一种基于数据链组网的无人机控制方法及系统与流程
本发明涉及无人机控制,具体而言,涉及基于数据链组网的无人机控制方法及系统。
背景技术:
1、当前,地震灾害发生后,救援工作的组织和协调仍然面临巨大挑战。传统的救援方法通常过于依赖人工决策和资源调配,导致响应时间较长,效率不高,甚至出现资源浪费的情况。此外,对于地震灾害中的伤员情况的及时了解和精确评估也一直是一个关键问题。现有技术在这些方面存在着一定的局限性,因为它们往往依赖于传统通信手段,对于大面积地震灾害区域的实时监测、资源调度和救援计划制定提供了有限的支持。
2、针对这些问题,本发明提出了一种将多类别无人机的组网和协同作业,用于收集大量地震灾害信息,并实施高效的救援的方法及系统,进而保证快速高效的进行救援,保证救援的稳定进行,减少了正常救援的时间,提高救援效率。
技术实现思路
1、本发明的目的在于提供一种基于数据链组网的无人机控制方法及系统,以改善上述问题。为了实现上述目的,本发明采取的技术方案如下:
2、一方面,本申请提供了一种基于数据链组网的无人机控制方法,包括:
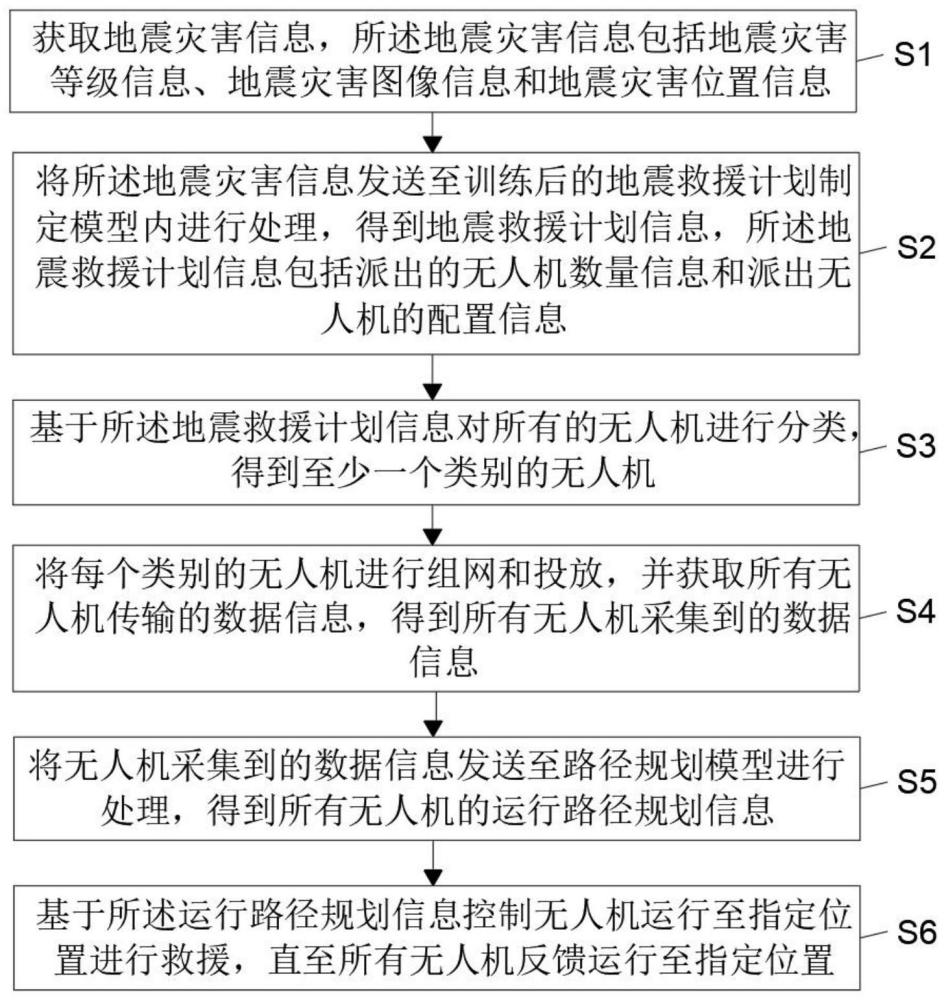
3、获取地震灾害信息,所述地震灾害信息包括地震灾害等级信息、地震灾害图像信息和地震灾害位置信息;
4、将所述地震灾害信息发送至训练后的地震救援计划制定模型内进行处理,得到地震救援计划信息,所述地震救援计划信息包括派出的无人机数量信息和派出无人机的配置信息;
5、基于所述地震救援计划信息对所有的无人机进行分类,得到至少一个类别的无人机;
6、将每个类别的无人机进行组网和投放,并获取所有无人机传输的数据信息,得到所有无人机采集到的数据信息;
7、将无人机采集到的数据信息发送至路径规划模型进行处理,得到所有无人机的运行路径规划信息;
8、基于所述运行路径规划信息控制无人机运行至指定位置进行救援,直至所有无人机反馈运行至指定位置。
9、另一方面,本申请还提供了一种基于数据链组网的无人机控制系统,包括:
10、获取单元,用于获取地震灾害信息,所述地震灾害信息包括地震灾害等级信息、地震灾害图像信息和地震灾害位置信息;
11、第一处理单元,用于将所述地震灾害信息发送至训练后的地震救援计划制定模型内进行处理,得到地震救援计划信息,所述地震救援计划信息包括派出的无人机数量信息和派出无人机的配置信息;
12、第二处理单元,用于基于所述地震救援计划信息对所有的无人机进行分类,得到至少一个类别的无人机;
13、第三处理单元,用于将每个类别的无人机进行组网和投放,并获取所有无人机传输的数据信息,得到所有无人机采集到的数据信息;
14、第四处理单元,用于将无人机采集到的数据信息发送至路径规划模型进行处理,得到所有无人机的运行路径规划信息;
15、第五处理单元,用于基于所述运行路径规划信息控制无人机运行至指定位置进行救援,直至所有无人机反馈运行至指定位置。
16、本发明的有益效果为:
