足测试条件,若不满足,则对车辆和设备进行检查调试后再次检测车辆状态,若仍不满足则中止测试并全面排查问题;当测试车辆状态满足测试条件后执行下一步骤;
7、s5,检查该测试场景下导致危害的故障模式是否均已完成测试验证;若否,则更改故障模式并执行步骤s3,继续在该测试场景下测试;若是,则执行下一步骤;
8、s6,检查所有典型测试场景是否均测试完成;若否,则更改测试场景,执行步骤s2;若是,则结束测试,执行下一步骤;
9、s7,结束测试后,分析测试车辆状态信息,得到客观评价数据;并结合客观评价的可接受标准和主观评价记录,判定功能安全测试是否通过。
10、本发明的工作原理及优点在于:
11、本方案基于ehb two-box方案制动系统的结构和功能进行安全分析,导出功能安全需求,确认故障模式和整车危害,并根据故障模式和整车危害制定整车层面的验证和确认计划。根据验证和确认计划进行功能安全测试,每次测试开始均需要检测车辆状态是否满足测试需求,避免测试失败。测试结束后需要对测试结果进行分析,从而判定线控制动系统是否满足功能安全需求。本方案能够高效完成针对线控制动系统的功能安全确认和验证。其中,测试方法采用典型测试场景,以及不同测试场景下的不同测试工况的测试步骤,能够对测试车辆及其制动系统进行便捷的测试。并且,在评价阶段,提取测试评价指标,结合客观评价数据和主观评价记录进行评价,能够多维角度对测试结果进行综合评价,评价可靠度较高。
技术特征:
1.一种线控制动系统功能安全测试方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种线控制动系统功能安全测试方法,其特征在于,在s1前还包括预备步骤;所述预备步骤包括:s01,检查测试车辆的输入文件是否包含线控制动系统架构和对应功能的详细资料;若有,执行步骤s03;若无,执行下一步骤;
3.根据权利要求2所述的一种线控制动系统功能安全测试方法,其特征在于,在s03中,所述故障模式包括控制器故障、网络故障、电源故障、esc故障和ebooster故障;所述整车危害包括非预期的纵向运动和非预期的横向运动。
4.根据权利要求2所述的一种线控制动系统功能安全测试方法,其特征在于,所述典型测试场景包括:第一类场景,在高速路段直线行驶,且本车速度为100km/h,前车速度为60km/h,本车与前车相距100m;本车发出制动请求但无制动力或制动力过小;第二类场景,8%坡度路段上驻车,无制动力或制动力过小;第三类场景,在城市道路中进行正常巡航,车辆为d档,车辆发出制动请求但制动力过大;第四类场景,在高速路上以100km/h的速度直行,低附路面车辆,车辆为d档,进行非预期制动。
5.根据权利要求1所述的一种线控制动系统功能安全测试方法,其特征在于,所述故障注入的方式包括通过通信故障、硬线故障、软件故障、传感器故障和供电故障的方式进行注入;并且,直到当前测试工况下所有故障注入测试完毕后,方可进行下一测试工况测试。
6.根据权利要求1所述的一种线控制动系统功能安全测试方法,其特征在于,所述客观评价数据包括横摆角速度最大值、车道偏移距离、故障提示时间和驾驶员操作时间。
7.根据权利要求6所述的一种线控制动系统功能安全测试方法,其特征在于,所述客观评价数据按照下式计算得到:
8.根据权利要求7所述的一种线控制动系统功能安全测试方法,其特征在于,当客观评价数据中,横摆角速度最大值≤3°/s、车道偏移距离≤0.4m、故障提示时间≤1s、驾驶员操作时间≥1.52+0.6+|(vt-v0)|/a时,则判定为客观评价测试通过。
9.根据权利要求1所述的一种线控制动系统功能安全测试方法,其特征在于,驾驶员的主观评价内容采用7分制计分方式;当主观评价评分≥5分时,则判定为主观评价测试通过。
10.根据权利要求1所述的一种线控制动系统功能安全测试方法,其特征在于,当客观评价测试与主观评价测试均通过时,判定为功能安全测试通过。
技术总结
本发明涉及车辆测试技术领域,公开了一种线控制动系统功能安全测试方法,本测试方法基于EHB制动系统的结构和功能进行安全分析,导出功能安全需求,确认故障模式和整车危害,并根据故障模式和整车危害制定整车层面的验证和确认计划,提出典型测试场景,选取测试评价指标,主客观测试评价结合以综合评判是否满足功能安全要求。本发明能够高效完成针对EHB线控制动系统的功能安全确认和验证,具备明确的主客观测试评价指标及其阈值,便于制动系统功能安全整车道路试验的开展及结果评价,有助于推动线控制动系统及功能安全测试评价技术的发展。
技术研发人员:邹波,李青松,李林学,袁圆,竹利江
受保护的技术使用者:中国汽车工程研究院股份有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!