用于水下无人机开关机控制的装置及方法和水下无人机与流程
本发明涉及水下无人机,具体涉及一种用于水下无人机开关机控制的装置及方法和水下无人机。
背景技术:
1、随着对海洋领域的不断探索,水下无人机rov作为一种用于测绘科学技术领域的海洋仪器,应用频率越来越高,逐渐成为开展深海探测研究的一项重要工具。
2、目前水下无人机rov的本体低功耗主流的处理方式为在本体内单独设置一个电源管理微控制单元。该芯片判断或者外部输入进入低功耗的条件后,通过该电源管理微控制单元通过gpio(general-purpose io ports:通用io端口)关闭其他电源设备。仅保留为电源管理微控制单元自身供电的不间断电源,用于随时准备被用户唤醒或休眠操作。当rov本体进入低功耗模式后,rov本体静态电流包括电池自耗电电流、不间断电源电流及电源管理微控制单元电流。此方法不仅成本偏高而且耗电量较大。
3、因此需要一种低成本、低能耗的水下无人机开关机控制装置及方法。
技术实现思路
1、本申请旨在提供一种用于水下无人机的控制装置及方法和水下无人机,能够方便有效地对水下无人机的低功耗模式进行控制。
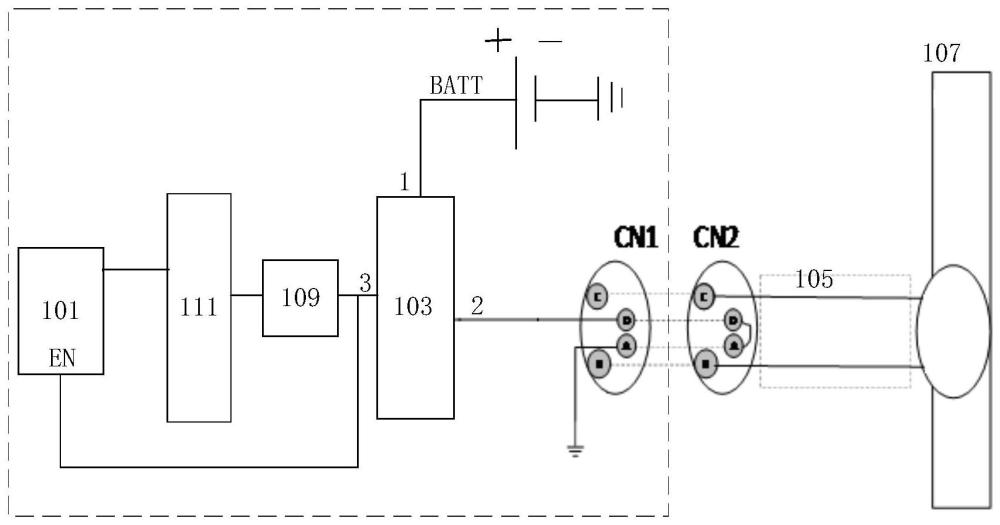
2、根据本申请的一方面,提供一种用于水下无人机开关机控制的装置,包括:
3、开关机触发模块,用于提供开关机触发信号;
4、供电控制模块,所述供电控制模块具有使能端子,所述供电控制模块根据输入至所述使能端子的信号控制所述水下机器人开机或关机;
5、信号控制模块,所述信号控制模块的第一端电连接至供电电源,所述信号控制模块的第二端接收所述开关机触发信号从而控制所述信号控制模块的第三端向所述使能端子输出控制信号;
6、强制关机模块,用于关闭所述使能端子;
7、微控制单元,用于控制所述强制关机模块向所述使能端子输出关闭信号。
8、根据一些实施例,所述开关机触发模块包括第一水密连接器,其中:
9、所述第一水密连接器用于连接至第二水密连接器,所述第二水密连接器连接至与控制手柄相连的零浮力通信线缆;
10、所述第一水密连接器和所述第二水密连接器均包括第一电连接部、第二电连接部、第三电连接部、第四电连接部;
11、所述第一水密连接器和所述第二水密连接器的所述第二电连接部和所述第三电连接部为通信电连接部;
12、所述第一水密连接器的所述第四电连接部连接至所述信号控制模块的第二端;
13、所述第一水密连接器的所述第一电连接部接地;
14、所述第二水密连接器的所述第一电连接部与其所述第四电连接部短接;
15、所述第一水密连接器连接至所述第二水密连接器时,所述第一水密连接器和所述第二水密连接器的相应第一电连接部、第二电连接部、第三电连接部、第四电连接部彼此电连接;
16、当所述第一水密连接器连接至所述第二水密连接器时,所述第一水密连接器向所述信号控制模块的第二端提供地信号,从而触发所述水下机器人开机;
17、当所述第一水密连接器断开与所述第二水密连接器的连接时,所述第一水密连接器向所述信号控制模块的第二端提供浮置信号,从而控制所述水下机器人关机。
18、根据一些实施例,所述微控制单元配置为:在预定时间内没有收到外部线控指令或/且所述水下机器人不在水中时,控制所述强制关机模块向所述使能端子输出关闭信号。
19、根据一些实施例,所述供电控制模块包括:
20、输入端、控制端和输出端,所述输入端电连接至所述供电电源,所述控制端电连接至所述使能端子,所述控制端控制所述输入端与所述输出端之间的导电通路导通或关闭;
21、至少一个受控电源,根据来自所述供电控制模块的所述输出端的电源信号输出电压信号。
22、根据一些实施例,所述微控制单元的电源端子连接至所述至少一个受控电源之一的电压输出端,且所述微控制单元向所述所述至少一个受控电源的使能端子输出控制信号。
23、根据一些实施例,所述强制关机模块包括三态门电路,所述三态门电路包括d类锁存器。