17、本发明通过获取地震灾害信息,包括等级、图像和位置等,建立地震救援计划,包括无人机数量和配置信息。然后,根据这一计划,对多类别无人机进行组网和投放,以收集丰富的数据。通过图像处理和深度学习技术,本发明能够识别受灾人员的位置和伤口情况,从而进行优先级别的确定。此外,通过优化路径规划,本发明可以将无人机有效地调度至指定位置进行救援,直至任务完成。
18、这一技术创新解决了传统地震灾害救援中的资源调配、实时信息获取和响应效率等问题。通过数据链组网,本发明能够实现多类别无人机的智能协同作业,快速响应地震灾害,提高了救援效率和准确性。
19、本发明的其他特征和优点将在随后的说明书阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明实施例了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
技术特征:
1.一种基于数据链组网的无人机控制方法,其特征在于,包括:
2.根据权利要求1所述的基于数据链组网的无人机控制方法,其特征在于,将所述地震灾害信息发送至训练后的地震救援计划制定模型内进行处理,得到地震救援计划信息,包括:
3.根据权利要求1所述的基于数据链组网的无人机控制方法,其特征在于,基于所述地震救援计划信息对所有的无人机进行分类,得到至少一个类别的无人机,包括:
4.根据权利要求1所述的基于数据链组网的无人机控制方法,其特征在于,将每个类别的无人机进行组网和投放,并获取所有无人机传输的数据信息,得到所有无人机采集到的数据信息,包括:
5.根据权利要求1所述的基于数据链组网的无人机控制方法,其特征在于,将无人机采集到的数据信息发送至路径规划模型进行处理,得到所有无人机的运行路径规划信息,包括:
6.根据权利要求5所述的基于数据链组网的无人机控制方法,其特征在于,所述训练后的决策树模型的构建方法,包括:
7.根据权利要求5所述的基于数据链组网的无人机控制方法,其特征在于,所述路径规划模型的构建方法,包括:
8.一种基于数据链组网的无人机控制系统,其特征在于,包括:
9.根据权利要求8所述的基于数据链组网的无人机控制系统,其特征在于,所述第一处理单元包括:
10.根据权利要求8所述的基于数据链组网的无人机控制系统,其特征在于,所述第二处理单元包括:
技术总结
本发明提供了一种基于数据链组网的无人机控制方法及系统,涉及无人机控制技术领域,包括获取地震灾害信息,包括地震等级、图像和位置,将所述地震灾害信息发送至地震救援计划模型,生成无人机派遣计划,并根据计划对无人机进行分类、配置和组网,以采集数据,将收集到的数据传送至路径规划模型,生成运行路径规划,最后将无人机配置至指定位置进行救援,直至任务完成。本发明有效整合了地震灾害信息、计划制定、分类、组网、数据收集、路径规划和执行反馈,提高了救援效率和精确性。
技术研发人员:曹天陛,赵晓光,方光青,赵静,王永强
受保护的技术使用者:云农京飞(北京)科技股份有限公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!