24、根据一些实施例,所述微控制单元通过gpio端口分别输出信号至所述d类锁存器的缓冲输出使能端子、锁存使能端子及数据端子,所述d类锁存器的输出端子输出控制信号至所述使能端子。
25、根据一些实施例,所述微控制单元以预定间隔读取深度传感器的深度数据,如果在预定持续时间内判断所述水下机器人的深度为0m,则判定所述水下机器人不在水中。
26、根据本申请的另一方面,提供一种水下无人机,包括上述任意一项所述的装置。
27、根据本申请的另一方面,提供一种用于水下无人机开关机控制的方法,所述方法包括:
28、在收到外部线控指令后,复位第一计时器并开始新的第一计时;
29、以预定间隔读取深度数据,在所述深度数据大于0时,复位第二计时器;在所述深度数据为0时,所述第二计时器开始第二计时;
30、如果所述第一计时大于第一预定时间且/或所述第二计时大于第二预定时间,所述微控制单元控制所述强制关机模块向所述使能端子输出关闭信号。
31、根据本申请实施例,通过水密连接器的连接与断开对所述水下无人机进行进出入低功耗模式进行控制,无需电源管理微控制单元即可实现低功耗控制及唤醒操作,节省成本。并且,当水下无人机在一定时间内没有进行操作信号,或者无人机本体所处位置长时间没有变化的话,无人机会自动进入低功耗模式。rov本体关机时的仅电池自耗电功耗,电路本身无任何功耗并且电路构成简洁,易实现可靠性及稳定性。
32、应当理解的是,以上的一般描述和后文的细节描述仅是示例性的,并不能限制本申请。
技术特征:
1.一种用于水下无人机开关机控制的装置,其特征在于,包括:
2.根据权利要求1所述的装置,其特征在于,所述开关机触发模块包括第一水密连接器,其中:
3.根据权利要求1所述的装置,其特征在于,所述微控制单元配置为:在预定时间内没有收到外部线控指令或/且所述水下机器人不在水中时,控制所述强制关机模块向所述使能端子输出关闭信号。
4.根据权利要求3所述的装置,其特征在于,所述供电控制模块包括:
5.根据权利要求4所述的装置,其特征在于,所述微控制单元的电源端子连接至所述至少一个受控电源之一的电压输出端,且所述微控制单元向所述所述至少一个受控电源的使能端子输出控制信号。
6.根据权利要求3所述的装置,其特征在于,所述强制关机模块包括三态门电路,所述三态门电路包括d类锁存器。
7.根据权利要求6所述的装置,其特征在于,所述微控制单元通过gpio端口分别输出信号至所述d类锁存器的缓冲输出使能端子、锁存使能端子及数据端子,所述d类锁存器的输出端子输出控制信号至所述使能端子。
8.根据权利要求3所述的装置,其特征在于,所述微控制单元以预定间隔读取深度传感器的深度数据,如果在预定持续时间内判断所述水下机器人的深度为0m,则判定所述水下机器人不在水中。
9.一种水下机器人,其特征在于,包括根据权利要求1-8中任意一项所述的装置。
10.一种用于水下无人机开关机控制的方法,用于根据权利要求9所述的水下机器人,其特征在于,所述方法包括:
技术总结
本申请提供一种用于水下无人机开关机控制的装置及方法和水下无人机,涉及水下无人机技术领域。所述控制装置包括:开关机触发模块,用于提供开关机触发信号;供电控制模块,供电控制模块具有使能端子,供电控制模块根据输入至使能端子的信号控制所述水下机器人开机或关机;信号控制模块,信号控制模块的第一端电连接至供电电源,信号控制模块的第二端接收开关机触发信号从而控制信号控制模块的第三端向供电控制模块的使能端子输出控制信号;强制关机模块,用于关闭所述使能端子;微控制单元,用于控制强制关机模块向使能端子输出关闭信号。利用本申请的方案可控制水下无人机进入低功耗模式,电路构成简单,成本低且可靠性高。
技术研发人员:白吉日木图,李伟,周加旺,宋红峰,李鹏程
受保护的技术使用者:深之蓝(天津)水下智能科技有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!